

2.5 Движение главной оси гирокомпаса при маневрировании судна. Условие апериодического перехода
Как было установлено ранее, всем гирокомпасам присуща скоростная девиация. Методы ее коррекции могут быть различны и точность последней зависит от точности знания параметров движении судна и широты его места. По этой причине скоростная девиация не может явиться показателем качества гирокомпаса, а именно, его точностных характеристик.
Совершенно иначе обстоит дело с влиянием маневрирования судна на ГК. Именно в зависимости от этого влияния определяется действительный класс его точности.
Под маневром судна условимся понимать изменение его скорости, курса или того и другого одновременно. В любом из этих случаев у основания гирокомпаса появляется линейное ускорение, которое передается точке подвеса чувствительною элемента. Имеющиеся исследования показывают, чти наиболее сильное воздействие на чувствительный элемент гирокомпаса оказывает составляющая линейного ускорения, действующая вдоль меридиана
Д ля
простоты рассуждений представим, что
судно совершает маневр изменением
скорости (пусть скорость увеличивается
от малою хода вперед до полного) вдоль
меридиана в северном направлении. Будем
считать, что до начала маневра ось Х-Х
чувствительного элемента располагалась
в положении равновесия, т.е. в плоскости
компасного меридиана, отклоненного от
истинною меридиана на угол скоростной
девиации
ля
простоты рассуждений представим, что
судно совершает маневр изменением
скорости (пусть скорость увеличивается
от малою хода вперед до полного) вдоль
меридиана в северном направлении. Будем
считать, что до начала маневра ось Х-Х
чувствительного элемента располагалась
в положении равновесия, т.е. в плоскости
компасного меридиана, отклоненного от
истинною меридиана на угол скоростной
девиации
![]() .
.
Н
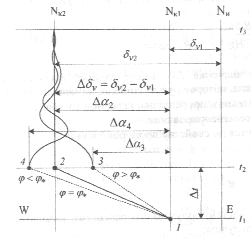
Рис. 2.17 Инерционное смещение главной
оси ЧЭ![]() направлено к NК. Значит, и гиросфера
будет испытывать ускорение, вектор
которого приложен к центру ее массы -
точке О.
направлено к NК. Значит, и гиросфера
будет испытывать ускорение, вектор
которого приложен к центру ее массы -
точке О.
Сила инерции
![]() вызванная ускорением
вызванная ускорением
![]() приложена также к центру массы ЧЭ, всегда
направлена в сторону, противоположную
ускорению равна по величине (в соответствии
со вторым законом Ньютона):
приложена также к центру массы ЧЭ, всегда
направлена в сторону, противоположную
ускорению равна по величине (в соответствии
со вторым законом Ньютона):
![]() ,
где m - масса ЧЭ.
,
где m - масса ЧЭ.
Расстояние
![]() (метацентрическая высота) от точки
подвеса гиросферы О до точки G
является плечом действия силы
(метацентрическая высота) от точки
подвеса гиросферы О до точки G
является плечом действия силы
![]() вокруг оси Y-Y ЧЭ, следовательно, создается
момент этой силы
вокруг оси Y-Y ЧЭ, следовательно, создается
момент этой силы
![]()
или
![]()
где
![]() - максимальный момент силы тяжести ЧЭ
или модуль маятникового момента.
- максимальный момент силы тяжести ЧЭ
или модуль маятникового момента.
Момент внешней силы (силы инерции)
![]() ,
располагается на оси У-У (так, чтобы из
конца вектора
действие силы
усматривалось против часовой стрелки)
и вызывает прецессию ЧЭ вокруг оси Z-Z.
- H стремится к
в горизонтальной плоскости кратчайшим
путем.
,
располагается на оси У-У (так, чтобы из
конца вектора
действие силы
усматривалось против часовой стрелки)
и вызывает прецессию ЧЭ вокруг оси Z-Z.
- H стремится к
в горизонтальной плоскости кратчайшим
путем.
Прецессионной движение ЧЭ, возникающее под действием момента сил инерции. называется инерционной прецессией. Угловая скорость этого движения в соответствии с известной формулой
![]()
Вследствие инерционной прецессии,
которая будет иметь место только в
течение времени маневра
![]() (а мосле окончании маневра прекращается)
главная ось ЧЭ переместится в горизонтальном
направлении на некоторый угол
(а мосле окончании маневра прекращается)
главная ось ЧЭ переместится в горизонтальном
направлении на некоторый угол
![]()
 , (2.6)
, (2.6)
так как ускорение
![]() есть изменение скорости судна
есть изменение скорости судна
![]() за время
вдоль
меридиана от начала маневра в
за время
вдоль
меридиана от начала маневра в
![]() до его окончания в
до его окончания в
![]() .
.
Знак минус означает, что инерционное
перемещение происходит к западу. После
завершения маневра вектор H кинетического
момента ЧЭ укажет новое положение
компасного меридиана
![]() .
.
У
Рис. 2.18 Апериодический переход и девиация
первого рода