

2. Порядок виконання роботи
1. Скласти схему лабораторної установки відповідно до вказівок викладача.
2. Змінюючи величину світлового потоку дослідити характеристики фотоелектричного перетворювача.
3. Побудувати отримані характеристики.
4. Повторити вимірювання для різних типів фотоелектричних перетворювачів.
3. ЗМІСТ ЗВІТУ
1. Тема і мета роботи.
2. Перелік використаного обладнання.
3. Короткий зміст теоретичних відомостей, основні формули, схема лабораторної установки
4. Вихідні характеристики перетворювачів.
5. Висновок.
4. Література
1. Шарапов В.М. Датчики / В.М. Шарапов и др.; под ред. В.М. Шарапова и Е.С. Полищука. – Черкассы : Брама, 2008. – 1072 с.
2. Жеребцов И.П. Основы электроники. – Л.: Энергоатомиздат, 1989. – 352 с.
Лабораторна робота № 8 вимірювання температури за допомогою терморезисторів
Мета роботи: ознайомитися з принципом роботи терморезистивних перетворювачів, дослідити їх характеристики.
Обладнання: дослідницькі зразки терморезистивних перетворювачів, джерело теплового випромінювання, мультиметр.
1. Теоретичні відомості
В основу роботи дротяних і напівпровідникових резисторних датчиків покладено їх властивість змінювати опір при зміні температури. Зміна опору оцінюється величиною температурного коефіцієнта опору (ТКО). ТКО може бути або позитивним, або негативним. Позитивний ТКО говорить про те, що при збільшенні температури величина опору датчика зростає. При негативному ТКО це співвідношення буде зворотним. Такі датчики можна віднести до класу пасивних датчиків. Величина ТКО характеризує чутливість датчика.
Серед характеристик, що визначають якість датчиків температури, необхідно виділити:
а)
лінійність
залежності
опору R
від
температури.
Датчик
вважається
лінійним,
якщо
будь-яка зміна
температури
на
величину
Δt°
дає завжди
строго
пропорційну
зміну
параметра
датчика
(опору
R),
тобто виконується
умова
![]() незалежно
від початкової
температури;
незалежно
від початкової
температури;
б) час реакції τ. Час реакції характеризує динамічні властивості датчика. Він дорівнює проміжку часу, необхідному для зміни опору R з одного сталого значення, відповідного певній температурі t1°, до іншого сталого значення, відповідного іншій температурі t2°, якщо зміна температури з t1° до t2° здійснюється стрибкоподібно. Час реакції залежить від типу датчика, від його конструктивного виконання, теплопровідності його оболонок, маси тощо;
в) стабільність параметрів (R) у часі.
Найбільшого поширення серед термометрів опору отримали датчики, виготовлені з хімічно чистих металів, більшість яких має позитивний температурний коефіцієнт (платина, мідь, нікель). В обмеженому інтервалі температур, яким володіє тіло, залежність опору металів від температури можна вважати лінійною. При цьому характеристика датчика виражається рівнянням
![]() ,
,
де R0 – опір датчика при 0°С;
і β – температурні коефіцієнти опору даного металу;
t – температура датчика, °С.
Для наближених розрахунків можна обмежитися лінійним членом рівняння:
![]() .
.
І з урахуванням впливу сполучних проводів і перехідних опорів:
![]() .
.
Зазвичай, в схемах для вимірювання температури використовуються симетричні мости постійного струму.
У простому випадку мостова схема містить чотири резистора, з'єднаних у кільцевий замкнутий контур (рис. 8.1).
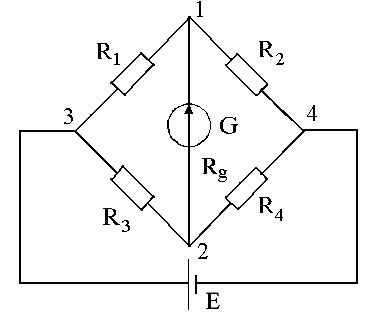
Рис. 8.1. Схема моста постійного струму
Резистори R1, R2, R3 і R4 цього контуру називаються плечима моста, а точки з'єднання цих плечей – вершинами моста. Ланки, що з'єднують протилежні вершини, називають діагоналями. Одна з діагоналей (3–4) містить джерело живлення E, а інша (1–2) – індикатор рівноваги G.
Міст називається урівноваженим, якщо різниця потенціалів між точками 1 і 2 дорівнює нулю, тобто напруга на діагоналі, яка містить індикатор нуля, відсутня і струм через індикатор дорівнює нулю.
Співвідношення між опорами плечей, при якому міст урівноважений, називається умовою рівноваги моста. Цю умову можна отримати, використовуючи закони Кірхгофа для розрахунку мостової схеми. Наприклад, для одинарного моста постійного струму залежність протікаючого через індикатор нуля (гальванометр) G струму від опорів плечей, опору гальванометра і напруги живлення U має вигляд:
 .
.
Звідси струм Ig буде дорівнює 0 при R1R4=R2R3. Це і є умова рівноваги одинарного моста постійного струму, яку можна сформулювати наступним чином: для того, щоб міст був урівноважений, добутки опорів протилежних плечей повинні бути рівні. Якщо опір одного з плечей невідомий (наприклад, RХ =R1), то умова буде мати вигляд:
 .
.
Таким
чином,
вимірювання за
допомогою
одинарного
моста
можна
розглядати
як порівняння
невідомого
опору
RХ
зі зразковим
опором
R2
при
збереженні
незмінним
відношення
![]() .
З цієї причини
плече
R2
називають
плечем
порівняння,
а
плечі
R3
і
R4
–
плечами
відношення.
.
З цієї причини
плече
R2
називають
плечем
порівняння,
а
плечі
R3
і
R4
–
плечами
відношення.