

Структурна схема ткс-п2
Курсова система в комплектації ТКС-П2 відрізняється, це видно з структурної схеми, яка наведена на рис.5, по-перше відсутністю в комплектації показових приладів і, по-друге , тим, що гіромагнітний курс в цій системі виробляється в окремому блоці БГМК-2, крім того, в цю комплектацію не входять за датчик курса і блок пеленгів БП-5.
Блок БГМК-2 получає необхідний сигнал гіроскопічного курса при нормальні роботі системи з основного гіроагрегата. Блок видає як гіроскопічний курс з сельсина-датчика споживача, так і гіромагнітний курс з сельсина-датчика, формуючого гіромагнітний курс.
Перша початкова виставка в цій комплектації може здійснити як в режимі МК по сигналам від ІД-3, так і в режимі АК по сигналам астрокомпасу.
В іншому функціональна схема ТКС-П2 і взаємодія блоків аналогічно описаним для компенсації ТКС-П.
Електрокінетична схема взаємодії основних елементів
Електрокінематична схема взаємодії елементів схеми в найбільш повній комплектації ТКС-П представлена на рис.9.
Гіроагрегати системи являє собою триступеневі орієнтовані в азимуті астатичні гіроскопи, розташовані в додатковій рамці, стабілізовані по крену в площині горизонту за допомогою сельсивної слідкуючої системи польотної гіровертикалі. Стабілізація курсового гіроскопа крену усувають виникнення кардинальних похибок курсового гіроскопа.
Сигнал курса знімають з сельсина, одна частина якого (ротор) жорстко закріплена вимірювальній вісі гіроскопа, а друга (статор) може приводити до обертання відносно корпуса приладу двигуном М1 через редуктор з електромагнітної муфти ЕМ.
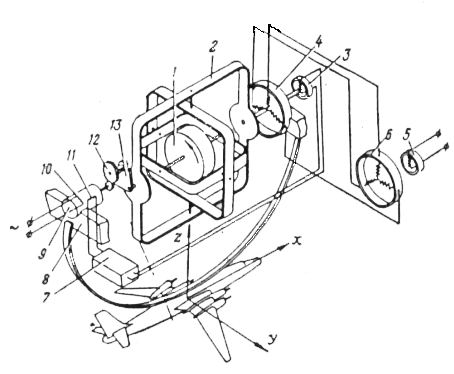
Рис.10. Принципова схема стабілізації курсового гіроскопа по крену:
1 – курсовий гіроскоп; 2 – додаткова рамка гіроскопа; 3 – ротор сельсин-приймача; 4 – статор сельсин-приймача; 5 – ротор сельсин-датчика гіровертикалі; 6 – статор сельсин-датчика гіровертикалі; 7 – підсилювач; 8 – корпус гіроагрегату; 9 -0 двигун, який опрацьовує; 10 – обмотка збудження; 11 – управляюча обмотка; 12 – редуктор; 13 – зубчастий сектор; x,y і z – осі літака.
Для забезпечення можливості роботи курсового астатичного гіроскопа, як датчика ортодмічного курса необхідно вводити корекцію, яка забезпечує компенсацію вертикальної складової обертання Землі. Ця корекція залежить від широти місця і тому прийнято називати широтною. Корекцію «вільного» гіроскопа в азимуті по сигналам різних датчиків курса прийнято називати азимутальною.
Азимутальна та широтна корекція гіроагрегата здійснюються одним і тим самим азимутним двигуном М1, який розвертає статор курсового сельсина. Корекція гіроагрегата на обертання Землі (широтна корекція) здійснюється в режимі ГПК. Азимутальний двигун М1 гіроагрегата в цьому режимі управляється через спеціальний підсилювач (підсилювач широтної корекції) по сигналам з широтним потенціометром, розташованих на пульті управління (на схемі не показані) чи в навігаційному обчислювачі. Двигун М1 працює в режимі інтегруючому привода, забезпечує ввід виправлення обертання статора курсового сельсина.
Режим азимутальної корекції визначається положенням перемикача В2, розташованого лицьової сторони пульта управління. Режим роботи підсилювача і двигуна М1 управляє реле азимутальної корекції того чи іншого гіроагрегата в залежності від того , записано чи забезпечено на реле Р3, розташоване в розподільному блоці РБ2.
Нормально-замкнуті контакти реле азимутальної корекції визначають роботу підсилювача в режимі широтної корекції. При цьому статор курсового сельсина розвертається з такою самою швидкістю, як і корпус гіроагрегата, який обертається разом з Землею, але в зворотньому напрямку.
Підсилювач з реле азимутальної корекції закріплений на корпусі гіроагрегата.