

Режим гіронапівкомпаса
Основним режимом роботи системи є режим гіронапівкомпаса. В цьому режимі система видає ортодромічний курс з точністю, яка визначається «дрейфом» гіроскопа в азимуті і похибкою його начальної виставки. Величина дрейфу в основному залежить від якості гіроскопа гіроагрегата і від точності вводу гіроскоп широтної правки, яка вводиться для компенсації «уявного» відходу, який викликаний наявністю обертання Землі (рис.13). ТКС має систему зручного та автоматичного вводу широтної корекції. Системи ручного вводу широтної корекції (розглядається на один агрегат) складається з стабілізатора напруги, блока широтних потенціалів R1, R2 (R3), розташованих на пульті управління, підсилювач типа УШК, інтегруючого двигуна М1 (типа ІЕ-1М), редуктора і курсового сельсина гіроагрегата М3 (типа 913А), розташованого в гіроагрегаті.
Потенціометри R1, R2 (R3) включені в мостову схему, яка живиться постійною напругою від малогабаритного напівпровідникового стабілізатора.
Потенціометри R1, що задає. Положення движка на ньому знаходиться в синусоїдальній залежності від широти місця. Широта місця індикується на шкалі пульта і може встановлюватися в межах 0°-90° як північної, так і південної широти.
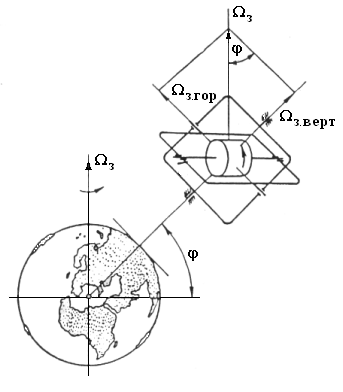
рис.13. «Який здається» відхід гіроскопа. ΩЗ – кутова швидкість обертання Землі; ΩЗверт – вертикальна складова кутової швидкості Землі; ΩЗгор – горизонтальна складова кутової швидкості Землі; φ - широта місця.
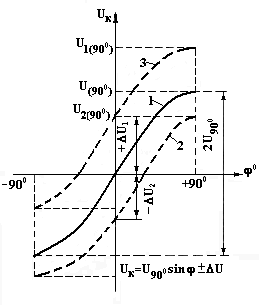
рис.14. Характеристика сигналу корекції, формуючого в пульті управління:

Рис.15. Схема системи широтної корекції:
ИЭ-1М – двигун генератор; ТГ
– тахогенератор; УШК – підсилювач
широтної корекції; СН – стабілізатор
напруги;
![]() - широта місця;
- широта місця;
![]() - потенціометр широтної корекції;
- потенціометр широтної корекції;
![]() - сигнал живлення потенціометра широтної
корекції;
- сигнал живлення потенціометра широтної
корекції;
![]() - напруга з тахогенератора;
- напруга з тахогенератора;
![]() - вхідна напруга підсилювача;
- вхідна напруга підсилювача;
![]() - сигнал напруги на вході моста;
- сигнал напруги на вході моста;
![]() - балансувальний сигнал;
- балансувальний сигнал;
![]() - обмотка збудження двигуна;
- обмотка збудження двигуна;
![]() - управляюча обмотка двигуна;
- управляюча обмотка двигуна;
![]() - широтний сигнал;
- широтний сигнал;
![]() - потенціометр балансувальний.
- потенціометр балансувальний.
Потенціометри R2 для основного гіроагрегата і потенціометри R3 для контрольного гіроагрегата є юстировочними, які призначені для електричної компенсації постійного розбалансу гіроскопів. Управління цими потенціометрами виведено під шліц на лицьову панель пульта.
Потенціометри R2, R3 названі балансувальними і разом з R1 формують широтний сигнал для основного і контрольного гіроагрегататів відповідно.
Прикладовий характер сигналу, який вибирається блоком широтних потенціометрів, який представлений на рис. 14
Сформований сигнал з штирків 18, 19 і 16, 17 роз’єму Ш1 пульта управління подається на штирки 5, 19 роз’ємів гіроагрегатів. Різниця uвх між напругою з пульта і напругою, яку знімаємо з тахогенератора інтегруючого двигуна ІЕ-1М, подаються на вхідні штирки 1,2 штепсельного роз’єму підсилювача УШК, який вбудований в гіроагрегат. Цей сигнал постійного струму перетворюються в змінний і через контакти реле азимутальної корекції потрапляє на вхід підсилювача, підсилює і подається на управляючу обмотку двигуна ІЕ-1М, яка розвиває швидкість, необхідну для того, щоб сигнал uвх прагне до 0.
Таким чином, швидкість обертання ІЕ-1М, строго пропорційний сигналу, який поступає з пульта управління
На рис. 15 представлена принципова схема системи широтної корекції. Це схема так званого інтегруючого приводу постійного струму. Вхід цієї системи – поворота вала інтегруючого двигуна ІЕ-1М – пропорційний інтегралу від вхідної величини (опорної напруги uк).
Точність роботи такої системи в цілому залежить, при дестабілізації характеристики тахогенератора, який для ІЕ-1М не залежить від коливань напруги живлення, так як магнітне поле тахогенератора ІЕ-1М утворюється постійним магнітом. Атак як напруга живлення моста потенціометрів стабілізована, робота інтегруючого приводу майже не залежить від коливань напруги, який живить підсилювач, збуджує обмотку двигуна інтегратора і стабілізатора.
Вал ІЕ-1М через редуктор обертає статор курсового сельсина в сторону протилежну обертанню Землі, з кутовою швидкістю:
![]()
Де
величина
![]() - дрейф постійного розбалансу. Величина
і
загальному випадку різноманітні для
кожного із гіроагрегатів і лежить в
межах ±3 град/ год. Ця величина компенсується
розворотом балансуючих потенціометрів
і визначається необхідністю регулювання
гіроагрегатів і при їх заміні і при
проведенні регламентних робіт.
- дрейф постійного розбалансу. Величина
і
загальному випадку різноманітні для
кожного із гіроагрегатів і лежить в
межах ±3 град/ год. Ця величина компенсується
розворотом балансуючих потенціометрів
і визначається необхідністю регулювання
гіроагрегатів і при їх заміні і при
проведенні регламентних робіт.
Автоматична система введення широтної корекції відрізняється лише тим, що широтний потенціометр пульта управління R1 перемикачем В1 цього пульта заміняється на точно такий самий , але розташований на навігаційному обчислювачі. Положення движка цього потенціометра автоматично змінюється зі зміною широти місця.