

Режим корекції гіроагрегатів
Для забезпечення виставки і корекції гіроагрегатів, узгодження з показами по заданому значенні курса, передбачена система її к5орекції, здійснена розворотом статора курсового сельсина-датчика гіроскопа по корегуючим сигналам (азимутальної корекції гіроагрегата).
Виконуючим механізмом служить також інтегруючий двигун ІЕ-1М з редуктором, який здійснює режим широтної корекції гіроагрегата в режимі ГПК. Однак в цьому випадку ІЕ-1М використовується не в режимі інтегрування, а як виконавчий двофазний двигун змінного струму. Тахогенератор при цьому використовує для обмеження швидкості обертання інтегратора за допомогою так званого режиму «відсічки», наступаючого при підвищенні скорості обертання більш 10000 об/хв. (що відповідає сигналу напруги в 60 в, знятого з тахометра). При цьому вхід підсилювача при скорості більш 10000 об/хв. Подається сигнал негативного зв’язку з тахогенератора, зменшилось підсилення підсилювача і, відповідно, знижує швидкість обертання до номіналу (10000 об/хв). При швидкості обертання менш 10000 об/хв зворотнього зв’язку відключається і підсилювач дає максимальне підсилення.
Підсилювач УШК управляється двигуном генератором ІЕ-1М як в режимі гіронапівкомпасу, так і в режимі виставки і корекції курсу. Режим роботи УШК визначається тим , що включено і знеструмлене реле азимутальної корекції, а також видом сигналу, який поступає на вхід підсилювача.
В режимі корекції підсилювач має два входи: для корекції по «точному» (22 штирьок роз’єму гіроагрегату) і «грубий» (21 штирьок роз’єму гіроагрегату) каналам.
Коефіцієнт підсилення по «точному» каналу знаходяться в межах 1000-2000 (по напрузі). Коефіцієнт підсилення по «грубому» каналу того ж порядку, оскільки використовуються загальний канал підсилення по «грубому» і «точному» входу, але вхід «грубого» каналу має обмеження по вхідній напрузі і підсилення сигналу «грубого» каналу починається лише після того, як вхідний сигнал по цьому каналу перевищить поріг 3–4В. Ця обставина наложила свої особливості на електричну схему системи, на що буде вказано розбір роботи азимутальної корекції в різних режимах.
Система азимутальної корекції має наступні режими роботи:
– магнітної корекції МК;
– астрокорекції АК (по «грубо-точному»і «грубому» каналу);
ручної корекції (режим «курсозадатчика»).
Режим магнітної корекції
Для корекції показів гіроагрегатів по магнітному курсу (курсу, обрахованого по магнітному меридіану) використовуючи системи магнітної корекції, датчиком який служить чутливим до магнітного поля Землі елемент.
В системі ТКС в якості елементу, який вимірює магнітний курс, використовують індукційний датчик ІД.
Розглянемо питання визначення магнітного курсу. Відомо, що магнітний полюс земної кулі розташовані поблизу географічних полюсів Землі. Магнітне поле яке утворюється земною кулею, взаємодії з феромагнітними масами магнітної стрілки, які утворюють сили, на неї діючі. Вільно підвішена магнітна стрілка під дією цих сил встановлюється по направленню силових ліній.
Вектор напруженості магнітного поля Землі (рис.) можна розкласти на горизонтальну(Н) і вертикальну (Z) складові.
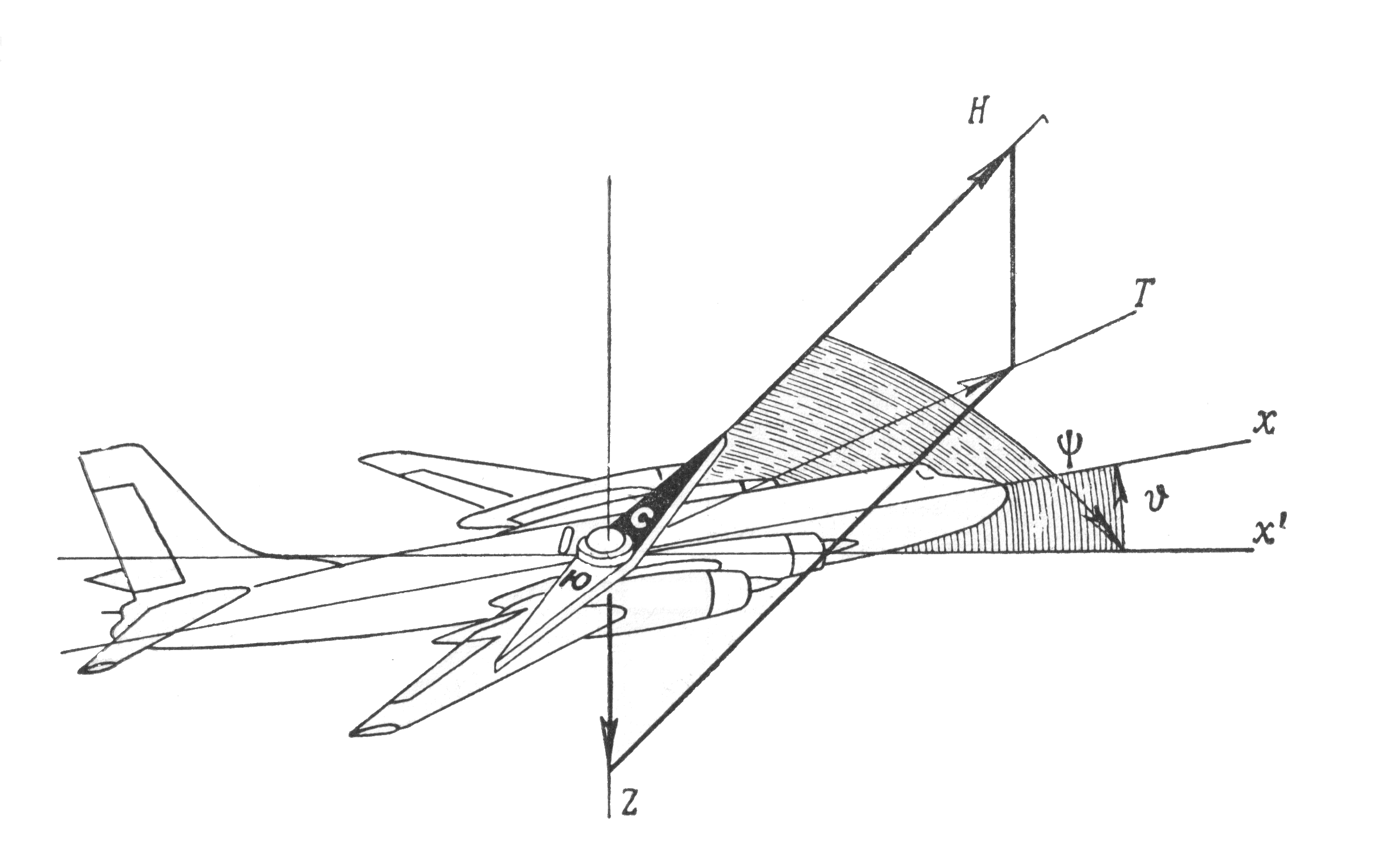
Рис.16. Магнітний курс літака:
Т – напруженість магнітного поля Землі (повна величина); Н – горизонтальна складова напруженості магнітного поля Землі; Z – вертикальна складова напруженості магнітного поля Землі; ψ – магнітний курс МК літака;ΰ – кут тангажа літака; Ох - продольна вісь літака; Ох´ - проекція прокольної вісі на горизонтальну площину; С – Ю – магнітна стрілка компасу.
Направлення вектора горизонтальної складової Н магнітного поля в даній точці визначають направлення магнітного меридіану місця.
Для визначення направлення руху літака по земній поверхні з використанням розглянутих властивостей магнітного поля Землі вимірюється кутом по годинниковій стрілці між направленням магнітного меридіану і проекцією Оx´ прокольної вісі літака Оx на площину горизонту. Даний кут називається магнітним курсом літака.
Для вимірювання кута літака в якості чутливого елементу магнітних компасів можна використовувати магнітну стрілку. Однак моменти тертя, які виникають в опорах магнітної стрілки, наявність в конструкції струмопроводів для дистанційного зняття показів, визивають значне затирання стрілки і, отже, знижують чутливість і точність роботи компасу. В наслідок цього в високих полярних широтах, де горизонтальна складова напруженості магнітного поля Землі становить менш 0,1 э, магнітна стрілка практично перестає давати стабільні покази магнітного курсу.
Для збільшення чутливості магнітного датчика в курсовій системі, оснований на індукційному принципі.
Чутливий елемент датчика служить так званий індукційний трикутник (рис.17), складається з трьох магнітних зонтів (рис.18), розташованих під кутом 60° і закріплених на загальній платформі, яка знаходиться в площині горизонту. Призначення такого чутливого елементу для вимірювання магнітного курсу дозволяє отримати високу точність і стабільність показів при величині горизонтальної складової магнітного поля Землі від Н=0,06 э і вище.
Магнітний зонд складається з двох сердечників 1, виготовлених з молебденного пермалою 80НXС і розташованих паралельно один до одного. На сердечнику 1 навиті дві обмотки: намагнічуюча 2 і сигнальна 3.
Намагнічуюча обмотка 2 навита на кожний стержень окремо і з’єднана послідовно, утворюючи зустрічну обмотку, а сигнальна обмотка 3 охвачує обидва стержня зразу.
Рис.17. Схема з’эднання індукційного трикутника з сельсином-трансформатором (перший канал системи):
1 – індукційний трикутник (чутливий елемент датчика ІД);
2 – статор сельсин-трансформатора корегую чого механізму;
3 - ротор сельсин-трансформатора корегую чого механізму;
4 – підсилювач; 5 – опрацьований двигун ДИД-0,5Т, 6 – редуктор; 7 – зонд; 8 – намагнічуюча обмотка; 9 – сигнальна обмотка; Н – горизонтальна складова напруженості магнітного поля Землі; uf – напруга живлення намагніченої обмотки; ψ – магнітний курс МК літака; Фст – магнітний потік статора.
Підмагнічувана
напруга обмотки
![]() по величині вибирається таким чином,
щоб магнітні потоки, які утворюються в
стержневих магнітопроводах і направлені
зустрічно, при відсутності зовнішнього
магнітного поля не насищали б магнітопровід
і були чисто синусоїдними. Такі потоки
утворюють в сигнальній обмотці синусною
напругою, але будучи направлені, так як
і потоки, назустріч і рівні між собою,
вони компенсуються, і сигнальна напруга
дорівнює нулю (рис.19,б).
по величині вибирається таким чином,
щоб магнітні потоки, які утворюються в
стержневих магнітопроводах і направлені
зустрічно, при відсутності зовнішнього
магнітного поля не насищали б магнітопровід
і були чисто синусоїдними. Такі потоки
утворюють в сигнальній обмотці синусною
напругою, але будучи направлені, так як
і потоки, назустріч і рівні між собою,
вони компенсуються, і сигнальна напруга
дорівнює нулю (рис.19,б).
рис.18. Схема магнітного зонду:
1 – сердечник; 2 – намагнічуюча обмотка; 3 – сигнальна обмотка; Н – горизонтальна складова напряжонності магнітного поля Землі; ψ – кут, який визначає направлення Н відносно направлення зонду; uf – напруга живлення намагніченої обмотки; е2f – напруга (ЕДС), яка виникає в сигнальній обмотці зонду; ФЗ – магнітний потік, який викликаний в сердечнику дією Н; Фuf - магнітний потік, який викликаний в сердечнику намагнічуючою обмоткою.
Якщо вказаний чутливий елемент розмістити в постійному магнітному полі, строго перпендикулярно до змінного поля магнітопроводів, тоді обидва цих поля по відношенню один до одного дорівнюють і синусоїдальні і з сигнальної обмотки не поступає сигнал.
Якщо елемент розмістити в магнітне поле під деяким кутом (не дорівнює 90°), то з’являється складова поля, яка співпадає по направленню робочого поля магнітопотоку (рис.19,б). при цьому синусоїдальність сумарного потоку порушується і сума вторинних напруг вже не дорівнює нулю; з’являється сигнал, амплітуда і фаза якого залежать від направлення стержня до горизонтальної складової магнітного поля.
Напруга, яка знімається з сигнальної обмотки зонду, що представляє похідну з зворотнім знаком від цього потоку, має амплітуду також виражений несинусоїдальною формою. Частота сигналу, подвійна по відношенню до частоти підмагніченої напруги.
Очевидно,
що чутливість такого елементу визначається
відношенням
![]() і
чим більша ця величина, тим менша
чутливість такого елементу до відмічення
його, від перпендикулярності до
зовнішнього поля. Тому матеріалом
магнітопроводу служить сплав з пермалою
(матеріал з високим відношенням
,
тобто насищаються при досить малих
значеннях магнітної напруженості).
і
чим більша ця величина, тим менша
чутливість такого елементу до відмічення
його, від перпендикулярності до
зовнішнього поля. Тому матеріалом
магнітопроводу служить сплав з пермалою
(матеріал з високим відношенням
,
тобто насищаються при досить малих
значеннях магнітної напруженості).

а) б)
Рис.19. Графіки, що пояснюють роботу магнітного зонду:
а - при відсутності зовнішнього
магнітного поля; б – при наявності
зовнішнього магнітного поля, не
перпендикулярного зонду; Фз-
повний вектор магнітного потоку поля
Землі; Фuf
– вектор магнітного
потоку від дії напруги живлення uf;
Фр
– вектор робочого потоку; f
– частота напруги живлення; ω1
ω2
– сигнальны обмотки зонду; ω3
ω4 –
намагнічуюча обмотка зонду; ес
– напруга (ЕДС), знята з сигнальноъ
обмотки; Внас
– максимальна ындукцыя стержня зонду;
В1
і В2
– магнітна ындукцыя в сердечниках
зонду; В – результуюче значення магнітної
індукції зонду; е1
і е2
– ЕДС, яка виникає в сигнальній обмотці;
![]() - величини намагнічуючих сил від дії
струмів і1
і2
в сердечниках; Ннас
– лінійний участок зміни магнітної
індукції при зміні намагнічуючої сили.
- величини намагнічуючих сил від дії
струмів і1
і2
в сердечниках; Ннас
– лінійний участок зміни магнітної
індукції при зміні намагнічуючої сили.
Таким чином, похибка в у визначенні направлення горизонтальної складової магнітного поля Землі визначається в основній величині не ідентичності обох стержнів, а чутливість – якістю магнітопроводу. Крім того, нелінійний характер явищ, які проходять в зонді, визначає неможливість не опосередковано використовувати його сигналу для вимірювання магнітного курсу. Існує два способи включення зонду для визначення направлення магнітного поля Землі.
Перший спосіб є таким, що зонд по сигналу відхилення від перпендикуляру до направлення магнітних силових ліній через спеціальний сервопровод опрацьовується в положенні, при якому зонд буде перпендикулярний полю Землі. При цьому стрілка, зв’язана з цим зондом, вкажемо направлення магнітної силової лінії.
Існує другий спосіб, який використовується в системі магнітної корекції курсових систем.
Сигнальні обмотки 9 (див. рис. 17) трьох зондів індукційного трикутника з’єднується «зірочкою» і трьома проводами електрично зв’язаними зі статора обмотка 2 система трансформатора, розташованого в корегуючому механізмі КМ-5. струми, які виникають в обмотці статора 2 сельсину, збурюють в ньому результуючий магнітний потік Ф, який, в свою чергу, індикується в обмотці ротора 3 сельсина електрорушійну силу.
Чим більше розузгодження системи «індукційний трикутник – сельсин-трансформатор», тим більш індикується напруга в обмотці ротору.
Напруга, яка знімається з обмотки ротору, подається на вхід підсилювача першого каналу, і далі на управляючу обмотку серводвигуна 5, який за допомогою редуктора 6, опрацьовується ротор 3 сельсина в положення, яке відповідає нульовій ЕДС.
Таким чином, повороту індукційного чутливого елементу 1 датчика ІД-3 на який-небудь кут відносно магнітного меридіану Землі Н буде відповідати повороту на такий же кут ротора 3 сельсин-трансформатора корегуючого механізму.
Корегуючий механізм КМ-5 призначений для:
зв’язок магнітноіндукційного датчика ІД-3 з гіроагрегатом ГА-3 чи покажчиком курсу КУШ-1;
усунення четвертної девіації і інструментальних похибок за допомагою спеціального лекала, встроеного в корегую чому механізму;
введення за допомогою крамал’єри магнітного віднінення;
приведення в польот магнітного курсу до ортодромії за допомогою тоїж крамол’єри (при введенні МПУ0).
В корегую чому механізмі встановлені два сельсина, один із яких, як було сказано вище, служить для узгодження ротора цього сельсина з магнітоіндукційним датчиком ІД-3, а другий сельсин-приймач для передачі сигналів курсу, під кореговано корегуючим механізмом за допомогою лекала і кремал’єри, на гіроагрегат ГА-3 чи на покажчик КУШ-1. Вісь ротора першого сельсина зв’язана з віссю ротора другого сельсина за допомогою лекального пристрою, який забезпечує розворот ротора на кут, який визначений вигин стрічки лекального пристрою.
Статор сельсин-приймача М1 (див. рис. 11) корегуючого механізму КМ-5, якщо перемикач В2 пульта управління встановлено в положення ГПК, через нормальні замкнуті контакти реле Р13 блока РБ-2 з’єднаний до сельсин-датчика гіромагнітного курсу М2 покажчика КУШ-1. Сигнал неузгодження з сельсин-приймача М1 в механізмі КМ-5 подається через нормально-замкнуті контакти реле Р14 блока РБ-2 на вхід підсилювача УП-2 на покажчику КУШ-1, вихідний сигнал з якого поступає на управляючу обмотку двигуна М1 цього покажчика, опрацьований ротором сельсина-датчика М2 до узгодження положення з магнітним курсом. Швидкість узгодження може бути змінена електромагнітною муфтою ЕМ-1, яка управляється кнопкою Кн-1, розташованою також на покажчику КУШ-1.
Таким чином, датчик М1 покажчика КУШ-1 видає сигнал гіромагнітного курсу.
Примітка. Аналогічним чином формується для безперервної видачі споживачам сигналу гіромагнітного курсу на сельсин-датчику М4 (див. рис. 12) блоку БГМК-2, який входить в ТКС-П2 і призначений для безперервної видачі його споживачам. БГМК-2 відрізняється від КУШ-1 не є покажчиком і гіромагнітний курс, необхідний для роботи БГМК-2, поступає на прилад від основного гіроагрегату системи на сельсин-приймач М1 блоку.
Якщо перемикач В2 пульту ТУ-11 встановлений в положення «МК», то створюється слідкуюча система, подібна тільки, що описаній, але тільки з курсовим сельсин-датчиком М3 основного чи контрольного гіроагрегату в залежності від того в яке положення встановлений перемикач В4 пульту управління.
Схема системи магнітної корекції побудована так, що сигнали для корекції гіроагрегату проходять через ланцюг нормально-замкнутих контактів реле Р3, Р6, Р7 блоку РБ-2. При подачі напруги +27в на це реле підготовлюють ланцюг корекції основного гіроагрегату. Сигнал неузгодження з КМ-5 (сельсин М1) подається на вхід «точного» каналу підсилювача УШК гіроагрегату. При цьому вхід «грубого» каналу підсилювача УШК нормально-замкнутим контактом 1,2 реле Р8 блоку РБ-2 закорочується на корпус приладу.
Зміна швидкості узгодження сельсин-датчика гіроагрегату здійснюється виключенням електромагнітної муфти ЕМ-1, розташованої в редукторі азимутальної корекції ГА-3, при натисканні на кнопку Кн1 пульта управління.
Таким чином, при роботі системи в режимі МК в залежності від положення перемикача В4 пульту управління основного чи контрольного гіроагрегат видає значення гіромагнітного чи (при введенні в КМ-5 значення магнітного відмінювання) істинного курсу.
З опису ланцюгів корекції системи випливає, що в системі безперервно відпрацьовується гіромагнітний курс: чи в гіроагрегатах, чи в покажчику КУШ-1 (в схемі ТКС-П2 в блоці БГМК-2).
Вище вже відмічалося, що азимутальна корекція в гіроагрегат вводиться при скорості обертання двигуна ІМ-1М 9000-10 000 об/хв. Так як сигнал магнітного курсу з індукційного датчика в польоті носять нестабільний характер, двигун ІЕ-1М в цьому режимі безперервно працює на вказаних швидкостях, що визначають його інтенсивний знос в цьому режимі. Тому режим МК гіроагрегатів є короткочасні і включають на час, необхідний для корекції гіроагрегатів, тобто на 2-4 хвилин після відпускання кнопки узгодження в рівномірному прямолінійному польоті.
Тривалий гіромагнітний курс видається системою з покажчика КУШ-1 (чи блока БГМК-2 в системі ТКС-П2).
При розвороті літака ланцюг, яка управляє роботою системи в режимі МК (напруга +27 в з 10-го штирка Ш1 пульта управління), розривається вимикачем корекції і системи на час розвороту автоматично перехід в режим ГПК. На розвороті відключається також корекція по сигналам магнітного курсу сельсин-датчиків ГМК в КУШ-1 і БГМК-2.
Зауваження відносно індикації гіромагнітного курсу на КУШ-1. якщо перемикач покажчика стоїть в положенні «МК», то слідкуюча система стрілки «1» покажчика КУШ-1 (сельсин М4, підсилювач і двигун М3) отримує через нормально-замкнуті контакти реле Р8, Р9, Р10, Р11, розташованих в покажчику КУШ-1, живлення від ланцюга гіромагнітного курса і стрілки «1» показують гіромагнітний курс.
В момент включення гіроагрегату в режим МК (з яким в даний момент получають гіромагнітний курс покажчик КУШ-1) можуть бути два випадки:
– якщо
гіроскоп корегується по магнітному
курсу з врахування величини
![]() чи МПУо
(ІПУо),
то сельсин М2 покажчика КУШ-1 продовжують
видавати значення гіромагнітного курсу
з деякою помилкою, визначені помилкою,
визначені розходженням
чи МПУо
(ІПУо),
то сельсин М2 покажчика КУШ-1 продовжують
видавати значення гіромагнітного курсу
з деякою помилкою, визначені помилкою,
визначені розходженням
![]() і
і
![]() чи
чи
![]() ;
;
– якщо гіроскоп корегується по магнітному курсу (без поправки), то сельсин М2 покажчика видає невизначені покази. Тому в цьому випадку після виконання магнітної корекції системи і наступному перекладі системи знову в режим ГПК необхідно натискати кнопку покажчика по прискоренню узгодження по магнітному курсу.
Робота блоку БГМК-2. також позначилось, при роботі обох гіроагрегатів комплектації ТКС-П2 в режим ГПК (див. рис.12) сигнал гіромагнітного курсу видає сигнал гіромагнітного курсу БГМК-2.блок отримує сигнали магнітного курсу від індукційного датчика ІД-3 через корегуючий механізм КМ-5 і сигнали гіроскопічного курсу від одного із гіроагрегатів, робить опосередковане значення магнітного курсу по сигналам гіроскопічного курсу.
У випадку роботи одного з гіроагрегатів в режимі МК блоку БГМК-2 працює як повторювач значень курсу цього гіроагрегату.
При роботі системи в режим ГПК і в положення перемикача «Споживачі» пульта управління на відмітці «Осн.», обмотка статора сельсин-приймача М1 блоку БГМК-2 через контакти блока реле РБ-2 підключені до статорної обмотки сельсин-датчика основного гіроагрегату.
Якщо перемикач В5 встановлений в положення «Контр.» на обмотку реле Р5 блоку РБ-2 поступає сигнал «+27в» і обмотка статора сельсин М1 блоку БГМК-2 підключився до статорної обмотки сельсин-датчика контрольного гіроагрегату. Напруга, яка знімається з статорної обмотки сельсина М1 блоку БГМК-2, поступає на вхід підсилювача У1 і після підсилення – на управляючу обмотку двигун М2 блоку, який опрацьовується редуктор ротора сельсину М1 до положення, яке відповідає нульовій напрузі на роторні обмотці М1. з вісі ротора М1 зв’язані ротори сельсин-датчиків М3 і М4. статорна обмотка сельсина М4 через контакти реле блоку БГМК-2 і контакти реле Р13 блока РБ-2 підключена до обмотки статора сельсина М1 корегуючого механізму КМ-5. напруга з обмотки ротора цього сельсина через контакти реле Р14 блока РБ-2 поступає на вхід підсилювача У2 блоку БГМК-2 і після підсилення – на управляючу обмотку двигуна М5, який опрацьовує статор сельсина М3 до положення, яке відповідає нульовій напрузі на роторній обмотці сельсина М1 корегуючого механізму.
Для прискореного узгодження блоку БГМК-2 по магнітному курсу необхідно натиснути на пульті управління ПУ-11 кнопку Кн1 «Согласование»(узгодження). При цьому сигнал «+27в» від кнопки Кн1 поступає через контакти реле Р4 пульту управління в блок БГМК-2 на обмотку електромагнітної муфти ЕМ-1, яка включає велику швидкість узгодження.
На віражах на реле Р3 блоку БГМК-2 поступає сигнал «+27в» від вимикача корекції, який своїми контактами включає обмотку двигуна М5 від підсилювача У2.
При вмиканні режиму магнітної корекції основного гіроагрегату (на ПУ-11 перемикач В4 «Корекція» встановлений положення «Осн.», а перемикач В2 – в положення «МК») напруга +27 в подається на в блок РБ-2 на обмотку його реле Р3 і нормально-відкриті контакти цього реле нормально-замкнуті контакти Р11 і Р8 блоку РБ-2 напруга +27в поступає на блок БГМК-2. Реле Р1, Р2 блоку БГМК-2 через нормально-замкнуті контакти підключають споживачів сигналів гіромагнітного курсу до статорної обмотки сельсин-датчика М3 блоку БГМК, вісь ротора який опрацьовується слідкуючою системою по сигналам гіромагнітного курсу, який поступає до основного гіроагрегата.
При включенні магнітної корекції контрольного гіроагрегату споживачі сигналів гіромагнітного курсу залишаються підключеними до статорної обмотки сельсин-датчика М4 блоку БГМК-2 і під час корекції контрольного гіроагрегату отримується сигнали гіромагнітного курсу відносно «заповненого» магнітного меридіану (так як корекція сельсина М4 від корегуючого механізму не проводиться).