

2.5. Приемная антенна активного канала
П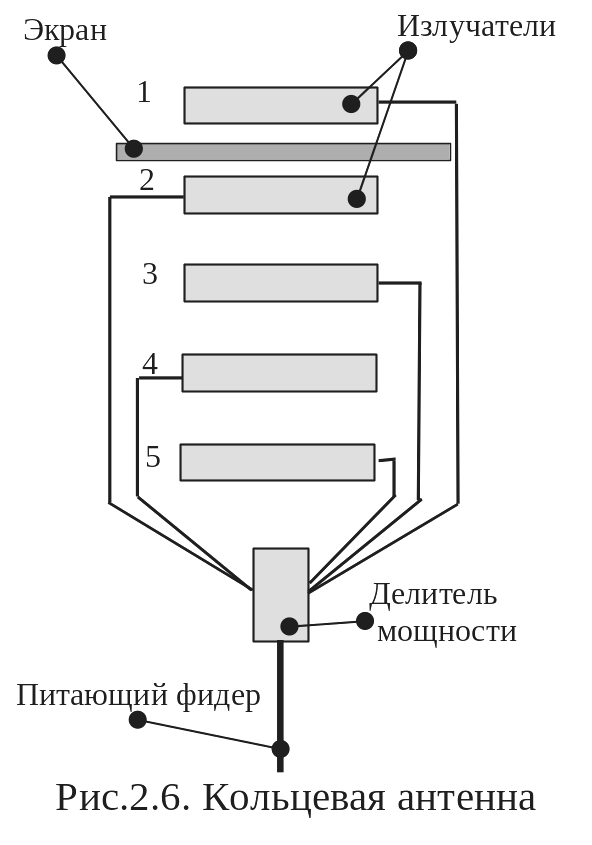 ри
работе ПРЛ-10МН в активном режиме работы
для приема сигналов от СО используется
специальная антенна приема ответных
сигналов. Необходимость применения
специальной антенны вызвана тем, что
запросные и ответные сигналы отличаются
по частоте более чем на порядок (
ри
работе ПРЛ-10МН в активном режиме работы
для приема сигналов от СО используется
специальная антенна приема ответных
сигналов. Необходимость применения
специальной антенны вызвана тем, что
запросные и ответные сигналы отличаются
по частоте более чем на порядок (![]() ,
а
,
а
![]() ).
С учетом того, что в ПРЛ-10МН имеется
возможность обеспечения посадки
с двух направлений, должен обеспечиваться
секторный прием ответных сигналов
в соответствии с зоной обзора ПРЛ. Это
в свою очередь требует размещения
антенны приема ответных сигналов на
балке привода, что приводит к ее
усложнению. Более простым решением
является использование антенны
с ненаправленными свойствами в
горизонтальной плоскости (3600)
при горизонтальной поляризации
принимаемого сигнала. В качестве
такой антенны применяется антенная
решетка, которая состоит из
вертикального ряда трехвибраторных
кольцевых излучателей (рис.2.6).
Диаграмма направленности антенны
в вертикальной плоскости
определяется длиной ряда, т.е., по
существу, количеством излучателей
в ряду и расстоянием между отдельными
излучателями. В вертикальной
плоскости антенна должна
иметь такую диаграмму
направленности, которая
обеспечила бы перекрытие
требуемой зоны обзора до
250 по углу места (
).
ВЧ энергия подводится к антенне
через питающий фидер. Делитель
мощности распределяет подводимую
энергию равномерно ко всем пяти
излучателям. Мощность от делителя к
излучателям подводится с помощью
системы фидеров. Если все фидеры
имели бы одинаковую длину, то все
вибраторы возбуждались бы синфазно.
При этом максимум диаграммы направленности
антенны в вертикальной плоскости
был бы направлен перпендикулярно
строительной оси антенны. Для
устранения глубоких интерференционных
провалов в диаграмме из-за влияния
Земли в ПРЛ-10МН максимум диаграммы
направленности антенны приподнят
над горизонтом на угол 100. Для
реализации этого подъема применяется
несинфазная запитка облучателей
антенной решетки, реализуемая
укорачиванием на l
длины фидеров запитки облучателей
(l1> l2,
l=36
мм). Антенна имеет коэффициент усиления
6…8. Коэффициент бегущей волны не
ниже 0,6. Экран позволяет несколько
расширить диаграмму направленности,
приближая ее по форме к косекансу.
).
С учетом того, что в ПРЛ-10МН имеется
возможность обеспечения посадки
с двух направлений, должен обеспечиваться
секторный прием ответных сигналов
в соответствии с зоной обзора ПРЛ. Это
в свою очередь требует размещения
антенны приема ответных сигналов на
балке привода, что приводит к ее
усложнению. Более простым решением
является использование антенны
с ненаправленными свойствами в
горизонтальной плоскости (3600)
при горизонтальной поляризации
принимаемого сигнала. В качестве
такой антенны применяется антенная
решетка, которая состоит из
вертикального ряда трехвибраторных
кольцевых излучателей (рис.2.6).
Диаграмма направленности антенны
в вертикальной плоскости
определяется длиной ряда, т.е., по
существу, количеством излучателей
в ряду и расстоянием между отдельными
излучателями. В вертикальной
плоскости антенна должна
иметь такую диаграмму
направленности, которая
обеспечила бы перекрытие
требуемой зоны обзора до
250 по углу места (
).
ВЧ энергия подводится к антенне
через питающий фидер. Делитель
мощности распределяет подводимую
энергию равномерно ко всем пяти
излучателям. Мощность от делителя к
излучателям подводится с помощью
системы фидеров. Если все фидеры
имели бы одинаковую длину, то все
вибраторы возбуждались бы синфазно.
При этом максимум диаграммы направленности
антенны в вертикальной плоскости
был бы направлен перпендикулярно
строительной оси антенны. Для
устранения глубоких интерференционных
провалов в диаграмме из-за влияния
Земли в ПРЛ-10МН максимум диаграммы
направленности антенны приподнят
над горизонтом на угол 100. Для
реализации этого подъема применяется
несинфазная запитка облучателей
антенной решетки, реализуемая
укорачиванием на l
длины фидеров запитки облучателей
(l1> l2,
l=36
мм). Антенна имеет коэффициент усиления
6…8. Коэффициент бегущей волны не
ниже 0,6. Экран позволяет несколько
расширить диаграмму направленности,
приближая ее по форме к косекансу.
2.6. Антенный привод прл-10мн
Антенный привод ПРЛ-10МН обеспечивает поочередное качание двух антенн (курсовой и глиссадной) в двух взаимно перпендикулярных плоскостях. Движение антенн "К" и "Г" в рабочем секторе обзора пространства приблизительно равномерное. При выходе из рабочего сектора антенны уменьшают свою скорость, останавливаются и затем начинают движение в обратную сторону. Кроме того, антенный привод обеспечивает доворот антенны глиссады в рабочем секторе антенны курса и наклон антенны курса в рабочем секторе антенны глиссады. В состав антенного привода входят блок управления антенн, антенна курса, антенна глиссады, механизм привода антенн курса и глиссады, механизм наклона антенны курса, механизм доворота антенны глиссады, поворотное устройство.
Пуск привода механизма качания курсовой и глиссадной антенн осуществляется включением тумблера ПРИВОД АНТЕННЫ, находящегося на пульте управления. При этом напряжение +27 В поступает на сирену, которая сигнализирует о включении питания блока привода, а также на реле времени. Реле времени обеспечивает выдержку времени 8…10 с перед подачей напряжения на двигатель привода. В течение этого времени сирена находится во включенном состоянии.
Качание антенн осуществляется от электродвигателя, который имеет частоту вращения 3750 об/мин. Эти вращения через "пространственный" кривошип, шатун и другие узлы кинематической схемы передаются на соответствующие поворотные кронштейны курса и глиссады. На поворотных кронштейнах "К" и "Г" установлены, соответственно, механизм наклона антенны "К" и механизм доворота антенны "Г". Вращательные движения электродвигателя преобразуются в поступательные движения ходовых винтов, перемещающих соответствующие антенны "К" и "Г". В соответствующих механизмах наклона и доворота размещаются сельсины-датчики развертывающих напряжений курса и глиссады. Поворотное устройство предназначено для поворота блока привода в пределах угла 3500 вручную с помощью маховика, через червячную передачу при необходимости изменения направления посадки ВС.