Хасанов 2003 / шпора
.docЗадача многомерной безусловной оптимизации формулируется в виде:
min f(x),
xX
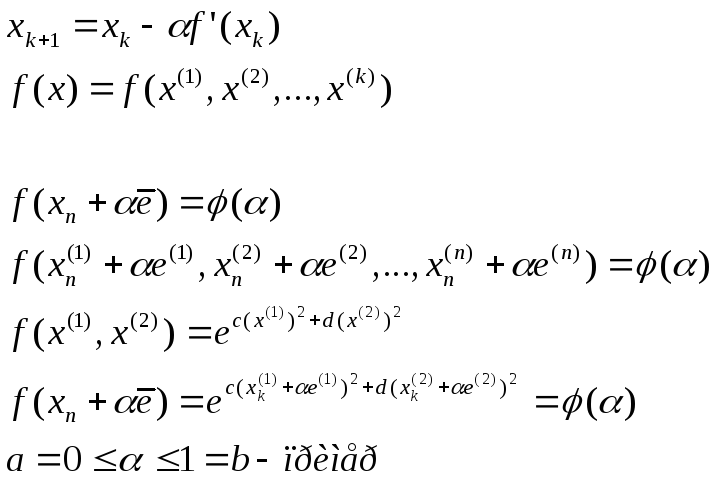
где x={x(1), x(2),…, x(n)} – точка в n-мерном пространстве X=IRn, то есть целевая функция f(x)=f(x(1),…,f(x(n)) – функция n аргументов.
Т. Необх-ое условие min 1-го порядка
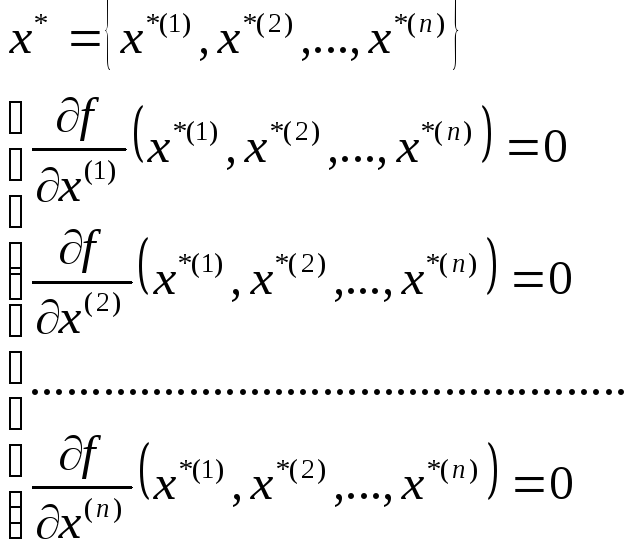 стационарная
X*
стационарная
X*
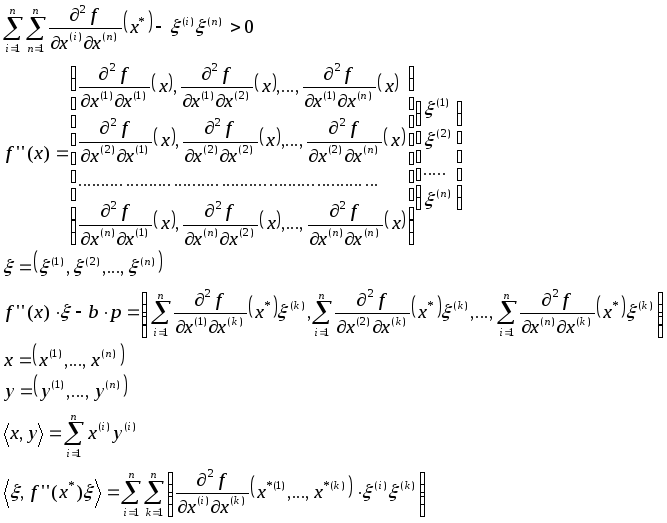
Т. Необходимое условие 2-го порядка

Т. Необходимое условие 2-го порядка
Х* - стационарная точка
![]()
Квадратичная форма записи
![]()
Достаточное условие 2-го порядка
![]() Х*
- стационарная точка
Х*
- стационарная точка
необх. условие
Х* - стацю точка
![]()
достат. условие
Х* - стацю точка
![]()
![]()
Вычислительные методы нахождения min в многомерном случае
(прямые методы)
первого значения f(x)
1-го порядка f(x), и df/d(x)(1)
2-го порядка – f(x), (df/dx)*(x), (d2f/dxdx)(x)
Методы нулевого порядка

усл-е ______: h≤ε
![]()
Метод симплекса
![]()
Метод деформируемого симплекса
![]()
Градиентные методы
Хк
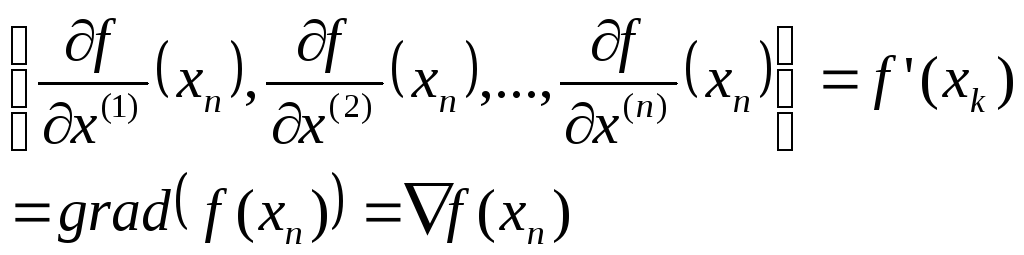
![]()
приращение
Общая схема
Градиент всегда _|_ линии уровня
![]() -
скаляр. пр-ие
-
скаляр. пр-ие
![]()
Д-во:
![]()
Пусть мы выбрали направ-е (м.б. не совпадающее с напр-ем f ’(x))
Тогда
![]()
![]()
Нужно
найти
![]()
Скалярное пр-ие:
![]()
-f ’(x) – антиградиент
![]()
Метод с дроблением шага
![]() опр-я
век-ра
опр-я
век-ра
Т. || Если ф-ия f(x) удовл-ет усл-ю для любых 2-х точек (x1,x2):
![]() усл-е
___________
усл-е
___________
то
α м. не дробить :
![]()
Без доказательства
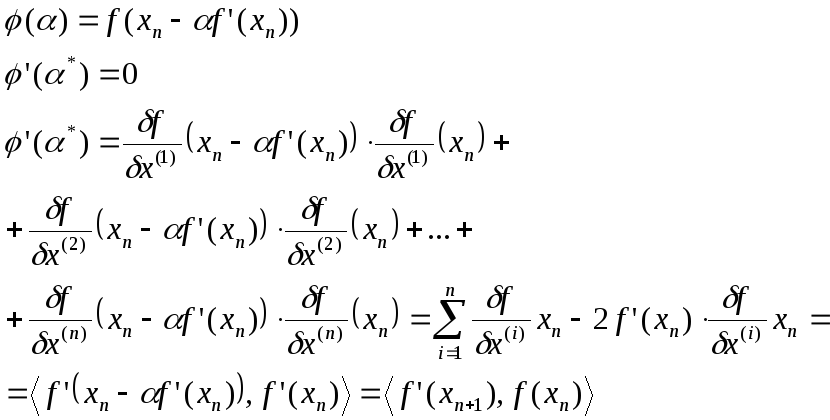
Метод наискорейшего спуска
св-во метода:
Т. || о сходимости градиентных методов ||
Если
f(x)
удовл-ет усл-ю Липшица
![]() ,
,
тогда
для любого Х0
обл-т св-вом
![]()
Методы покоординатного спуска
замечание: это тоже методы 1-го порядка!

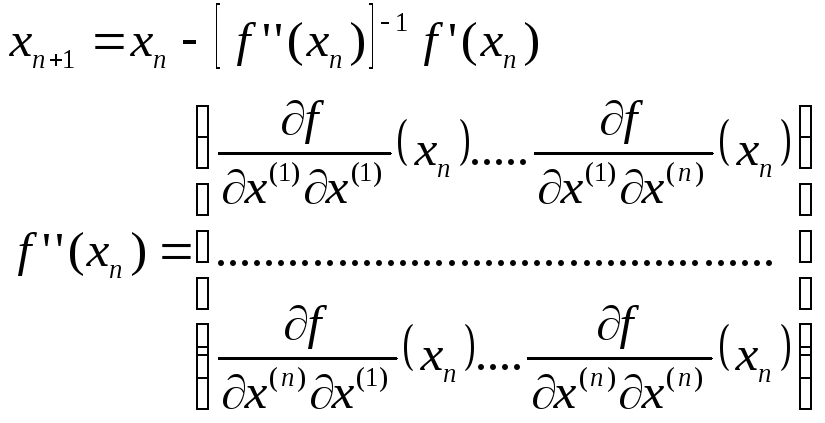
Методы Ньютона(м-ды 2-го порядка)
Общая схема: