

99. Принципы построения САУ: разомкнутые и замкнутые системы, управление по возмущению, управление по отклонению, комбинированное управление. Классификация САУ.
В зависимости от схемы передачи сигналов различают следующие принципы построения САУ:
Е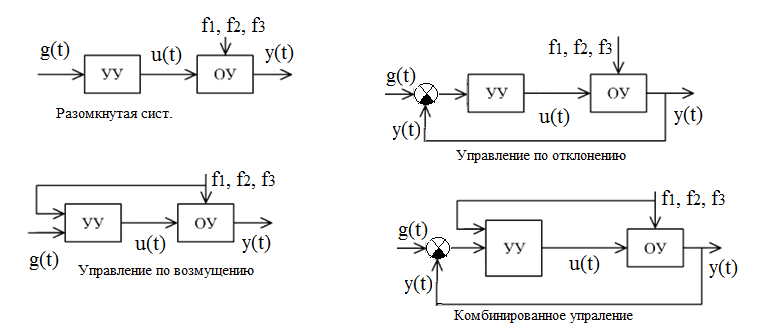 сли
информация по выходной величине не
используется, то система разомкнутая:
выходная величина y(t)
зависит от управляющего воздействия
u(t),
поступающего с Устройства Управления
(УУ).
сли
информация по выходной величине не
используется, то система разомкнутая:
выходная величина y(t)
зависит от управляющего воздействия
u(t),
поступающего с Устройства Управления
(УУ).
На вход УУ поступает задающее воздействие g(t). Величины fi , приводящие к отклонению величины y(t) от заданного значения называются возмущающими воздействиями.
Задача САУ – обеспечение постоянства или изменение по заданному закону выходной величины. Для выполнения задачи используются принципы:
У правление по возмущению (Принцип компенсации возмущения).
Принцип: измеряется возмущение и с помощью УУ на объект создается воздействие, компенсирующее вредное влияние возмущения. f1 (контролируемое) называют главным возмущением.
Достоинства («+»): высокое быстродействие, т.к. управляющее воздействие u(t) создается одновременно с возникновением возмущения.
Недостатки («-»): 1) Устраняется влияние только измеряемого возмущения. 2) Точная компенсация требует настройки регулятора и с течением времени нарушается, т.к. изменяются параметры системы.
Поэтому регулирование по возмущению самостоятельно применяется редко.
Управление по отклонению (по ошибке).
И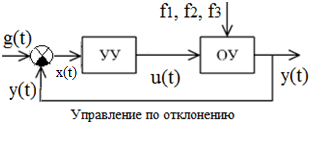 дея
состоит в том, чтобы найти разность
x(t)=g(t)-y(t)
между задающим воздействием и выходной
величиной, и по x(t)
создать управляющее воздействие u(t)
на Объект Управления (ОУ). Величина x(t)
– ошибка регулирования.
дея
состоит в том, чтобы найти разность
x(t)=g(t)-y(t)
между задающим воздействием и выходной
величиной, и по x(t)
создать управляющее воздействие u(t)
на Объект Управления (ОУ). Величина x(t)
– ошибка регулирования.
∆ y=- x(t)= y(t)-g(t) – отклонение регулируемой величины от заданного значения. УУ вырабатывает воздействие, чтобы уменьшить величину ошибки.
«+»: 1) Устраняет влияние любого возмущения, действующего на объект. 2) Нет жестких требований к стабильности параметра УУ, т.к. изменение параметра приводит к ошибке x(t), которая затем устраняется УУ.
«-»: 1) Управляющее воздействие u(t) вырабатывается после появления ошибки, т.е. в первый момент ошибка может быть значительна. 2) Наличие замкнутого контура может приводить к неустойчивой работе (колебаниям).
Система по возмущению – разомкнутая система.
Система по отклонению – замкнутая.
Комбинированное управление.
О дновременно используется управление по возмущению и по ошибке.
В первый момент при возмущении f1 вырабатывается управляющее воздействие по принципу компенсации и если ошибка ≠0, то дополнительно вырабатывается воздействие по ошибке. Достоинства 1-го и 2-го принципа объединяются.
Системы 2-го и 3-го замкнутого типа называются системы с обратной связью (ОС).
ОС – подача сигнала с выхода на ее вход. Если сигнал обратной связи вычитается (-y(t)), то это отрицательная ОС. Иначе – положительная (ПОС).
При регулировании по ошибке используется ООС.
Классификация сау.
По наличию обратной связи: разомкнутые // замкнутые.
По числу управляемых величин: одномерные // многомерные.
По степени использования вычислительной техники: системы без вычислительных устройств // с использованием микропроцессоров // системы с программируемым компьютерным управлением.
По назначению: системы автоматического регулирования (САР) // системы с произвольным законом управления (оптимальные // самонастраивающиеся // адаптивные).
САР: системы стабилизации (задающее воздействие g(t)=const) // системы программного регулирования (g(t)=var – известный закон) // следящие системы (g(t)=var – неизвестная функция).
По способу математического описания и характеру протекания процессов:
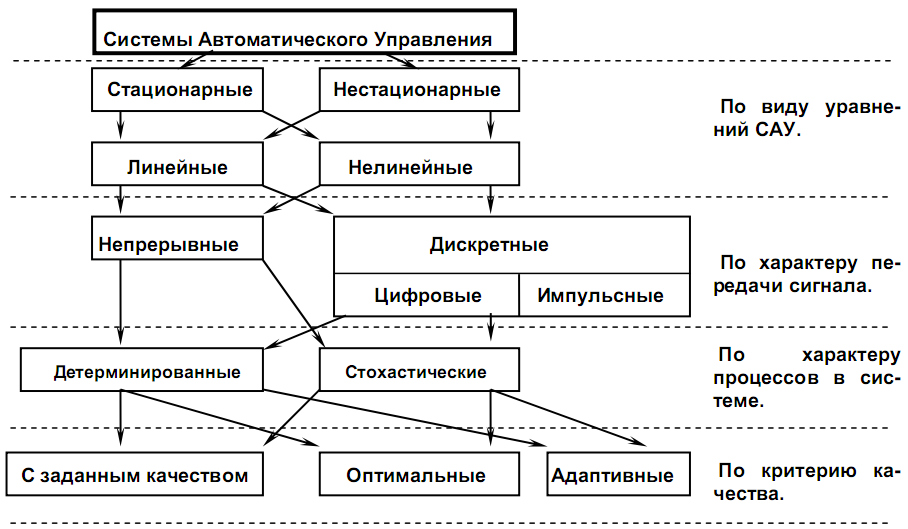
По виду уравнений САУ: стационарные///нестационарные; линейные///нелинейные.
По характеру передачи сигнала: непрерывные///дискретные (цифровые//импульсные).
По характеру процессов в системе: детерминированные///стохастические.
По критерию качества: оптимальные/// адаптивные///с заданным качеством.
100 Уравнения линейных систем в изображениях по Лапласу. Передаточная функция по Лапласу. Связь передаточной функции по Лапласу с операторной передаточной функцией.
В ТАУ для описания свойств линейных звеньев широко используются передаточные функции. Существуют два вида передаточных функций:
– операторная передаточная функция W(p);
– передаточная функция по Лапласу.
Суть преобразований Лапласа состоит в
переходе от функции времени
 к функции комплексной переменной
к функции комплексной переменной
 ,
где s=c+jω.
,
где s=c+jω.
Преобразование Лапласа осуществляется по следующим формулам:
прямое преобразование:
обратное преобразование: ,
при
,
при
 ,
,
Рассмотрим основные свойства преобразования Лапласа
1. Линейность:
 ,
,
 ;
;
 .
.
2. Изображение производной:
 ;
;

Для производной любого порядка
 .Если
все начальные условия нулевые, т.е.
.Если
все начальные условия нулевые, т.е.
 ,
то
,
то .
.
3. Изображение интеграла:
 .
.
4. Свойства для пределов оригинала и изображения:
 ,
(теорема о начальном значении оригинала);
,
(теорема о начальном значении оригинала);
 ,
(теорема о конечном значении оригинала).
,
(теорема о конечном значении оригинала).
Используется для нахождения начального и конечного положения, если знаем изображение.
5. Изображения типовых функций времени:
а) единичная ступенчатая функция

 ;
;
б) единичная импульсная функция (функция Дирака)

 ;
;
 .
.
 .
.
в) функция запаздывания
 ,
τ – время запаздывания; например, если
x(t)=A·sin(ωt),
то
,
τ – время запаздывания; например, если
x(t)=A·sin(ωt),
то
 ,
где φ=ωτ.
,
где φ=ωτ.
Имеем:
 .
.
Пусть теперь имеется динамическое звено, описываемое обыкновенным линейным дифференциальным уравнением
 ,
,
или в операторной форме при p=d/dt
 ,
(1) где
,
(1) где
 ,
,


Согласно уравнению (1) операторная передаточная функция звена
 .
.
Применяя к этому
дифференциальному уравнению преобразование
Лапласа, получим: ,
или при нулевых начальных условиях
,
или при нулевых начальных условиях

 ,
,
где
 ,
,
 .
.
Отношение
 называется передаточной функцией
динамического звена по Лапласу.
называется передаточной функцией
динамического звена по Лапласу.