

Расчетная схема замещения
Для расчета режимов работы трансформатора как элемента электрической цепи (определения токов и напряжений при различной нагрузке), нужна расчетная математическая модель. Она должна быть достаточно простой, но одновременно должна позволять с необходимой точностью определять основные электрические параметры трансформатора. Проще всего эту модель строить на основе расчетной схемы замещения трансформатора.
Для рассмотренного выше идеального трансформатора эта схема содержит в первичной обмотке источник питающего напряжения и источник индуцированной ЭДС, а во вторичной – источник индуцированной ЭДС и приемник. Схема приведена на рис. 5.
Рис. 5. Схема замещения идеального трансформатора
Для неидеального трансформатора необходимо учесть нагрев проводников обмоток и ЭДС (индуктивностей) от потоков рассеяния. В результате схема замещения идеализированного трансформатора примет вид, показанный на рис. 6.

Рис. 6. Схема замещения идеализированного трансформатора
Для схемы рис. 6 можно записать уравнения по второму закону Кирхгофа
![]() ,
,
![]() .
.
Наличие магнитной связи в схеме усложняет расчет. Поэтому с помощью эквивалентных преобразований магнитную связь можно заменить гальванической (то есть связь посредством токов). Для этого нужно левую и правую часть уравнения вторичной обмотки умножить на коэффициент трансформации (n1/n2):
![]() .
.
Здесь ![]() .
.
Важно, что после преобразования в уравнение входит такая же ЭДС e10(t), как и в первичной обмотке. Введем следующие обозначения:
(5)![]()
 ,
,
![]() ,
,
 ,
,
 .
.
Величины со штрихами, относящиеся к вторичной катушке, называются «приведенные к первичной обмотке», например, i¢2(t) – приведенный ток, L¢2– приведенная индуктивность от потока рассеяния и т.п.
Теперь уравнения "приведенного трансформатора" примут вид:
![]() ,
,
![]() .
.
Э ти
уравнения справедливы при любых
напряжениях питания u1(t).
Для синусоидального напряжения в
комплексном виде (используем символический
метод) эти уравнения можно записать
так:
ти
уравнения справедливы при любых
напряжениях питания u1(t).
Для синусоидального напряжения в
комплексном виде (используем символический
метод) эти уравнения можно записать
так:
(6)![]()
![]()
Последнее слагаемое в этих уравнениях может рассматриваться как индуктивное сопротивление, в котором ток равен сумме тока первичной и приведенного тока вторичной обмотки. Этим уравнениям соответствует расчетная схема замещения приведенного трансформатора рис. 7. Эта схема используется для расчетов токов и напряжений в различных режимах работы трансформатора: холостого хода, режима нагрузки и короткого замыкания.

Рис. 7. Расчетная схема замещения приведенного трансформатора
С
(7)
![]() и
и
![]() .
.
Эти условия позволяют рассчитывать параметры трансформатора по каталожным данным.
Каталожные данные трансформаторов
Для
уменьшения массогабаритных показателей
катушки трансформаторов помещают на
замкнутый ферромагнитный сердечник
(его называют "магнитопровод"). При
этом магнитный поток, вообще говоря,
зависит от тока нелинейно
![]() ,
поскольку магнитное сопротивление
ферромагнетика существенно зависит от
тока (с учетом гистерезиса). Эта
нелинейность приводит к нагреву
сердечника при его перемагничивании,
то есть возникают потери энергии на
нагрев сердечника. Для учета этих потерь
в схему замещения добавляют активное
сопротивление Rm,
включенное параллельно индуктивному
сопротивлению взаимной индукции
(×n12×M).
,
поскольку магнитное сопротивление
ферромагнетика существенно зависит от
тока (с учетом гистерезиса). Эта
нелинейность приводит к нагреву
сердечника при его перемагничивании,
то есть возникают потери энергии на
нагрев сердечника. Для учета этих потерь
в схему замещения добавляют активное
сопротивление Rm,
включенное параллельно индуктивному
сопротивлению взаимной индукции
(×n12×M).
Каталожными называются номинальные (то есть, на которые трансформаторы проектируются) данные трансформаторов и данные опытов холостого хода и короткого замыкания.
К номинальным данным относятся:
номинальное первичное U1ном и номинальное вторичное U2ном напряжения (их действующие значения);
для трехфазных трансформаторов приводится схема соединения фаз первичной и вторичной обмоток (в звезду, в треугольник).
номинальная полная мощность Sном;
массогабаритные показатели (в расчетах режимов работы массогабаритные показатели не используются)
К каталожным данным относятся:
номинальные данные (см. выше);
напряжение короткого замыкания uК%
 ;
;ток холостого хода IXX%
 ;
;мощность потерь холостого хода Р0;
мощность потерь короткого замыкания РК.
На основе схемы рис. 7 можно получить основные расчетные соотношения, включающие номинальные и каталожные данные трансформаторов.
Режим холостого хода
Это режим работы трансформатора при разомкнутой вторичной обмотке, то есть при i2(t) = 0.
На рис. 8 приведена схема трансформатора в режиме холостого хода.

Рис. 8. Схема замещения приведенного трансформатора в режиме холостого хода
Уравнения трансформатора в режиме холостого хода:
![]()
![]()
Переходя от комплексных чисел к модулям, получим:
![]() ;
;![]()
Отсюда можно найти
(8)
Сопротивление xm называется индуктивным сопротивлением от общего магнитного потока.
Номинальный ток может быть определен по номинальным данным с помощью формул:
д
(9а)![]() ,
,
д
(9)![]() .
.
Мощность потерь холостого хода определяет в основном нагрев ферромагнитного сердечника трансформатора и не влияет на основные электрические параметры схемы замещения трансформатора и поэтому в расчетах, как правило, не используется.
Если требуется учесть потери энергии на нагрев сердечника, то сопротивление Rm можно рассчитать по формуле:
![]() .
.
Опыт короткого замыкания
Это режим работы трансформатора при пониженном напряжении первичной катушки и при замкнутой вторичной обмотке накоротко, то есть при u2(t) = 0. При этом к первичной обмотке трансформатора подводится напряжение, которое называется "напряжение короткого замыкания". Оно выбирается так, чтобы в обмотках были номинальные токи.
На рис. 9,а приведена схема замещения трансформатора не в опыте, а в режиме короткого замыкания, когда напряжение питания не понижено, а равно номинальному. Такой режим является аварийным, поскольку токи в обмотках во много раз могут превысить номинальные и трансформатор может выйти из строя из-за перегрева.
На рис. 9,б приведена схема замещения трансформатора в опыте короткого замыкания, когда напряжение питания равно такому напряжению короткого замыкания, при котором токи в обмотках равны номинальным.
На рис. 9,в приведена расчетная схема замещения трансформатора в опыте короткого замыкания, где учтены приближенные равенства (7).
Уравнения в режиме короткого замыкания имеют вид:
![]() ,
,
![]() .
.
Отсюда
![]()
и
![]() .
.
Рис. 9. Схема замещения трансформатора в режиме (а) и опыте (б) короткого замыкания, расчетная схема замещения в опыте короткого замыкания (в)
По каталожным данным в опыте короткого замыкания можно найти:
(10)
 ,
,
 ,
,
![]()
Таким образом, соотношения (8 – 10) позволяют определить параметры элементов расчетной схемы замещения трансформатора по каталожным данным. Знание параметров элементов схемы замещения позволит рассчитать любой режим работы трансформатора: от холостого хода до короткого замыкания.
Пример расчета трансформатора
Требуется определить параметры расчетной схемы замещения мощного трехфазного трансформатора ТСЗ-630/10, имеющего следующие каталожные данные:
- номинальная мощность трансформатора SHOM = 630 кВА;
- номинальное напряжение обмотки высшего напряжения (ВН) U1ном = 10,5 кВ;
- номинальное напряжение обмотки низшего напряжения (НН) U2ном = 0,4 кВ;
- напряжение короткого замыкания uK % = 5,5 %;
- мощность потерь холостого хода P0 = 2000 Вт;
- мощность потерь короткого замыкания PK = 7300 Вт;
- ток холостого хода I0% = 1,5 %.
- габариты: длина 2,25 м; ширина 1,1 м; высота 2,3 м; масса 3400 кг.
По (9) найдем номинальный ток первичной обмотки (ВН)
![]() А,
а по (8) можно рассчитать индуктивное
сопротивление от общего магнитного
потока
А,
а по (8) можно рассчитать индуктивное
сопротивление от общего магнитного
потока
 ,
Ом.
,
Ом.
По (10) можно найти остальные параметры:
 ,
Ом;
,
Ом;
 ,
Ом,
,
Ом,
![]() ,
Ом.
,
Ом.
Коэффициент трансформации трансформатора равен
![]() .
.
Полученные параметры расчетной схемы замещения трансформатора позволяют рассчитывать режим нагрузки трансформатора.
Например, пусть активная мощность нагрузки Рнагр составляет 430 кВт, а коэффициент мощности cosнагр равен 0,74. Номинальное напряжение нагрузки Uнагр равно 380 В. Определим напряжение на вторичной обмотке в режиме нагрузки трансформатора.
Для схемы рис. 7 можно записать с учетом закона Ома
![]() ,
,
![]() .
.
Откуда после несложных преобразований получим
 .
.
Здесь
![]() ,
,
![]() ,
отсюда
,
отсюда
![]() А.
А.
![]()
= 0,184 +j0,167 Ом.
Приведенное сопротивление нагрузки равно
![]() Ом.
Ом.
С учетом этих значений, имеем приведенное напряжение вторичной обмотки
![]() ,
В.
,
В.
Неприведенное
напряжение равно
![]() ,
В. Модуль напряжения приближенно равен
372 В,
то есть меньше номинального на
,
В. Модуль напряжения приближенно равен
372 В,
то есть меньше номинального на
![]() ,
,
что не выходит за пределы допустимого отклонения напряжения (по российским стандартам для электроприемников)
–5% < U% < +10%.
Внешняя характеристика трансформатора
Для построения внешней характеристики трансформатора определяют изменение напряжения, под которым понимается арифметическая разность между вторичными напряжениями трансформатора при холостом ходе и при номинальном токе нагрузки.
Изменение напряжения представляет собой важную эксплуатационную характеристику трансформатора. Проще всего его определить с помощью векторной диаграммы для схемы рис.7, когда пренебрегают током намагничивания I1+I '2 0. В результате получается схема, приведенная на рис. 10.
О собенностью
схемы являются не произвольные, а
номинальные значения токов. Для
удобства последующего анализа комплексный
ток I'2ном
принят с противоположным знаком.
собенностью
схемы являются не произвольные, а
номинальные значения токов. Для
удобства последующего анализа комплексный
ток I'2ном
принят с противоположным знаком.
Соответствующая векторная диаграмма приведена на рис.11,а.
Здесь напряжение короткого замыкания представлено двумя составляющими:
![]() ,
,
![]() .
.
Хотя изменение напряжение равно
![]()
или
![]() ,
,
на векторной диаграмме изменением напряжения считают не отрезок CD', а отрезок CD. Погрешность при этом невелика. Из рис. 11,а следует
![]() .
.
а) б)
Рис. 11. Упрощенная векторная диаграмма (а) и внешняя характеристика трансформатора (б)
Таким образом, изменение напряжения в трансформаторе равно
![]()
или
![]() .
(11)
.
(11)
Если
необходимо определить изменение
напряжения при токе I2
I2ном,
то достаточно умножить правую часть
(11) на коэффициент нагрузки трансформатора
![]() .
.
На рис. 11,б приведена внешняя характеристика трансформатора, где показано изменение напряжения. Характеристика считается прямой линией и проводится через две точки с координатами: [0; U1ном] и [I'2ном; (U1ном – U'2)].
Теоретические положения к задаче 3.2
Э лектромагнитная
схема наиболее распространенного
трехфазного асинхронного двигателя
представлена на рис.11.
Она отличается от схемы трансформатора
тем, что ее магнитная система выполнена
(из листовой электротехнической стали)
в виде двух концентрических цилиндров,
из которых внутренний (ротор), укрепляемый
на валу в подшипниках, может свободно
вращаться внутри неподвижного
внешнего (статора). Обмотка 1
размещается
равномерно по окружности статора
так, чтобы отдельные ее фазы были сдвинуты
по отношению друг к другу на 120°. Обмотка
2
на
роторе выполняется трехфазной или
многофазной и в простейшем случае
замыкается накоротко. Для лучшей
магнитной связи воздушный зазор 3
между
статором и ротором выбирается минимально
возможным. Если обмотку статора
присоединить к источнику трехфазного
тока, то ток, протекая по обмотке,
создаст магнитное поле, ось которого
непрерывно перемещается (вращается)
в пространстве (рис.2,а)2.
Это вращающееся поле будет наводить
токи в замкнутой обмотке ротора,
которые, взаимодействуя с полем,
создадут электромагнитные силы,
стремящиеся двигать ротор в направлении
вращения поля. Последнее легко уяснить
себе из простейшей модели (рис.2,б).
лектромагнитная
схема наиболее распространенного
трехфазного асинхронного двигателя
представлена на рис.11.
Она отличается от схемы трансформатора
тем, что ее магнитная система выполнена
(из листовой электротехнической стали)
в виде двух концентрических цилиндров,
из которых внутренний (ротор), укрепляемый
на валу в подшипниках, может свободно
вращаться внутри неподвижного
внешнего (статора). Обмотка 1
размещается
равномерно по окружности статора
так, чтобы отдельные ее фазы были сдвинуты
по отношению друг к другу на 120°. Обмотка
2
на
роторе выполняется трехфазной или
многофазной и в простейшем случае
замыкается накоротко. Для лучшей
магнитной связи воздушный зазор 3
между
статором и ротором выбирается минимально
возможным. Если обмотку статора
присоединить к источнику трехфазного
тока, то ток, протекая по обмотке,
создаст магнитное поле, ось которого
непрерывно перемещается (вращается)
в пространстве (рис.2,а)2.
Это вращающееся поле будет наводить
токи в замкнутой обмотке ротора,
которые, взаимодействуя с полем,
создадут электромагнитные силы,
стремящиеся двигать ротор в направлении
вращения поля. Последнее легко уяснить
себе из простейшей модели (рис.2,б).
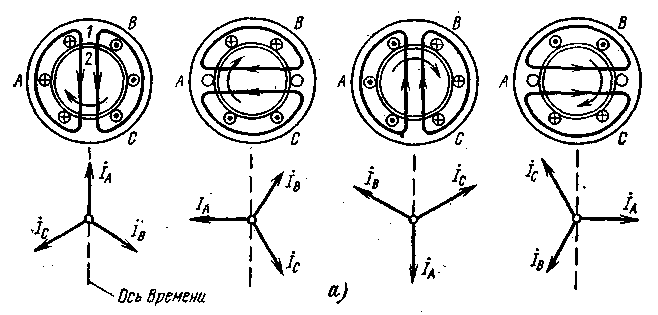
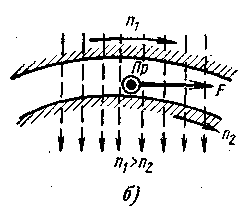
Рис. 2. Объяснение принципа работы трехфазного асинхронного двигателя: а – образование вращающегося магнитного поля; б – взаимодействие тока ротора с магнитным полем при работе машины двигателем
При движении магнитного поля, например слева направо, в проводнике Пр ротора возникает ЭДС, направленная из-за плоскости чертежа (правило «правой руки»). Если ток в проводнике будет при этом совпадать по фазе с ЭДС, то действующая на проводник электромагнитная сила F будет стремиться двигать его в направлении вращения поля (правило «левой руки»).
Ротор двигателя, основанного на этом принципе, будет вращаться всегда медленнее поля (асинхронно по отношению к последнему), так как только при этих условиях в обмотке ротора наводятся ЭДС и протекают токи. Это отставание ротора от поля называют скольжением. Чем больше скольжение, тем большие токи возникают в обмотке ротора (при заданном неизменном магнитном поле) и тем большее механическое сопротивление способен преодолевать ротор, вращая рабочий механизм РМ (рис. 1). Таким образом, частота вращения асинхронного двигателя меняется с нагрузкой, постепенно уменьшаясь с ростом последней.
Если вращающееся
магнитное поле, создаваемое переменным
током, образует на окружности статора
один северный (С)
и один южный
(Ю)
полюсы (т.
е. одну пару полюсов), то в этом простейшем
случае одному периоду переменного тока
соответствуют поворот оси поля на
360° и возвращение ее в исходное положение
(рис. 2,а).
Если обозначить
число оборотов поля в минуту через п1,
то число его оборотов в секунду будет
п1
/
60 и, следовательно,
![]() или
или
![]() ,
где f1
– частота тока статора, создающего
поле.
,
где f1
– частота тока статора, создающего
поле.
Если обмотку статора выполнить так, что число пар полюсов магнитного поля вдоль окружности воздушного зазора будет р, то частота вращения магнитного поля, так называемая «синхронная частота вращения», при той же частоте будет в р раз меньше, так как ось магнитного поля повернется на 360° теперь за р периодов; поэтому в общем случае
![]() (1)
(1)
или
![]() (2)
(2)
Скольжение ротора асинхронного двигателя s в долях синхронной частоты вращения п1 равно:
![]() (3)
(3)
Частота ЭДС и токов ротора может быть найдена из равенства, аналогичного (2), если вместо п1 подставить частоту вращения поля относительно ротора, т. е. п1 – п2 = sn1, тогда
![]() . (4)
. (4)
Из (3) с учетом (4)
![]() (5)
(5)
Обычно при работе асинхронной машины s << 1, поэтому, как следует из равенства (5), ее ротор вращается с частотой, близкой к синхронной, лишь незначительно снижая частоту вращения с нагрузкой.
Из-за своей простоты и надежности трехфазный асинхронный двигатель нашел широкое распространение в установках переменного тока.
Как всякая электрическая машина, асинхронная машина обратима, т. е. она может работать как в режиме двигателя, так и в режиме генератора, преобразуя механическую энергию переменного тока. В режиме генератора ротор машины надо вращать приводным двигателем ПД быстрее поля (n2 > n1). При этом изменяются направления наведенных в обмотке ротора ЭДС и тока, а следовательно, и направление тока в статоре3. При этих условиях машина уже не потребляет, а отдает в сеть активную мощность соответственно механической мощности, затрачиваемой приводным двигателем на вращение ротора (электромагнитная сила F в режиме генератора меняет свое направление и противодействует вращению ротора).
Как было показано выше, основной особенностью асинхронной машины является чисто магнитная трансформаторная связь между обмотками первичной и вторичной систем. Изменение тока в первичной системе связано с изменением тока во вторичной системе. Поэтому дальнейшим развитием электромагнитной схемы электрической машины является раздельное питание обмоток статора и ротора.
Номинальную мощность на зажимах двигателя определяют по формуле:
P1ном = Р2ном /, кВт,
здесь КПД следует подставлять в относительных единицах.
Номинальные фазные напряжения при соединении обмоток статора звездой и треугольником определяют исходя из соотношения между линейными и фазными напряжениями при звезде и треугольнике (линейные напряжения заданы).
Номинальные линейные токи определяют из формулы мощности на зажимах двигателя:
![]() .
.
Фазные токи определяют исходя из соотношений между фазными и линейными токами при звезде и треугольнике.
Пусковой ток двигателя определяют, используя кратность пускового тока (см. табл. 3.2) и значения номинальных токов при соединении в звезду и треугольник.
Номинальный вращающий момент двигателя Мном (в Нм) определяют по формуле:
![]()
Здесь Р2ном в кВт, n2ном в об/мин.
Зная номинальный момент Мном и кратность пускового момента Кпуск (см. табл. 3.2) можно определить пусковой момент Мпуск.
Максимальный вращающий момент Мmax определяют аналогично, используя Мном и Кmax.
Характеристику М = f(s) рассчитывают по упрощенной формуле Клосса:
 ,
,
где sкр - критическое скольжение, при котором двигатель развивает максимальный вращающий момент:
![]()
Механическая характеристика М = f(s) показана на рис. 3.
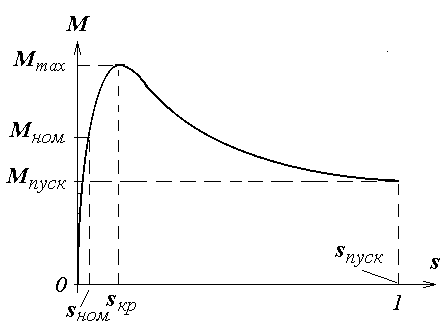
Рис. 3