

105 Назовите основные виды измерительных преобразователей (датчиков) перемещения
Измерительное устройство (первичный измерительный преобразователь) – датчик – измеряет параметр технологического процесса и преобразует величину из одной физической формы в другую.
Преобразователи делятся на 2 группы по принципу действия:
параметрический датчик (изменяет какой-либо свой параметр под действием измеряемой величины (резистивные,индуктивные, емкостные, трансформаторные и др.));
генераторный датчик (сам создает выходной сигнал и не требует внешнего источника энергии (фотоэлектрический, термоэлектрический, индукционный, пьезоэлектрический)).
Датчики характеризуются следующими величинами:
статическая характеристика(линейная//нелинейная);
чувствительность – показывает, насколько изменится выходная величина при изменениивходной на 1 единицу;
разрешающая способность – наименьшее изменение входного сигнала, которое может быть измерено преобразователем;
точность – задается в % от полной шкалы измерительного прибора.
Классификация.
По измеряемому параметру: Д силы, Д давления, Д расхода, Д температуры, Д перемещения, Д положения и др.
По принципу действия: оптические (фотоэлектрич.), емкостные, индуктивные, индукционные, патенциометрические и др.
По технологии изготовления: элементные, интегральные.
По характеру выходного сигнала: аналоговые, цифровые, импульсные и др.
В следящих системах станков с ЧПУ применяются прецизионные преобразователи перемещений, которые могут измерять положение с разрешающей способностью 1 мкм и менее, определять направление движения, его скорость, а в некоторых случаях и ускорение.
Измерительный преобразователь перемещения (ИПП) состоит из датчика положения (ДП) и измерительной системы (ИС), преобразующей сигнал датчика в цифровой или аналоговый сигнал. По конструктивному исполнению ДП делятся на круговые и линейные. В оборудовании с ЧПУ используются все основные виды круговых и линейных индукционных ДП: вращающиеся трансформаторы, индукционные редуктосины, круговые и линейные индуктосины.
Вращающиеся трансформаторы (ВТ) - индукционные ДП (датчики перемещений) - выполнены в виде электрических микромашин. Принцип действия основан на использовании закона электро-магнитной индукции – возникновении ЭДС в обмотке при изменении параметров магнитного поля.
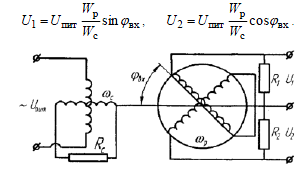
ВТ имеют по 2 взаимно перпендикулярные обмотки на статоре и роторе и могут включаться по различным измерительным схемам. Одной из них является схема синусно-косинусного ВТ, изображенная на рисунке. Напряжение питания подается на одну из статорных обмоток, на вторую статорную обмотку подключено статорное сопротивление, а с роторных обмоток снимаются напряжения. Статор создает пульсирующее магнитное поле, в результате в роторных обмотках наводится ЭДС и на выходе возникает переменное напряжение, т.е. выходные напряжения зависят от sin и cos угла поворота ротора.
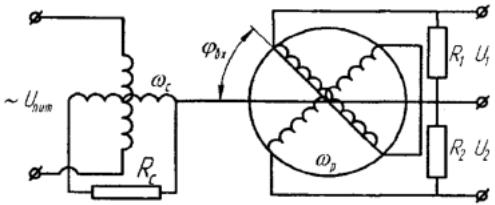 Схема синусно-косинусного ВТ
Схема синусно-косинусного ВТ
В станках с ЧПУ вращающиеся трансформаторы используются в качестве датчиков обратной связи и часто включаются по схеме фазовращателя: когда фаза выходного напряжения равна углу поворота ротора.
Линейный индуктосин состоит из неподвижной линейки, собранной из нескольких секций, и подвижной линейки – съемника сигналов. Линейка и съемник выполнены из изоляционного материала, на который печатным способом нанесены обмотки с шагом S. Ввиду отсутствия магнитопровода и малых размеров съемника индуктосин обеспечивает значительную электрическую редукцию. Однако коэффициент электромагнитной связи в индуктосине весьма низок, из-за чего происходит ослабление выходного сигнала.
Чтобы применять индуктосин, надо на исполнительный механизм (ИМ) установить не только линейки и головки, но и предварительный усилитель выходного сигнала. Даже при тщательном выравнивании зазора между линейкой и головкой этот зазор при перемещении головки вдоль линейки не остается постоянным, из-за чего изменяется коэффициент индуктивной связи и появляется дополнительная погрешность. На линейке индуктосина выполняется одна обмот- ка, при стыковке линеек их обмотки соединяются последовательно. Поскольку линейные индуктосины соединяются непосредственно с ИМ, то шаг обмотки s принимается равным стандартизованному перемещению 2 мм. На головке индуктосина нанесены две обмотки с пространственным сдвигом на 1/4 шага, что обеспечивает возможность работы индуктосина в фазовом и амплитудном режимах, которые используются во всех индукционных ДП.
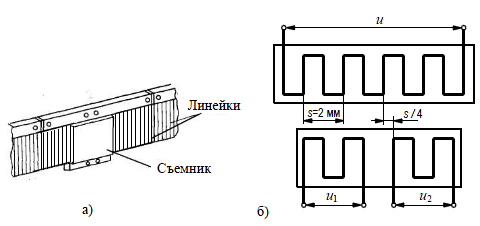
Рис. Линейный индуктосин: а – конструктивное исполнение; б – взаиморасположение обмоток
Рассмотрим работу индукционного ДП (ВТ или индуктосина) в фазовом режиме.
В этом режиме на пространственно
сдвинутые обмотки датчика подаются
напряжения:
![]()
где ит , ω0 – амплитуда и круговая частота питающего напряжения.
С выхода ДП снимается напряжение
![]()
где φ – угловое положение подвижного
элемента ДП относительно начала шага
или оборота, выраженное в электрических
градусах. Например, если используется
линейный индукционный ДП, то φ = 2nx/ s ,
где х – перемещение головки
относительно начала шага; s – шаг ДП.
Подставляя формулу, после несложных
преобразований получаем
![]()
Таким образом, фаза напряжения и пропорциональна измеряемому перемещению, благодаря чему такой режим индукционного ДП получил название фазового.