

Дискретизация изображения по координатам и уровню яркости
Сигнал, получаемый с устройства ввода изображения, является дискретным как по координатам х,у так и по градациям яркости (глубине оттенков серого).
Ошибка, связанная с разрешением камере по глубине оттенков серого, возникает при оцифровке непрерывного сигнала. Другими словами, вместо истинного непрерывного распределения интенсивности I имеем дискретные значения I. Для оценки ошибки определения значений I, моделировалась непрерывное гауссово распределение I:
![]() . (2.58)
. (2.58)
Здесь d
– диаметр моделируемого пучка в
перетяжке. Затем полученное распределение
оцифровывалось в пределах от 0 до
![]() (рис.
2.12).
(рис.
2.12).

График зависимости ошибки определения диаметра лазерного пучка от количества уровней квантования сигнала представлен на рис.2.13. Оказалось, что 10-ти и 12-ти битное квантование сигнала по сравнению с 8-ми битным приводит лишь к незначительному увеличению точности определения диаметра пучка (таблица 2.1)

Уровни квантования сигнала у.е
Рис. 2.13 Зависимость ошибки измерений от количества уровней сигнала
Ошибка определения диаметра пучка от пространственного разрешения должен исследоваться в совокупности с зависимостью от дискретности сигнала по градациям яркости. Согласно [130] для матричных детектирующих систем , к которым относятся ПЗС-камеры, пространственное разрешение должно составлять по крайней мере 1/20 диаметра. Зависимость ошибки распределения диаметра пучка от пространственного разрешения камеры при 8-ми битном квантовании сигнала представлена на рис. 2.14. Как видно из графика, если изменяемый пучок занимает на ПЗС-камере площадь не менее 20х20 пикселей, конечное пространственное разрешение ПЗС-камеры не вносит существенных ошибок в результаты измерений. Дальнейшее увеличение пространственного разрешения к улучшению сигналов не приводит (рис. 2.14).
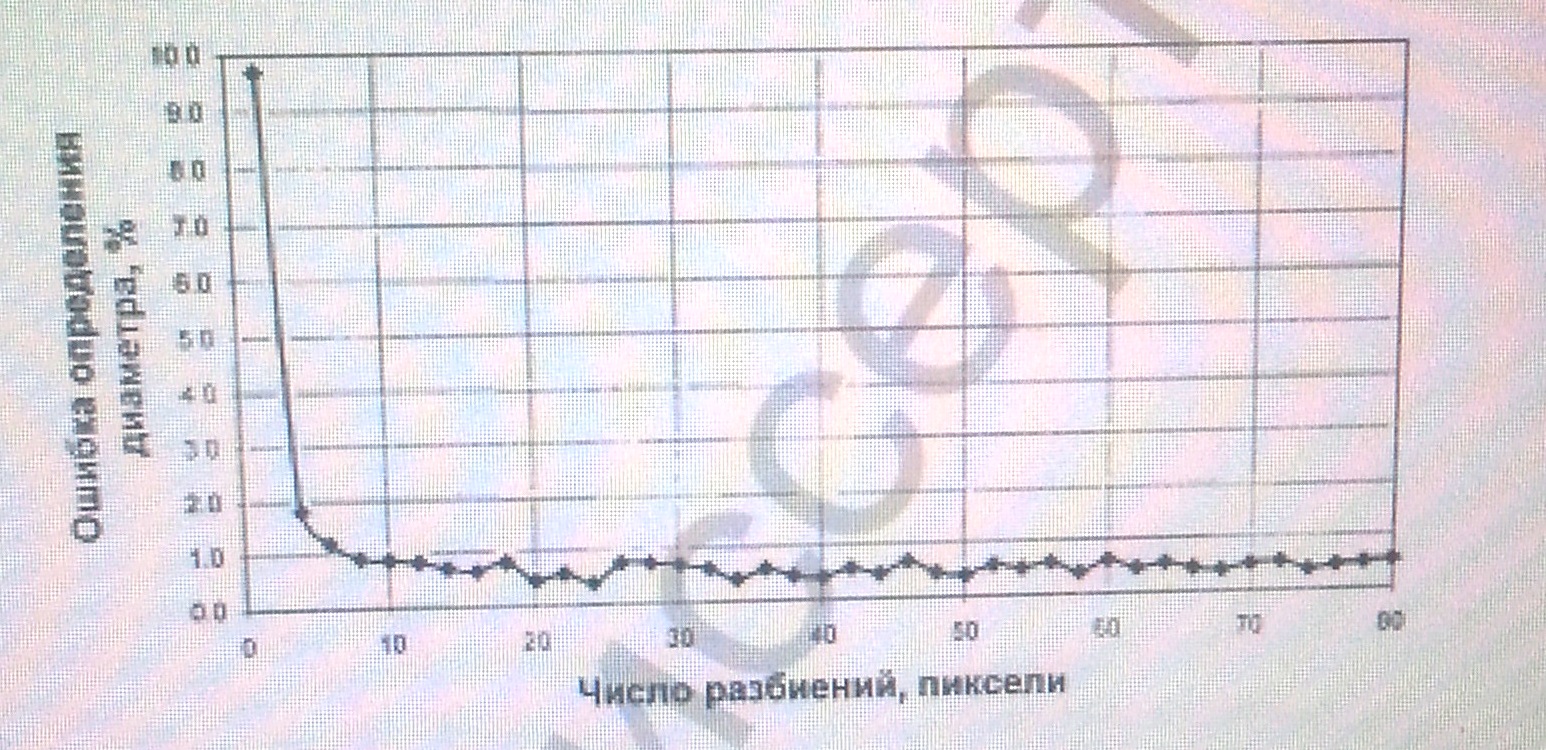
Рис. 2.14. Зависимость ошибки измерений от пространственного разрешения для 256 градаций серого.
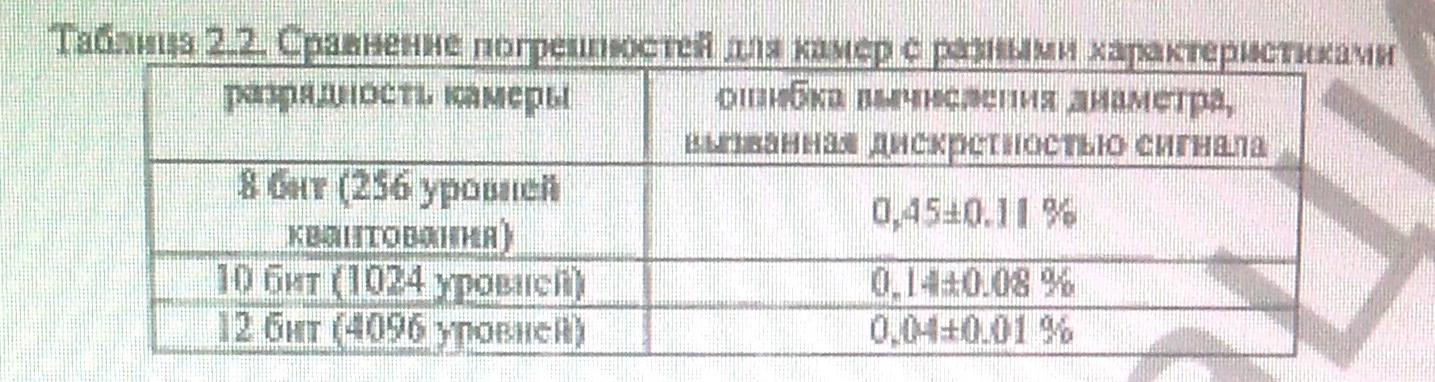
Проведенные исследования показали, что в случае, когда измеряемый пучок занимает на ПЗС-камере площадь не менее 20х20 пикселей, измерение 8-ми битной ПЗС-камеры приводит к ошибке в определении диаметра пучка 0,45±0,11%. Это почти на порядок выше, чем при применении 12-ти битной камеры (таблица 2.2). Таким образом, 8-ми битная камера обеспечивает удовлетворительную точность, однако для повышения достоверности результатов могут использоваться камеры с большим пространственным разрешением.
Размер и положение площадки интегрирования при определении вторых моментов интенсивности.
Для вычисления диаметра пучка используются моменты второго порядка, которые могут быть вычислены на основе измеренные распределений интенсивности с использованием выражения (2.15).
При неоправданном увеличении площадки интегрирования может доминировать шум, поэтому в ряде случаев решающую роль в получении достоверных результатов играет правильный выбор площадки интегрирования.
На рис.2.15 представлен график зависимости ошибки определения диаметра лазерного пучка от размера площадки интегрирования (в % от диаметра пучка). Ошибка стремится к нулю в случае, когда размер площадки интегрирования составляет 270% от диаметра пучка. Таким образом, площадка интегрирования должна иметь размер в три раза больше диаметра пучка.
Интегрирование выполняется по прямоугольной площадке, в центре которой расположен пучок. Площадка интегрирования расположена перпендикулярно оси распространения пучка. Поскольку координаты центра пучка, ориентация осей и диаметра пучка априорно неизвестны, то процедура начинается с некоторого приближения области интегрирования, которое используется для расчетов. По новой области пересчитываются значения диаметра пучка, его ориентация и положения. Эта процедура повторяется до тех пор, пока результаты измерений в пределах точности не будут совпадать друг с другом.