

Основні технічні дані
Похибка дистанційної передачі курсу………………±9 кутових хвилин
Напруга живлення постійний струм……………………………27 В±10%
Прилад вібростійкий і віброміцний при перевантаженні від вібрацій:
з амплітудою не більш 0,5мм при частотах від 15 до 20гц, з прискоренням
вимірюються лінійно від 0,7g при частоті 20гц до 1,1g при частоті 80гц.
Прилад, що допускає ударні перевантаження від
прискорення 4g при частоті 40-100 ударів у хвилину.
Спільна кількість ударів…………………………………………..10000
Робочий діапазон температур
зовнішнього середовища…………………………………….….від +50 до -60°С
Вага……………………………………………………………...не більш 1,5кг
Блок живлення бп Призначення та принцип дії
Блок живлення призначений для отримання напруг, необхідних для живлення радіоламп підсилювачів ГКУ, УШК збуджені віброперетворювачем.
Блок живлення складається з силового трансформатора ТР1, двох випряних схем і розташованих в гіроагрегаті ГА-3.
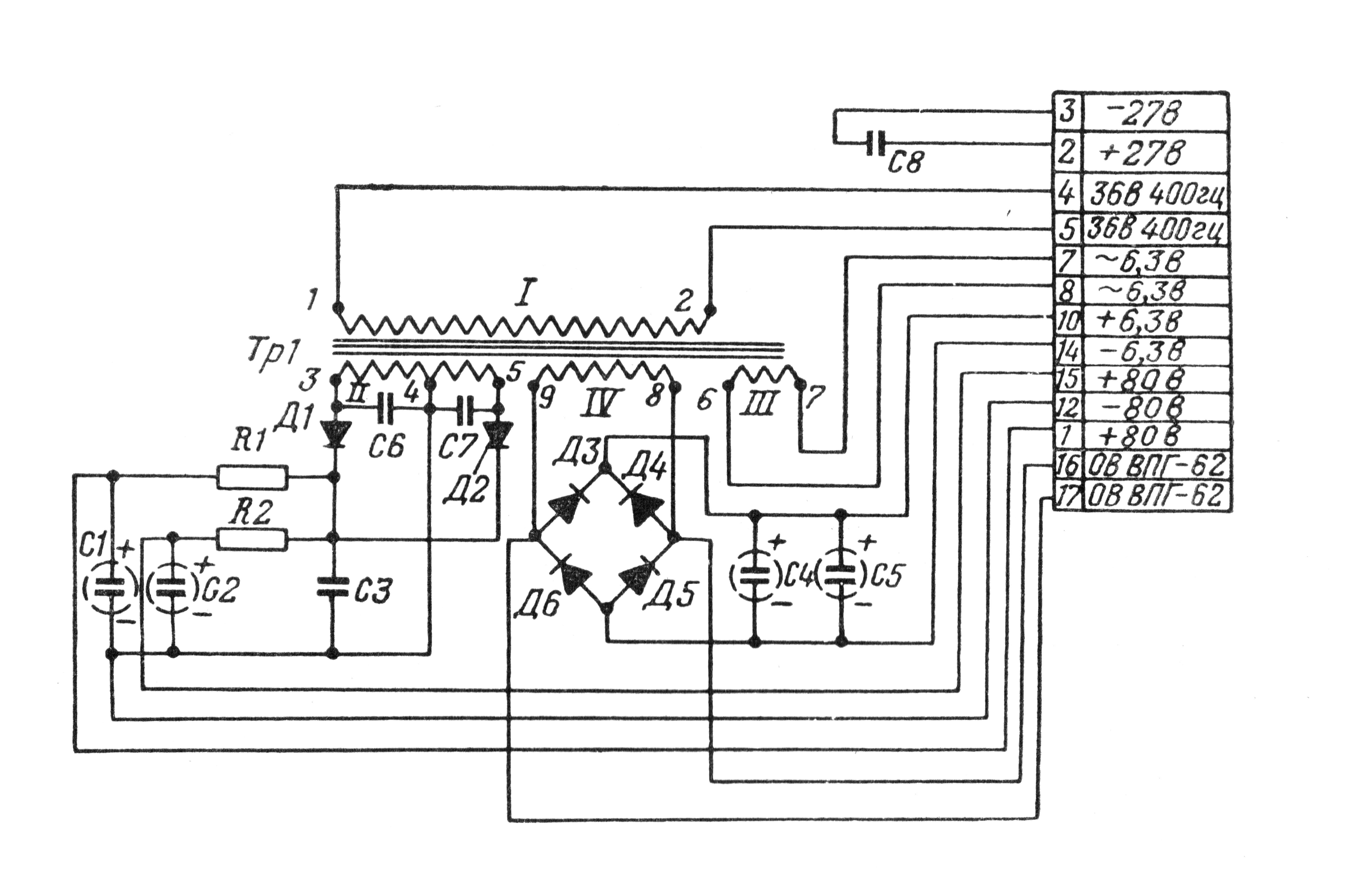
Змінна напруга 36 В .400 гц поступає на первинну обмотку І (див.рис.87) силового трансформатора. Зі вторинної обмотки ІІ трансформатора підвищеної напруги поступає на двонапівперіодичний випрямляч, зібраний на діодах Д1 і Д2. випрямлена напруга поступає на два П-образних зглажуючих фільтра, зібраних на опорах R1 і R2 і конденсаторах С1, С2 і С3. отримана постійна напруга подаєтьна аноди радіоламп підсилювачів ГКУ і УШК.
З обмотки ІV трансформатора напруги потупає на випрямляч, зібраний по мостовій схемі на діодах Д3-Д6.
Конденсатори С4 і С5 згладжують пульсації випрямляча струма. Отримана постійна напруга величиною 6,3 в забезпечує розжарення радіолампи підсилення ГКУ.
З обмотки ІІІ трансформатора знімається напруга живлення розжарювання лампи підсилювача УКШ змінною напругою, яка дорівнює
6,3 в.
Конденсатори С6, С7 і С8 служать для усунення радіозавад.
Конструктивно блок живлення представляє собою металічну основу, на якій розташовані силові трансформатор і дві плати, на яких тримається діоди (на металічній платі), резистори і конденсатори (на гетинаксовій платі). До корпуса гіроагрегата блок живлення закріпленого чотирма гвинтами.
З’єднання зі схемою проводяться розпайкою відповідних приводів. Маркування кінців, вказаних на рис.87, технологічна і при монтажі блоку в гіроагрегат знімається.
Основні технічні дані
Напруга живлення……………………………………………..36 В±5%
частотою………………………………………………………..400 гц±2%
Температурний діапазон………………………………….….від +50 до -60°С
Споживчий струм (змінний)…………………………………50 ма
Напруга, яка видається (під навантаженням):
анодна напруга постійного струму для підсилювача ГКУ…….80-100 в
анодна напруга постійно струму для підсилювача УШК……80-100 в
розжарювальна напруга постійного струму для
підсилювача ГКУ………………………………………………….6,3 в±0,2 в
розжарювальна напруга постійного струму для
підсилювача УШК………………………………………………….6,3 в±0,2 в
напруга змінного струму для живлення ВПГ-62…………………7 в±0,3 в
Вага……………………………………………………………...не більш 0,2кг
Індукційний датчик ід-3
При виборі місця розміщення і монтажі індукційного датчика ІД-3 на літаку необхідно забезпечити виконання наступних вимог:
1. Індукційний датчик встановлюються там де феромагнітні маси літака утворюють мінімальне постійне спотворення магнітного поля Землі, не перевищує ±3º.
2. В місцях установки датчика вплив роботи електричних агрегатів і пристроїв літака не повинно викликати додаткових похибок індукційного датчика.
3. Датчик закріплюється жорстко до антимагнітної полиці антимагнітними гвинтами, гайками і іншими кріпильними деталями.
4. Плоскість вушок корпуса датчика повинна бути горизонтальна (з точністю ±1°) при положенні літака в лінії горизонтального польоту.
5. Нанесена на кришці датчика стрілка з написом «Направлення польоту» повинна бути направлена до носової частини літака, а відповідні реперні ризики на корпусі датчика повинні співпадати з будівельною продольною віссю літака (з точністю ±5°).
6. Датчик повинен бути заземлений за допомогою металічної опльотки, з’єднаною з гвинтом для металізації.
Габаритні розміри та інші дані, необхідні для монтажу індукційного датчика на літаку, наведені на рис. 92. Для кріплення датчика до літака в його основі передбачені три продовгуватих овальних прорізи. Ці прорізи дозволяють здійснити розворот датчика в межах ±20° при встановленні установочної похибки датчика. Відлік при цьому проводиться по одній з шкал, передбачених для зручності відліку з трьох місць основи через 120°. Усунення на півколової дивіації здійснюється спеціальним девіаційним приладом, розташованим на кришці приладу, усунення четвертної дивіації проводиться механічним лекалом колекційного механізму. КМ-5.
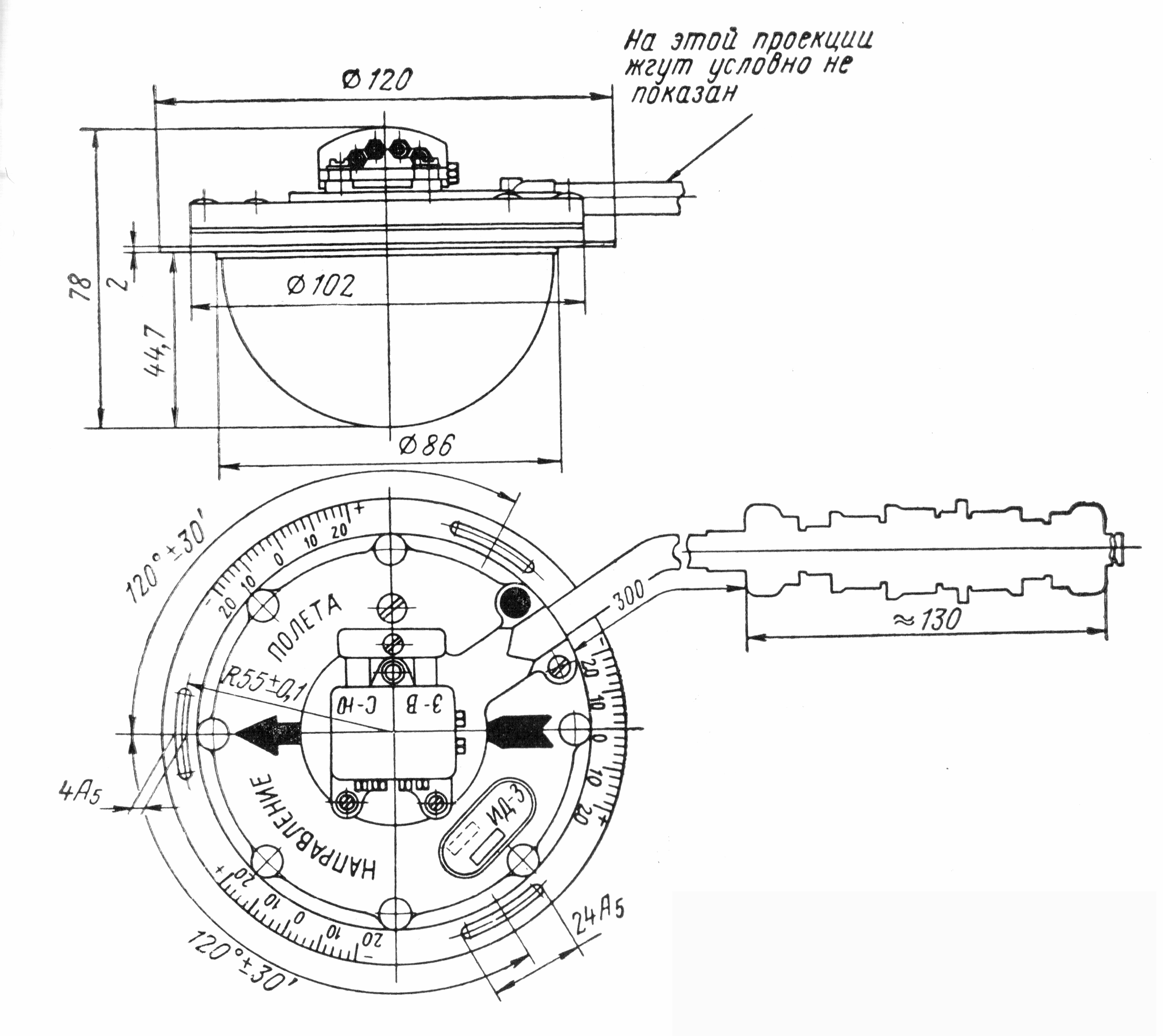
Рис
Треба мати на увазі, що в місцях, де проводяться девіаційні роботи, пред’явити наступні вимоги.
Девіаційні роботи в спеціально відведеному місці на девіаційному повороті антимагнітному колі чи ґрунтовій і бетонній площадці, де магнітне поле однорідно, постійно і не міняється у плині дня більш чим на ±25º, а горизонтальна складова Н повний вектор напруженості магнітного поля Землі змінюється не більш ніж 0,005 э (500 гамм).
При проведенні девіаційних робіт на літаку повинно бути встановлено і увімкнене усе його штатне обладнання.
Літак і пеленгатор повинні знаходитися на відстані не менш 150-200м від стальних конструкцій, споруд, побудов, підземних і наземних електричних передач і ін. могучих визвати девіації як по величині, так і по направленню більш чим ±25º.
Пеленгування літака повинно знаходитись по реперним точкам на літаку, який повинен строго відповідають продольній будівельній вісі літака.
Під час девіаційних робіт до площадки не повинен наближуватись транспорт і інші стальні маси, які можуть змінювати магнітне поле Землі.
При всіх девіаційних роботах індекс магнітного відмінювання на корегуючому механізмі КМ-5 повинен на відмітку «0».
Електричне при’єднання індукційного датчика ІД-3 до курсової системи на літаку здійснюється на літаку за допомогою джгута, який має довжину 300мм і закінчується вилкою 2РТ18КПН7Ш1В1Т, у строгому з однією з схем кабельних з’єднань системи, наведена на рис. 102 і 103.