

Глава 4. Модель крана как пример применения шаговых двигателей
4.1 Устройство модели
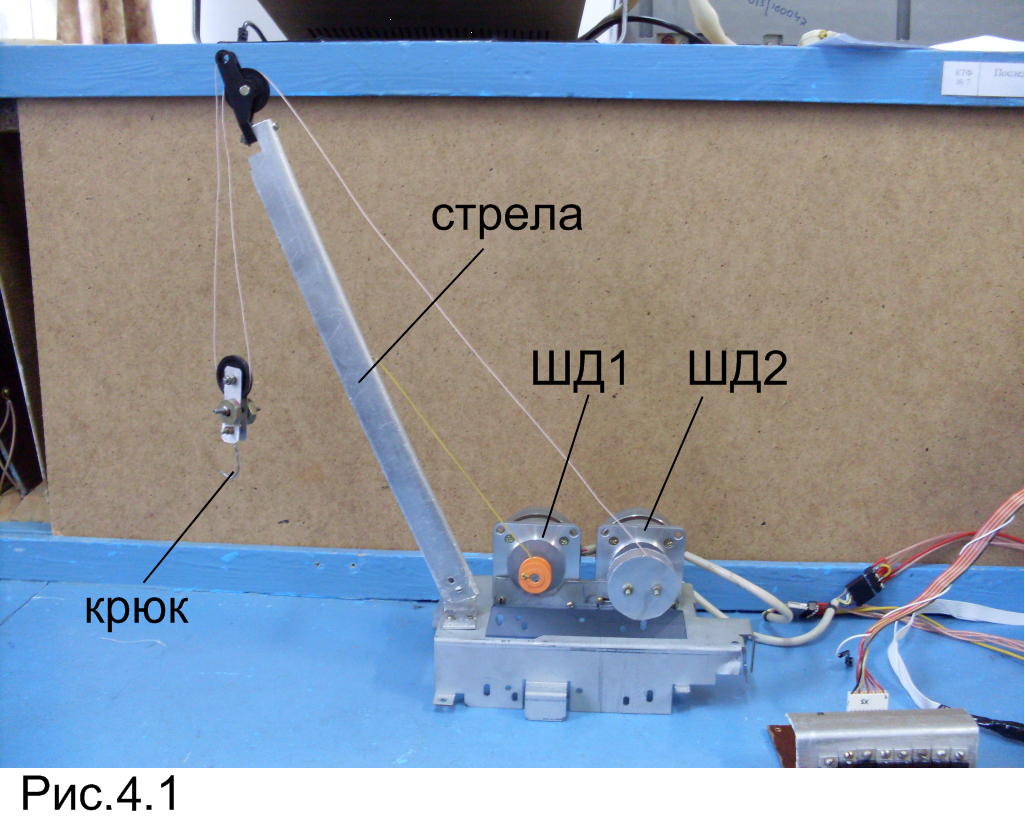 Внешний вид модели
показан на рисунке
4.1. Модель
способна совершать манипуляции с
объектами благодаря двум шаговым
двигателям. ШД 1 управляет положением
стрелы крана. Нить закреплена с одного
конца на стреле крана, и на валу,
приводимого в движение ротором двигателя,
с другого. Подобным образом происходит
управление крючком, с помощью ШД 2.
Внешний вид модели
показан на рисунке
4.1. Модель
способна совершать манипуляции с
объектами благодаря двум шаговым
двигателям. ШД 1 управляет положением
стрелы крана. Нить закреплена с одного
конца на стреле крана, и на валу,
приводимого в движение ротором двигателя,
с другого. Подобным образом происходит
управление крючком, с помощью ШД 2.
Вид на модель сверху показан на рисунке 4.2

4.2 Программа управления краном на языке программирования PureBasic
 Автором
была разработана программа управления
краном. Программа активно работает с
параллельным портом ЭВМ. Информация
выводится через порт, управляя работой
шаговых двигателей модели. Также в
модель встроен датчик, который направляет
информацию о положении стрелы в ЭВМ,
программа эту информацию обрабатывает
и корректирует свою работу.
Автором
была разработана программа управления
краном. Программа активно работает с
параллельным портом ЭВМ. Информация
выводится через порт, управляя работой
шаговых двигателей модели. Также в
модель встроен датчик, который направляет
информацию о положении стрелы в ЭВМ,
программа эту информацию обрабатывает
и корректирует свою работу.
Окно программы представлено на рисунке 4.3. Программа позволяет управлять моделью при помощи кнопок, стрелки указывают на направление перемещения крючка. Для подстройки программы предусмотрено изменение длительности импульсов, управляющих моделью. Реализован режим управления моделью с помощью клавиатуры и мыши. В этом режиме программа отслеживает перемещение мыши, нажатые клавиши на клавиатуре и мыши.
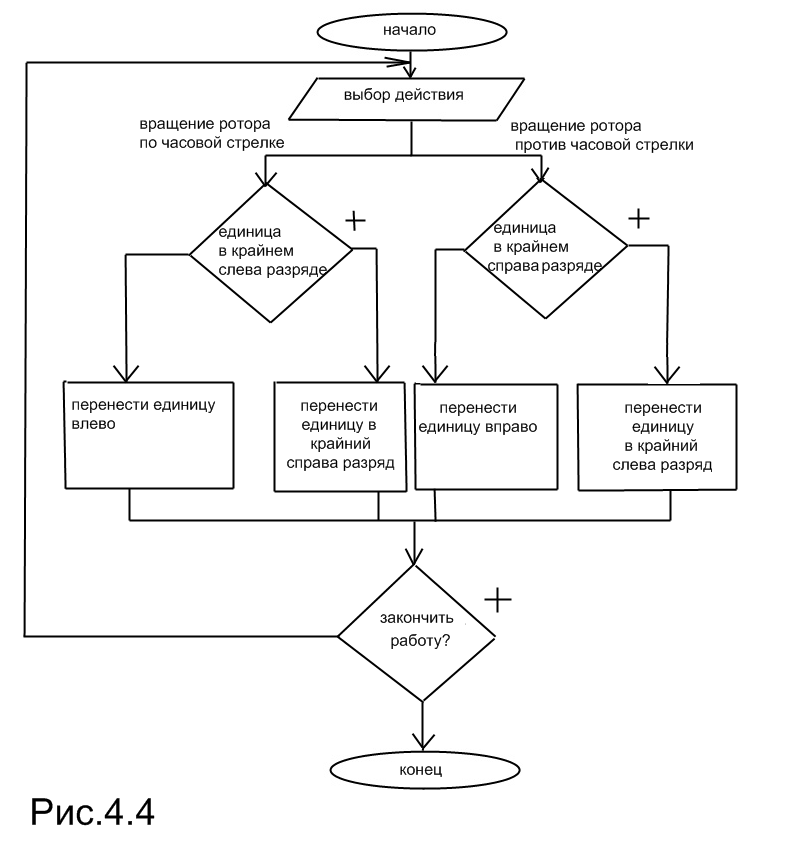
Алгоритм управления шаговыми двигателями модели крана был описан в [1] и показан на рисунке 4.4. Текст программы представлен в приложении 4.
Заключение
Все задачи, поставленные мною, были решены. Цель – достигнута. Была изучена литература, удалось реализовать контроллер для шагового двигателя, а также действующую модель с использованием шаговых двигателей. Автором был создан обучающий видеофильм, который можно использовать в учебных целях.
Данную выпускную квалификационную работу можно использовать как пособие по применению шаговых двигателей, реализации устройств на их основе. Результаты моей работы докладывались на конференциях:
Студенческая научная конференция, КГПИ, 2009 год. Тема доклада: контроллер шагового двигателя. Автор занял первое место среди докладчиков.
II Межрегиональная научная конференция, КГПИ, 2010 год. «Современные аудиовизуальные и информационные технологии в образовании». Тема доклада: разработка учебного видеофильма.
Студенческая научная конференция, КГПИ, 2010 год. Тема доклада: программирование портов в системе программирования PureBasic. Автор занял второе место среди докладчиков.
Список литературы
1. Шевелёв И.В. Управление работой шаговых двигателей с помощью ЭВМ. Статья к студенческой научной конференции, 2009 год.
2. П.Высочанский. Основы языка PureBasic 4.0
3. Шевелёв И.В. Контроллер шагового двигателя. Курсовая работа, 2009 год.
4. Демо-версия языка PureBasic -http://www.purebasic.com/download/PureBasic_Demo.exe
5. О.Шмелёв. Компьютерное управление механизмами измерительной техники – Радио, 2007, №12, стр. 20-22
6. Статья «Контроллер шагового двигателя» - сайт радиолюбителей РАДИОТЕХ www.radiotech.by.ru/Shematic_PCB/Avtomatika/step_motor.htm
7. Статья «Простой контроллер шагового двигателя» http://stepmotor.ru/articles/upravl.php
8. Справочный материал по ШД ДШИ-200 http://www.planar.by/ru/production/sm/dsi200/
9. Лабораторная работа «Использование параллельного порта ЭВМ на практике» ИТФ. КГПИ, кафедра ИиВТ.