

Министерство образования Российской Федерации
Казанский государственный технический университет им. А.Н.Туполева
Кафедра автоматики и управления
Пояснительная записка к курсовой работе
по дисциплине "Теория автоматического управления"
Тема: Расчет системы регулирования напряжения.
Выполнил студент группы 3309 _________________ Краснова И.Ю.
(подпись)
Руководитель _________________ Терентьев С.А.
(подпись)
Оценка _____________
___________ _________________
(подпись) (Фамилия И.О.)
Казань, 2006
Содержание
Введение 3
Задание на курсовую работу 4
Глава 1. Расчет системы в линейном приближении 6
1.1 Вывод уравнений 6
1.2 Структурная схема системы 8
1.3 Передаточная функция по команде 8
1.4 Передаточная функция для ошибки 10
1.5 Определение коэффициента усиления системы 10
1.6 Исследование номинальных режимов работы системы 11
1.7 D-разбиение по общему коэффициенту усиления 12
1.8 Логарифмические характеристики 14
1.9 Корректирующее звено 15
1.10 Переходный процесс 21
Список литературы 25
Введение
Теория автоматического управления сейчас является самой перспективной и развивающейся наукой. Это обусловлено тем, что сегодня получают все больше распространения такие разработки, как беспилотные самолеты, космические станции без пилотируемого управления (спутники), робототехнические системы и так далее. Все перечисленное является по своей сути системами автоматического управления.
В данной работе ставится задача рассмотреть систему автоматического управления определенной структуры и выполняющей определенные задачи. Далее необходимо рассчитать параметры определенных ее частей для удовлетворения показателям качества системы. После чего необходимо провести коррекцию системы с помощью пассивных корректирующих устройств, обеспечивающих запасы устойчивости и быстродействие системы. Также необходимо провести исследование на параметры автоколебаний (и их устойчивость) и общий анализ системы при включении нелинейного элемента.
Таким образом, после выполнения работы, можно будет смело сказать, что автор работы научился проектировать системы автоматического управления, по крайней мере, данного типа.
Работа выполняется в виде настоящей пояснительной записки. Пояснительная записка состоит из следующих частей.
Вступительная глава содержит полное задание на работу – параметры функциональных частей системы, ее структура, показатели качества.
В первой главе описан весь процесс исследования системы в линейном приближении и расчет общего коэффициента усиления, обеспечивающего необходимые показатели качества.
Во второй главе содержится расчет системы с учетом нелинейности, расчет параметров автоколебаний, исследование фазового портрета.
В заключении даются выводы о проведенной автором курсовой работе.
Задание на курсовую работу
Дана система автоматического управления, схема которой изображена на рисунке I, и параметры устройств системы, приведенные в таблице I.
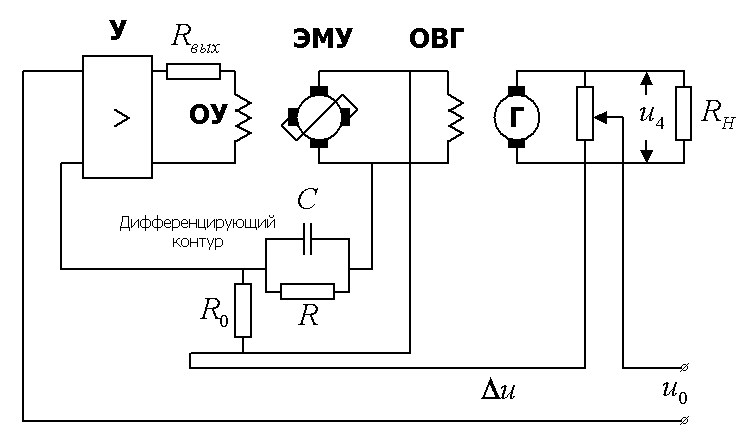
Рисунок I. Принципиальная схема системы регулирования напряжения (схема В).
В схеме приняты следующие обозначения.
У – электронный усилитель, на выходе которого возникает разность потенциалов, пропорциональная разности потенциалов на входе;
ОУ – обмотка управления электромашинным усилителем – выдает ток в зависимости от напряжения на концах обмотки;
ЭМУ – электромашинный усилитель напряжения – в зависимости от тока управления генерирует напряжение;
ОВГ – обмотка возбуждения генератора, на вход подается напряжение и на выходе возникает магнитный поток;
Г – генератор, получая магнитный поток с ОВГ, генерирует напряжение пропорциональное потоку;
Далее представлены параметры всех устройств, содержащихся в принципиальной схеме в соответствии с выданным вариантом задания.
Таблица 1 Характеристики устройств системы
|
Р (кВт) |
U (В) |
iM (А) |
iОУ (А) |
RЯ (Ом) |
RОУ (Ом) |
LОУ (Гн) |
Генератор |
630 |
700 |
880 |
40 |
0.025 |
6 |
6 |
ЭМУ |
12 |
250 |
48 |
0.06 |
0.2 |
42,0 |
2,5 |
Помимо этого другие элементы обладают следующими параметрами.
Выходное сопротивление усилителя 10 Ом.
Параметры короткозамкнутой цепи ЭМУ:
![]() .
.
Параметры делителя: R1 = R2 = 1кОм;
Сопротивление нагрузки: Rн = 20Ом;
Параметры корректирующей цепи: R0 = 4кОм, R = 400кОм, С = 1мкФ.
Необходимые параметры качества:
Быстродействие: 1.0 сек;
Динамическая ошибка: 30%;
Статическая ошибка: 2%;