

3.1.12 Розрахунок статичних механічних характеристик двигуна.
Механізми, що розглядаються при проектуванні, найчастіше вимагають застосування реверсивного електроприводу і тому (у загальному випадку) механічні характеристики будуються в чотирьох квадрантах. Швидкості прямого і зворотного ходу механізму відрізняються по величині і досягаються різними способами.
Основна характеристика, відповідна робочому ходу, і характеристика зниженої швидкості формуються за рахунок зміни ЕРС перетворювача при номінальному магнітному потоці двигуна. Підвищена швидкість зворотного ходу досягається за рахунок ослаблення магнітного потоку двигуна при ЕРС перетворювача, відповідний основній характеристиці.
Основна характеристика розраховується з умов прямого ходу механізму або іншого руху, при якому виконується корисна робота. Потрібна ЕРС перетворювача
![]() .
(51)
.
(51)
Рівняння механічної характеристики
![]() .
(52)
.
(52)
Механічна характеристика приводу при зворотному ході механізму.
Необхідна величина коефіцієнта
![]() при ослабленні поля визначається із
заданих умов зворотного ходу
при ослабленні поля визначається із
заданих умов зворотного ходу
![]() .
(53)
.
(53)
звідки
![]()
Рівняння механічної характеристики
![]() (54)
(54)
Механічна характеристика приводу на зниженій швидкості
Мінімальна швидкість приводу
![]() ,
(55)
,
(55)
де
![]() - заданий діапазон зміни швидкості.
- заданий діапазон зміни швидкості.
Потрібна ЕРС перетворювача
![]() .
(56)
.
(56)
Момент відповідає умовам режиму зниженої швидкості. Здебільшого це неробочий. холостий хід.
Механічна характеристика
![]() .
(57)
.
(57)
Врахування особливостей механічних характеристик при роботі приводу від керованого випрямляча.
Розраховані механічні характеристики дійсні не у всьому діапазоні зміни моментів і швидкості. Наприклад, при середньому струмі навантаження, меншому деякого граничного, різко зменшується жорсткість характеристик і змінюється швидкість ідеального холостого ходу. Для побудови межі зони безперервних струмів спочатку розраховують ряд значень граничного струму при різних кутах по (48), а потім, використовуючи рівняння балансу напруги, визначають швидкість двигуна, відповідну даним значенням і .
![]() .
(58)
.
(58)
Вираз (58) справедливий як при одно -, так
і при двозонному регулюванні швидкості.
Зону переривистого струму необхідно
побудувати у всіх квадрантах, де
використовуються відповідні
електромеханічні характеристики з
урахуванням значення коефіцієнта
![]() .
.
3.1.13 Розрахунок параметрів і характеристик перетворювача.
У загальному випадку вихідна ЕРС тиристорного перетворювача
![]() .
(59)
.
(59)
Приклад регулювальної характеристики тиристорного перетворювача представлений на рис. 3.1.
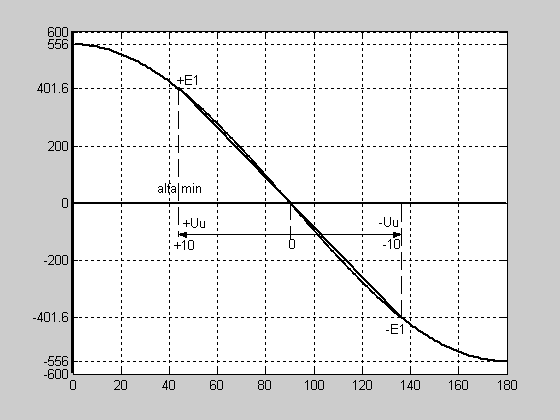
Рис. 3.1 - Регулювальна характеристика перетворювача тиристора.
У перехідних процесах ЕРС перетворювача
тиристора змінюється в діапазоні від
![]() =0,
якщо
= 90° до
=0,
якщо
= 90° до
![]() при прямому ході механізму, коли
при прямому ході механізму, коли
![]() ,
(60)
,
(60)
де визначається по (57).
У визначеному таким чином діапазоні регулювання косинусоидальная характеристика лінеаризується прямою і тоді коефіцієнт передачі силової частині перетворювача
![]() .
(61)
.
(61)
Зміна кута управління тиристорів в
необхідному діапазоні 90-![]() повинна відповідати пропорційній зміні
напруги управління від нуля до 10 В.
Напруга управління
повинна відповідати пропорційній зміні
напруги управління від нуля до 10 В.
Напруга управління
![]() перетворюється в кут керування тиристорами
у спеціальній схемі, що має назву система
імпульсно-фазового керування (СІФК),
причому коефіцієнт передачі
перетворюється в кут керування тиристорами
у спеціальній схемі, що має назву система
імпульсно-фазового керування (СІФК),
причому коефіцієнт передачі
![]() .
(62)
.
(62)
Повний коефіцієнт передачі перетворювача тиристора
![]() (63)
(63)
Використовуючи отримані коефіцієнти передачі, визначають необхідні значення напруги управління на вході СІФК і кути включення тиристорів для кожної механічної характеристики, що отримується зміною ЕРС перетворювача.
У динаміці інерційність силової частини перетворювача і СІФК враховується введенням еквівалентної постійної часу
![]() .
(64)
.
(64)
де
![]() - період напруги живлячої мережі, s.
- період напруги живлячої мережі, s.
Часто
![]() виявляється значно менше інших
інерційностей, наприклад ланцюга якорю,
або механічною. Крім того, вплив
на перехідні процеси зменшується із-за
застосування задатчиків інтенсивності.
У подібних випадках даною постійною
часу нехтують.
виявляється значно менше інших
інерційностей, наприклад ланцюга якорю,
або механічною. Крім того, вплив
на перехідні процеси зменшується із-за
застосування задатчиків інтенсивності.
У подібних випадках даною постійною
часу нехтують.