

1.4.3 Интегральный показатель качества i2 (квадрат ошибки)
Следующий способ заключается в выборе коэффициентов характеристического полинома из условия минимума среднеквадратической ошибки:
![]() ,
,
здесь
![]() – квадрат сигнала ошибки (разность
входного и выходного сигналов). Данный
критерий позволяет в комплексе
минимизировать такие показатели, как
длительность переходного процесса,
амплитуду и частоту колебаний ошибки,
не гарантируя каких-то заданных значений
для этих характеристик по отдельности.
Ниже приводятся выражения для
характеристических
полиномов
с первого по пятый порядок, полученные
из критерия I2
(расположение корней характеристического
уравнения показано на рис. 4):
– квадрат сигнала ошибки (разность
входного и выходного сигналов). Данный
критерий позволяет в комплексе
минимизировать такие показатели, как
длительность переходного процесса,
амплитуду и частоту колебаний ошибки,
не гарантируя каких-то заданных значений
для этих характеристик по отдельности.
Ниже приводятся выражения для
характеристических
полиномов
с первого по пятый порядок, полученные
из критерия I2
(расположение корней характеристического
уравнения показано на рис. 4):
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
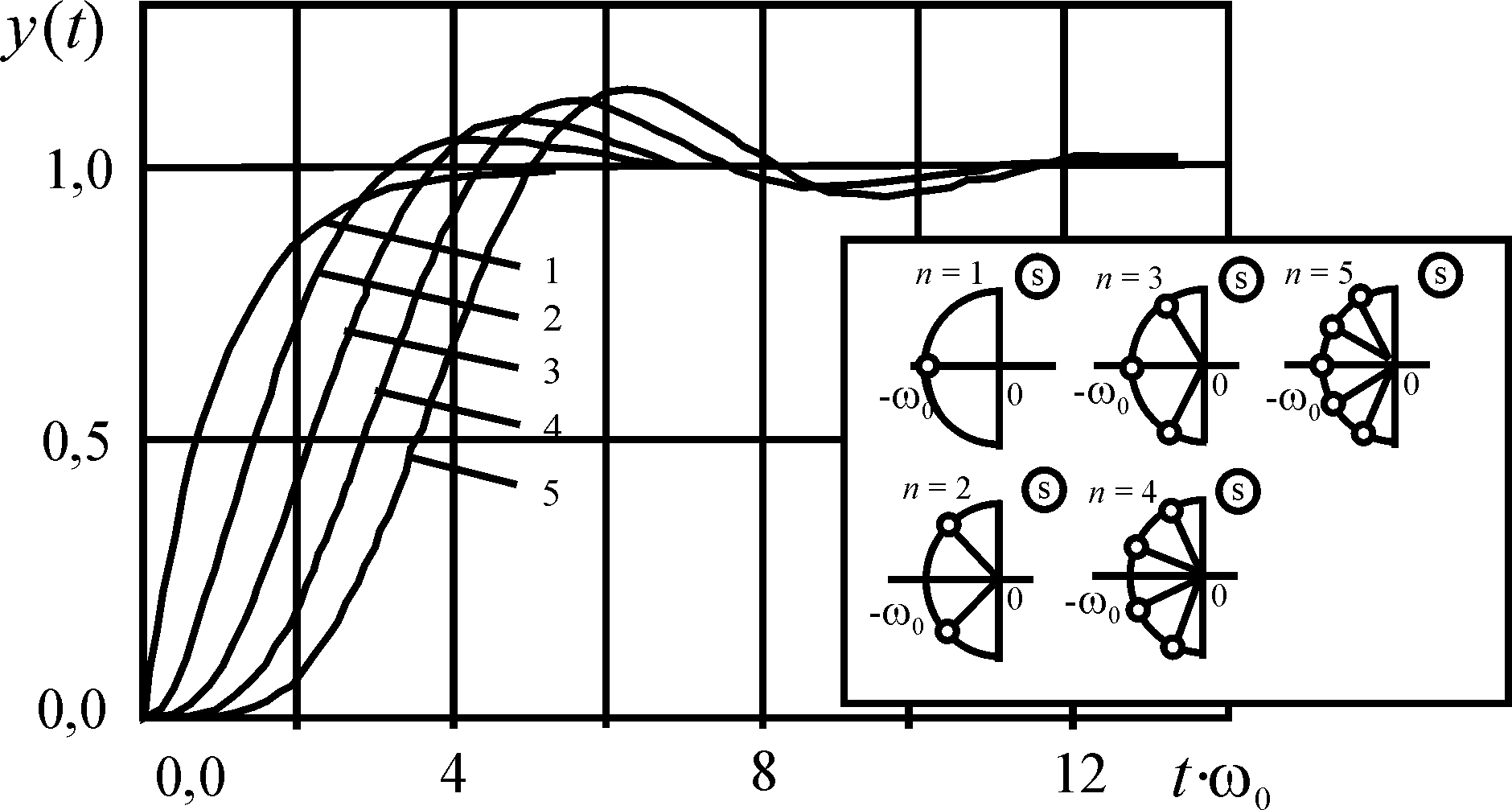
Рис. 3. Расположение корней характеристического уравнения и поведение переходных процессов для схемы Баттерворта
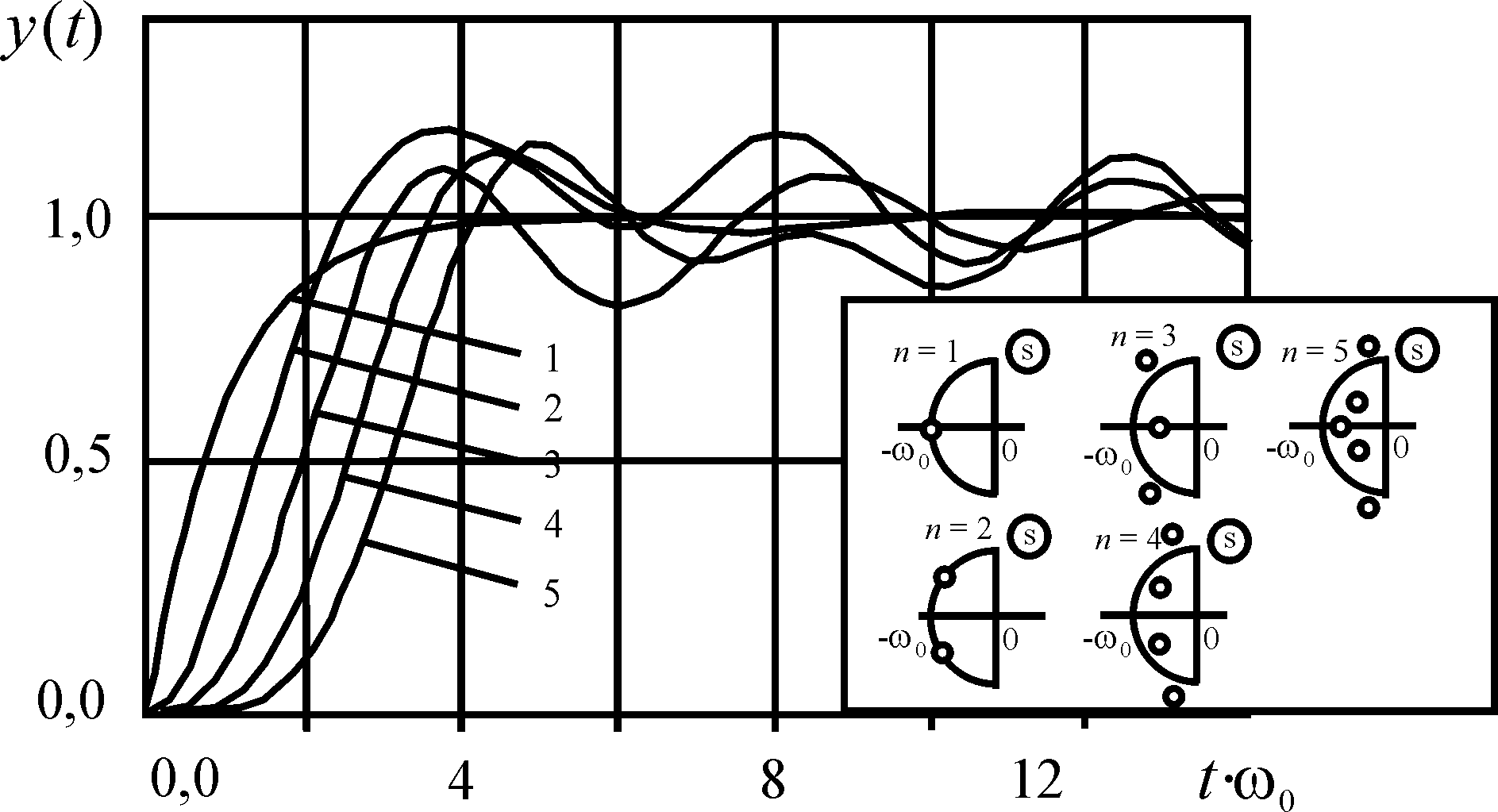
Рис. 4. Расположение корней характеристического уравнения и поведение переходных процессов, минимизирующих критерий I2
Реакция на ступенчатое воздействие системы, оптимизированной по квадратичному критерию (рис. 4), по сравнению с реакцией системы Баттерворта обладает несколько большей колебательностью.
1.4.4 Интегральный показатель качества i3 (абсолютное значение ошибки)
Кроме указанных, известны стандартные формы характеристических полиномов, получающиеся в результате минимизации оптимизирующего функционала
![]() ,
,
представляющего
собой интеграл от произведения абсолютного
значения ошибки
![]() на время
.
Реакции
на ступенчатое воздействие систем,
оптимизированных по данному критерию
(рис. 5), по сравнению с реакциями
биномиальной системы характеризуются
значительно большим быстродействием,
а по сравнению с реакциями систем
Баттерворта - меньшей колебательностью.
Стандартные формы, полученные по данному
критерию, находят достаточно широкое
применение на практике. Однако какого-либо
алгоритма составления этих форм не
существует (они получены эмпирически
с помощью аналоговых моделирующих
установок [5]).
на время
.
Реакции
на ступенчатое воздействие систем,
оптимизированных по данному критерию
(рис. 5), по сравнению с реакциями
биномиальной системы характеризуются
значительно большим быстродействием,
а по сравнению с реакциями систем
Баттерворта - меньшей колебательностью.
Стандартные формы, полученные по данному
критерию, находят достаточно широкое
применение на практике. Однако какого-либо
алгоритма составления этих форм не
существует (они получены эмпирически
с помощью аналоговых моделирующих
установок [5]).
Примеры стандартных полиномов:
,
,
![]() ,
,
![]() ,
,
![]() .
.
Соответствующие расположения корней характеристического уравнения показаны на рис. 5.
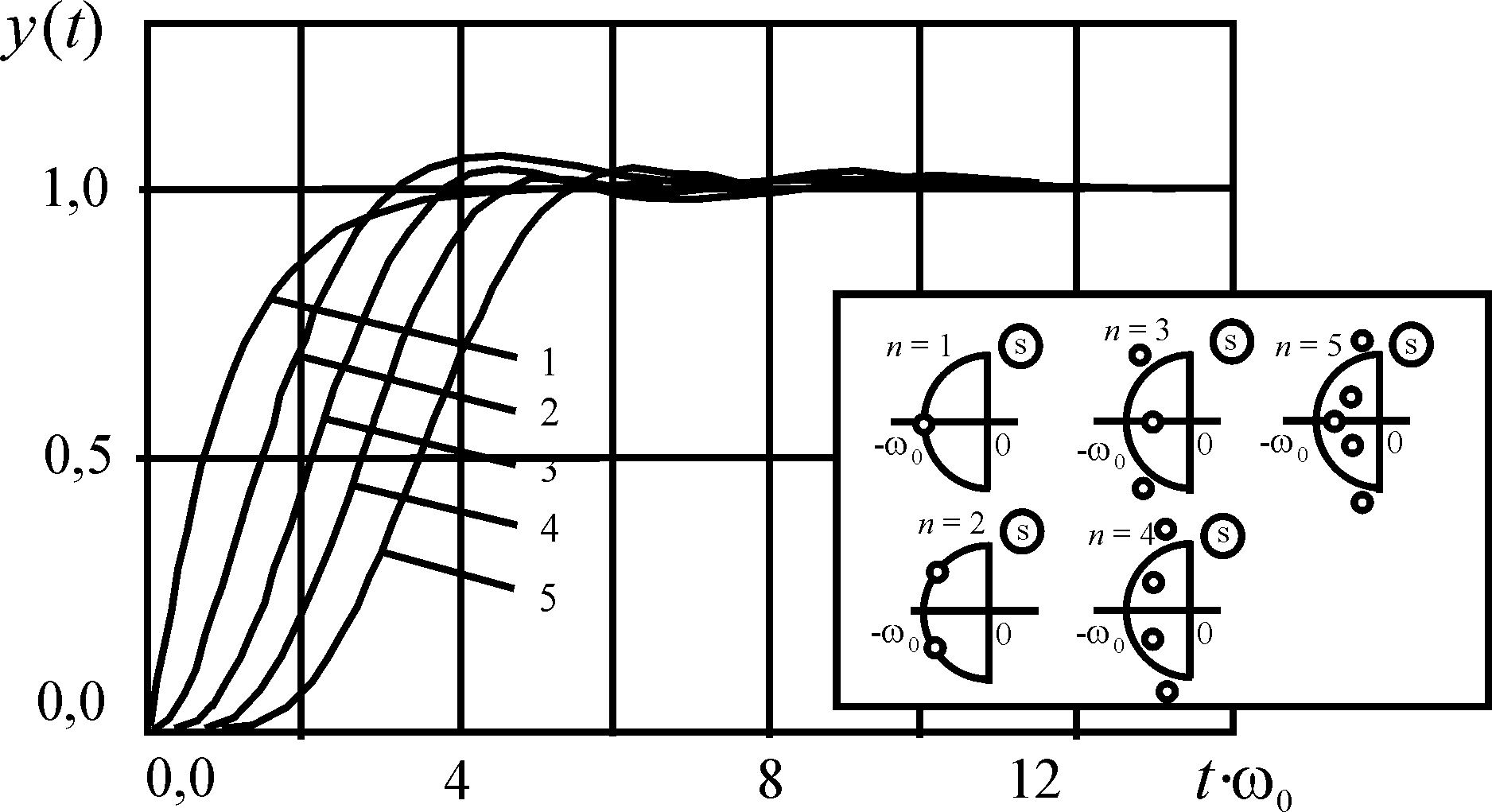
Рис. 5. Расположение корней характеристического уравнения и поведение переходных процессов, минимизирующих критерий I3
Проиллюстрируем методику синтеза модального регулятора на примере.
2 Пример выполнения работы
Для объекта управления, заданного в виде
![]() ,
,
где W(p) – операторная передаточная функция
![]() ,
,
требуется
рассчитать модальный регулятор,
обеспечивающий устойчивость, быстродействие
![]() и коэффициент усиления
и коэффициент усиления
![]() замкнутой системы. При расчетах необходимо
провести сравнительный анализ результатов,
полученных при различных способах
назначения корней характеристического
полинома эталона.
замкнутой системы. При расчетах необходимо
провести сравнительный анализ результатов,
полученных при различных способах
назначения корней характеристического
полинома эталона.
Решение. Объект управления приведем к стандартному операторному виду; переход осуществляется по формуле
,
откуда
операторы
![]() и
и
![]()
![]() ,
,
![]() .
.
Порядок модального регулятора определится по формуле (7):
![]() ,
,
при этом модальный регулятор (2) принимает вид
![]() .
(13)
.
(13)
Матрицы уравнения (8) найдутся по формулам (9) - (11):
 ,
,
![]() ,
,
![]() .
.
Характеристический полином эталона выбирается:
по биномиальной схеме
![]() ;
;
по схеме Баттерворта
![]() ;
;
по интегральному показателю I2
![]() ;
;
по интегральному показателю I3
![]() .
.
Составляя и решая уравнение (8), для каждой схемы в отдельности получаем следующие коэффициенты модального регулятора (13):
1)
![]() ,
,
![]() ,
,
![]() ;
;
2)
![]() ,
,
![]() ,
,
![]() ;
;
3)
![]() ,
,
,
,
![]() ;
;
4)
![]() ,
,
![]() ,
,
![]() .
.
Графики переходных процессов замкнутой системы представлены на рис. 6 (обозначенные цифрами 1, 2, 3 и 4 соответственно).
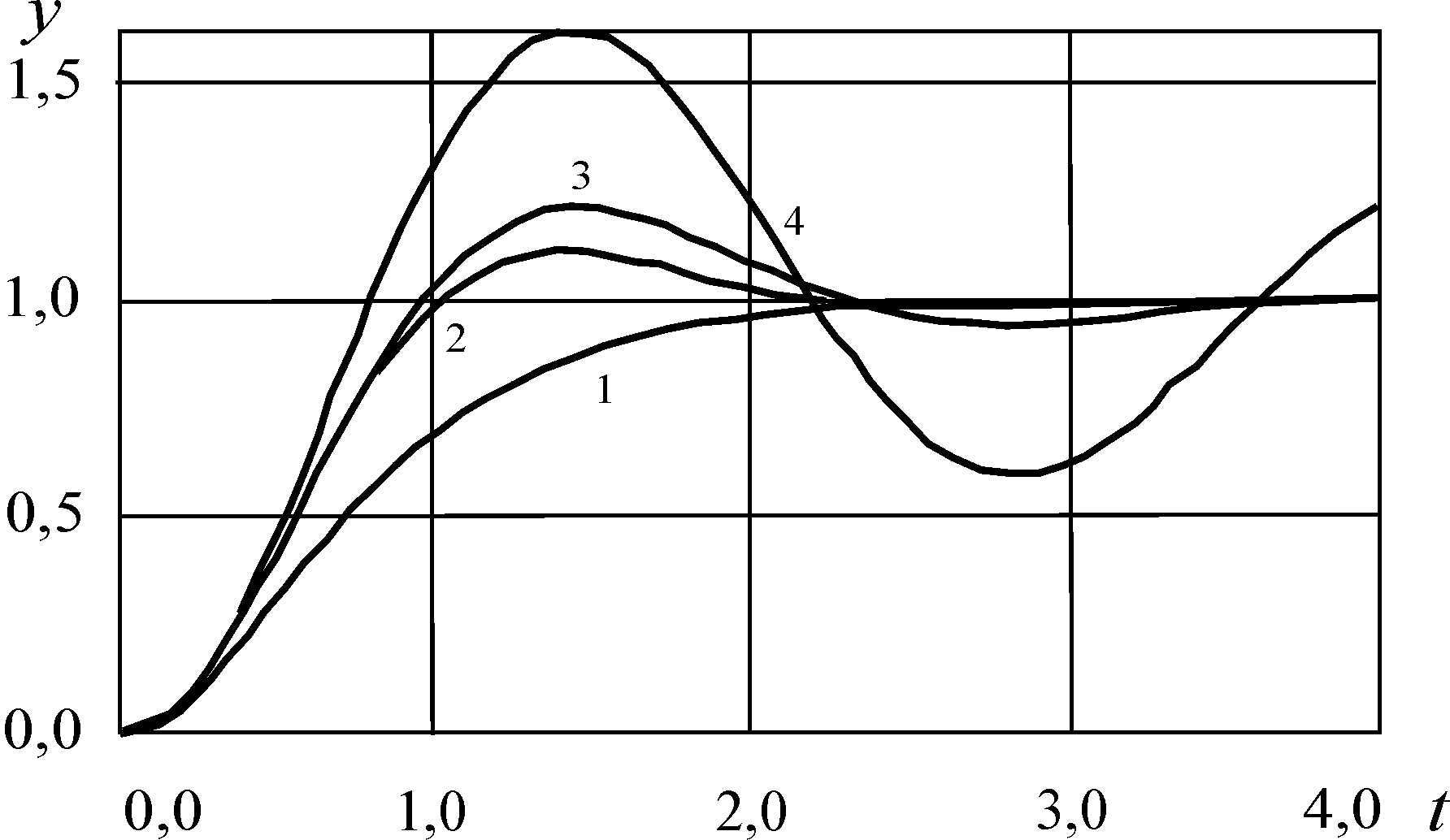
Рис. 6. Переходные процессы при различных схемах выбора эталона
Коэффициент усиления замкнутой системы
![]() ,
,
для всех указанных схем выбора эталона получился одинаковым
![]() ;
;
коэффициент модального регулятора найдется из условия обеспечения заданного коэффициента передачи:
![]() .
.
Подставляя
значения
![]() и
и
![]() в последнее выражение, окончательно
получим
в последнее выражение, окончательно
получим
![]() .
.
Синтез модального регулятора полного порядка закончен.
Из
последнего рисунка следует, что при
использовании биномиальной схемы и
схемы Баттерворта переходный процесс
быстрее устанавливается, причем время
сходимости примерно одинаковое, однако,
во втором случае появляется
перерегулирование. Время переходного
процесса
![]() ,
что существенно превышает оценочное
время переходного процесса
,
что существенно превышает оценочное
время переходного процесса
![]() .
Наихудшие результаты получаются при
использовании распределений, оптимальных
по интегральным показателям качества
(длительная сходимость и высокая
колебательность).
.
Наихудшие результаты получаются при
использовании распределений, оптимальных
по интегральным показателям качества
(длительная сходимость и высокая
колебательность).