

2.9 Снижение влияния девиации на качке
Из предшествующего материала установлено,
что погрешность качки вызывается
вертикальной составляющей момента
,
вводимого силой инерции
.
Составляющая
,
появляется вследствие раскачивания ЧЭ
вокруг его главной оси силой
![]() .
Следовательно, для предупреждения
необходимо стабилизировать ось Y-Y
прибора так, чтобы оyа все
время оставалась горизонтальной. Именно
на этом и основан метод предупреждения
возникновения погрешности
у ГК с чувствительным элементом, имеющим
пониженный центр тяжести.
.
Следовательно, для предупреждения
необходимо стабилизировать ось Y-Y
прибора так, чтобы оyа все
время оставалась горизонтальной. Именно
на этом и основан метод предупреждения
возникновения погрешности
у ГК с чувствительным элементом, имеющим
пониженный центр тяжести.
Для этого чувствительный элемент состоит
не из одного гироскопа, а из двух
совершенно одинаковых гироскопов,
имеющих между собой кинематическую
связь. Роторы гироскопов подбираются,
насколько это возможно, одинаковыми и
располагаются так, что векторы их
кинетических моментов
![]() и
и
![]() образуют с главной осью гиросферы Х-Х
одинаковые углы, в среднем положении
равные 45°, а между собой - 90° (рис 2.29, а -
вид гиросферы сверху).
образуют с главной осью гиросферы Х-Х
одинаковые углы, в среднем положении
равные 45°, а между собой - 90° (рис 2.29, а -
вид гиросферы сверху).

Рис. 2.29 Гиросфера и ее кинетический момент
Гирокамеры, в которых заключены гироскопы, связаны между собой механизмом, устроенным следующим образом. К гирокамерам 1 жестко прикреплены кронштейны 2, обращенные в противоположные стороны. Кронштейны соединены шарнирной тягой 3, цапфы которой входят я подшипники кронштейнов. Шарнирная тяга, в свою очередь, связана с корпусом гиросферы при помощи двух пружин 4, эти пружины устанавливают гироскопы так, что их главные оси образуют между собой угол 90°.
Относительно гиросферы гироскопы могут поворачиваться одновременно только вокруг их вертикальных осей в противоположные стороны и на одинаковые углы, при этом пружины 4 будут растягиваться. Поворот же гироскопов в одинаковом направлении ограничен жесткостью шарнирной тяги 3.
Для уяснения принципа предупреждения возникновения погрешности качки расположим гироскопы несколько иначе (рис. 2.29,6).
Если разложить вектора
и
![]() на составляющие по осям гиросферы, то
видно, что составляющие
на составляющие по осям гиросферы, то
видно, что составляющие
![]() направлены в противоположные стороны
и компенсируют друг друга. Составляющие
направлены в противоположные стороны
и компенсируют друг друга. Составляющие
![]() одинаковы по величине и направлению,
поэтому кинетический момент гиросферы
одинаковы по величине и направлению,
поэтому кинетический момент гиросферы
![]() .
То есть, двухгироскопный ЧЭ можно
рассматривать как одногироскопный с
.
То есть, двухгироскопный ЧЭ можно
рассматривать как одногироскопный с
![]() .
На этом основании линию, определяемую
вектором
.
На этом основании линию, определяемую
вектором
![]() ,
и называют главной осью гиросферы. Если
гиросфера находится в положении
равновесия, то ее главная ось X-X совпадает
с гирокомпасным меридианом.
,
и называют главной осью гиросферы. Если
гиросфера находится в положении
равновесия, то ее главная ось X-X совпадает
с гирокомпасным меридианом.
Сила
(см. рис. 2.27), возникающая при качке судна,
стремится повернуть гиросферу вокруг
оси Х-Х, причем направление этой силы
меняется через каждые полпериода качки.
Момент
![]() ,
создаваемый силой
,
располагается на главной оси Х-Х и также
меняет свое направление каждые полпериола
(рис. 2.30, а и рис. 2.30, б соответственно).
,
создаваемый силой
,
располагается на главной оси Х-Х и также
меняет свое направление каждые полпериола
(рис. 2.30, а и рис. 2.30, б соответственно).
Согласно свойству прецессии гироскопы начнут поворачиваться вокруг вертикальных осей - и стремятся к по кратчайшему пути (на рисунке показано стрелками), что приведет к растягиванию пружин антипараллелограммного механизма.
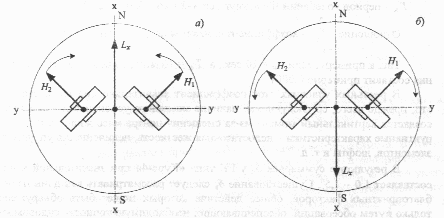
Рис. 2.30. Прецессионное движение гироскопов внутри гиросферы
Противодействующая сила пружин создаст моменты, направленные по вертикальным осям гироскопов. В первый полупериод качки (рис. 2.30, а) момент, передаваемый правому гироскопу, будет направлен вверх, а левому - вниз. Во втором полупериоде качки (рис. 2.30, б) направление моментов изменится на противоположное.
Монеты пружин уравновешиваются гироскопическими моментами гироскопов. Благодаря этому гиросфера приобретает значительную динамическую инерцию в плоскости Е – W, в чем и проявляется стабилизирующее действие гироскопов.
Таким образом, вместо того, чтобы разворачивать гиросферу вокруг главной оси N-S, сила инерции будет вызывать прецессионное движение гироскопов вокруг их вертикальных осей то в одну, то в другую сторону.
Итак, ось Y-Y двухгироскопного ЧЭ при качке судна остается горизонтальной, а это значит, что составляющая отсутствует и погрешность качки не возникает.
Ось Y-Y горизонтальна в идеальном случае.
Возникающие моменты сил упругости
пружин вызывают периодический крен оси
Y-Y с периодом
![]() ,
составляющим
,
составляющим
![]() 15 мин.
15 мин.
В результате показания гирокомпаса при качке искажены некоторой погрешностью
![]()
где - погрешность качки одногироскопного компаса;
![]() - период качки;
- период качки;
- период колебаний ЧЭ вокруг оси X-X (колебания оси Y-Y).
Отношение
![]() - коэффициент снижения погрешности
качки.
- коэффициент снижения погрешности
качки.
Так, к примеру, если = 10 сек., а = 16 мин., то коэффициент снижения составит примерно 0,0001.
В реальных условиях этот коэффициент значительно больше и связано это, прежде всего, со следующим: наличие масляного успокоителя - все таки, создается вертикальный момент из-за смещения центра масс жидкости; конструктивные характеристики - недостаточная жесткость, нелинейность упругости элементов, люфты и т. д.
В результате суммарная у ГК типа «Курс-4» при значительной качке составляет 1,0 - 1,5. Существование следует рассматривать как один из неблагоприятных факторов, общее действие которых может быть обнаружено только путем обсерваций, обеспечивающих необходимую точность судовождения.
Вопросы для самоконтроля
Что показывают горизонтальная и вертикальная составляющие суточного вращения Земли?
Сформулируйте принцип использования гироскопа в качестве курсоуказателя морского судна.
Перечислите методы превращения гироскопа в гирокомпас.
В чем заключается суть метода горизонтального момента.
Объясните почему у жидкостного успокоителя диаметр соединяющей трубки сосудов и вязкость жидкости подбирается таким образом, чтобы колебания жидкости запаздывали по фазе на ¼ периода относительно колебаний самих сосудов при равенстве их периодов.
Проведите анализ зависимости (2.1), определяющей координаты положения равновесия оси прибора при затухающих колебаниях.
Проанализируйте зависимость (2.5), выражающей величину скоростной девиации.
Что такое «апериодический переход» оси гирокомпаса и в чем заключается суть условия М. Шулера?
Раскройте суть инерционной девиации первого и второго рода.
Проанализируйте зависимость (2.13), выражающей величину интеркардинальной девиации.
Объясните суть метода снижения влияния девиации на качке.