Максимальное количество ударов каждым пальцем в течение 15 сек (по Дворжаку)
Палец |
Левая рука |
Правая рука |
Мизинец . . . Безымянный . . Средний . . . Указательный |
48 57 G3 66 |
56 62 69 70 |
Если при выполнении ударных движений рабочие пальцы попеременно меняются, темп может быть увеличен. Как показали измерения, интервал между движениями одного и того же пальца равен 0,09 сек, между движениями разных пальцев одной руки — 0,03 сек, а между движениями пальцев разных рук — 0,02 сек [408].
В некоторых видах деятельности требуются синхронные ударные (или нажимные) движения пальцев обеих рук. Этот вопрос изучался Д. Ковачем [421], который разделил все возможные комбинации синхронных движений на три группы 'по показателям точности и скорости реакций. Наиболее эффективными являются соче-
1 Однако (выдержать этот темп длительное время трудно. Для большинства людей 'предпочитаемым, т. е. оптимальным, является темп от 1,5 до 5 ударов в 1 сек.
381
тания одноименных пальцев (за исключением средних), т. е. 1 л—1 п, 2 л — 2 п, 4 л — 4 п, 5 л — 5 п. Затем следуют сочетания: 5 л—1 п, 4 л — 2 п, 3 л — 3 п, 2л — 4 п, 1л — 5 п. Наконец, 4л — 3 п, 3 л — 4 п1. Трудности координации движений пальцев значительно возрастают, если они выполняются при перекрещивании РУК.
Амплитуда ударных движений влияет на их темп незначительно. Однако слишком малые и слишком большие движения выполнить несколько труднее. Оптимальной является амплитуда около 20 мм. Движения относительно горизонтальной плоскости могут совершаться в более высоком темпе, чем относительно вертикальной.
Наконец, эффективность ударных движений зависит от того, участвуют ли в их выполнении только пальцы или вся рука. В последнем случае достигается более высокий темп. Это, по-видимому, является результатом включения в двигательный акт приспособительных движений, повышающих пластичность работающей руки.
По мере тренировки повторяющиеся движения становятся ритмичными2. Решающую роль в образовании ритма играет кинестическая (и отчасти тактильная) сигнализация, на основе которой формируется внутренний контур регулирования. При этом интервалы между отдельными движениями дискретного ряда начинают приближаться к времени прохождения управляющего сигнала по внутреннему контуру, что и. обеспечивает высокий темп.
В том случае, когда движения выполняются в ответ на ряд дискретных экстероцептивных сигналов, т. е. регуляция осуществляется по «внешнему» контуру, их темп оказывается значительно более медленным. По данным С. В. Тэлфорда [487] и М. А. Вине [495], для того чтобы человек мог отреагировать на- каждый сигнал, интервалы между ними должны быть не менее 0,5 сек. Если сигнал для второго движения подается через более короткий промежуток времени, то реакция на него задерживается: она не начинается раньше завершения реакции на первый сигнал. По данным
1 1 — большой палец, 2 — указательный, 3 — средний, 4 — бе зымянный, 5 — мизинец; л — левый, п — правый.
2 В частности, это былЪ показано в исследовании автора [192, 193].
382
Р. Дэвиса [376], задержка происходит лишь при интервалах, меньших 0,25 сек. Ее величина (добавка к времени второй реакции) равна разности латентного периода реакции на первый сигнал и величины интервала между сигналами:
где Те — время задержки (добавка к лп второй реакции); Т —латентный период реакции на первый сигнал;
/Г1Гя—интервал между первым и вторым сигналами.
Авторы считают, что задержк-а объясняется «психологической рефрактерной фазой», необходимой для организации и начала двигательного акта.
При высоком темпе сигналов задержки аккумулируются и возникает «психологическая блокировка» (mental block, по А. Ж. Билу [347]). Это выражается в пропуске сигналов и появлении реакции с большими латентными периодами,
По данным экспериментов А. А. Крылова и А. Ф. Пахомова, зависимость латентного периода простой сенсомоторной реакции на второй сигнал от интервала между первым и вторым сигналами имеет сложный характер [169]. При изменении интервала от 0 до 0,09 сек, он сокращается (от 0,21 до 0,16 сек), а затем возрастает, достигая максимума ( — 0,25 сек) при интервале 0,27 сек. При увеличении интервала до 0,067 сек латентный период реакции на второй сигнал становится равным латентному периоду на первый (рис. 84).
Сокращение латентного периода реакции на второй сигнал при уменьшении интервала авторы объясняют тем, что для испытуемых временная и пространственная неопределенность появления сигналов в их экспериментах была сведена до минимума. Исходя из этого, можно предполагать, что реакция на второй сигнал начинала формироваться уже во время восприятия первого сигнала, т. е. испытуемое реагировали парой реакций на временной комплекс пары сигналов. Когда же интервал между сигналами достигал величины времени первой реакции, требовались уже раздельные реакции (если бы испытуемый реагировал на комплекс, то вторая реакция была бы преждевременной). Возникала задача диф-
383
ференцирования поступающей пары сигналов во времени, что и сказалось в увеличении латентного периода реакций на второй сигнал. При возрастании интервала до 0,67 сек появилась палная возможность осуществлять каждую реакцию независимо (необходимость дифференцирования сигналов по времени появления была
\0,23
с
<^L
|
|
|
|
|
|
|
|
~Г |
|
|
|
|
|
|
|
|
|
А |
л~ |
|
|
! |
? |
|
|
|
|
|
у*Л |
_ |
^ |
/ |
|
|
|
|
|
|
|
|
|
|
|
7 |
|
■*\г |
|
|
/ |
|
|
|
|
|
|
< |
/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
чх |
г |
|
|
|
|
|
|
|
|
|
|
|
0,1 0,2 0,3 0,4 0,5 0,6 Интербал межйу сигналами, сен
Рис. 84. Зависимость времени простой сенсомотор-иой .реакции от интервала между .сигналами:
/ — время реакции на перный сигнал; 2 — время реакции на второй сигнал.
снята). Иначе говоря, ди-иамика соотношений латентных периодов реакций определяется условиями и особенностями формирования регулирующих образов.
Если сигналы подаются ритмично, то по мере тренировки человек усваивает их временную структуру; появляется возможность предугадывания. Способ регуляции движений перестраивается: они начинают регулироваться не отдельными сигналами, а их временными комплексами. В этом случае реакция на последующий сигнал может быть начата раньше, чем завершилась реакция на первый, что позволяет увеличить темп. Примером проявления этой закономерности является работа опытных машинисток, перфористок и телеграфистов.
В. Третий класс двигательных задач наблюдается при манипулировании с органами управления, предназначенными для настройки аппаратуры и точной нацеленной установки управляемого объекта. В этом случае необходимо д оз и р ов а н и е .движений по их силовым, пространственным и временным параметрам в соответствии с некоторой заданной мерой.
Основным фактором, определяющим их динамику, является требование точности дозировочных реакций. Это отчетливо обнаруживается при сравнении свобод-
384
пых размашистых движений с движениями заданной амплитуды. По данным автора, во втором случае латентный период, так же как и время моторного компонента, возрастает в 1,5—2 раза по сравнению с первым случаем [192]. При выполнении размашистых движений скорость сначала быстро возрастает, достигая некоторого максимума, а затем резко падает. Характер изменения скорости движений заданной амплитуды иной: вначале она возрастает, затем удерживается некоторое время на относительно постоянном уровне \(но ниже возможного максимума), а затем медленно уменьшается. По-видимому, такой характер «кривой» изменения скорости дозировочного движения обусловлен дифференцировочным торможением.
Вопрос о дозировании усилий изучался в нашей лаборатории Г. В. Суходольским. Испытуемым предлагалось совершать ряд нажимных движений (нажимы на закрепленный рычаг), изменяя усилие на минимальную величину. Регистрация производилась с помощью тен-зометрической установки. Средняя величина «дифференциального порога» произвольной регуляции усилия оказалась равной 18—25%. При незначительной тренировке она сократилась до 10—15% 1- В опытах, где требовалось увеличивать силу нажима, порог был больше примерно на 1,5% (т. е. точность регуляции ниже), чем в опытах, требовавших ее уменьшения. Эксперименты выявили значительные индивидуальные различия. Результаты измерений представлены на рис. 85.
Для настройки и точной нацеленной установки обычно применяются органы управления, требующие вращательных движений руки. Как показал Н. Г. Ле-вандовский [177], латентный период и время выполнения самого движения зависят от направления поворота. Так, движения правой руки вправо (изнутри — наружу) начинаются позже, но совершаются быстрее, чем движения в обратном направлении (снаружи — внутрь).
В экспериментах А. Чапаниса [356] изучалась точность установки рукояток при повороте их из одного положения в другое (без визуального контроля). Было показано, что наибольшая точность достигается при
1 Приведенные данные шолучены при измерении «дифференциального порога» дозирования усилий от 200 до 4500 г.
25—2286
385
установке рукояток на 0; 90 и 180°. Положения между О и 90° дают небольшие положительные постоянные ошибки, а положения между 90 и 180°—отрицательные. Следовательно, положение рукоятки оценивается как более вертикальное, чем оно есть в действительно-
 t'i
i
i I i (
i
i i I i i i ».
ю
го зо to
so 60
о ю го зо to
so oo
t'i
i
i I i (
i
i i I i i i ».
ю
го зо to
so 60
о ю го зо to
so oo
Дифференциальный порог, % а) 6-) .
Рис. 85. Кумулятивная кривая распределения величин
«дифференциального порога» произвольной регуляции
усилия (по данным Суходольского):
а—по показателям минимального изменения усилия (число
дат G00); б — по показателям сохранения постоянного урозня
(число дат 1800).
сти. В диапазоне 0—90° большая точность достигается в действиях правой руки, в диапазоне 90—180° — левой. Аналогичная картина наблюдается и при оценке установленного положения. Очевидно, достигаемая степень точности ограничена возможностями пространственно-двигательного различения.
Детальный анализ манипуляций с рукоятками и маховиками показывает, что дозировочные движения руки являются чрезвычайно дробными. По подсчетам Розе,
386
при одном повороте маховика всеми пальцами совершается более 100 микродвижений, что в 1,5—2 раза превышает количество микродвижений в манипуляциях с переключателями. Такая дробность, очевидно, естественна, так как дозировочные движения являются по существу измерительными К
Ведущая роль в манипуляциях с рукоятками принадлежит большому, указательному и среднему пальцам; остальные выполняют преимущественно функцию уравновешивания. При этом взаимодействие пальцев весьма динамично: наблюдается непрерывная «передача» движений от одного к другому.
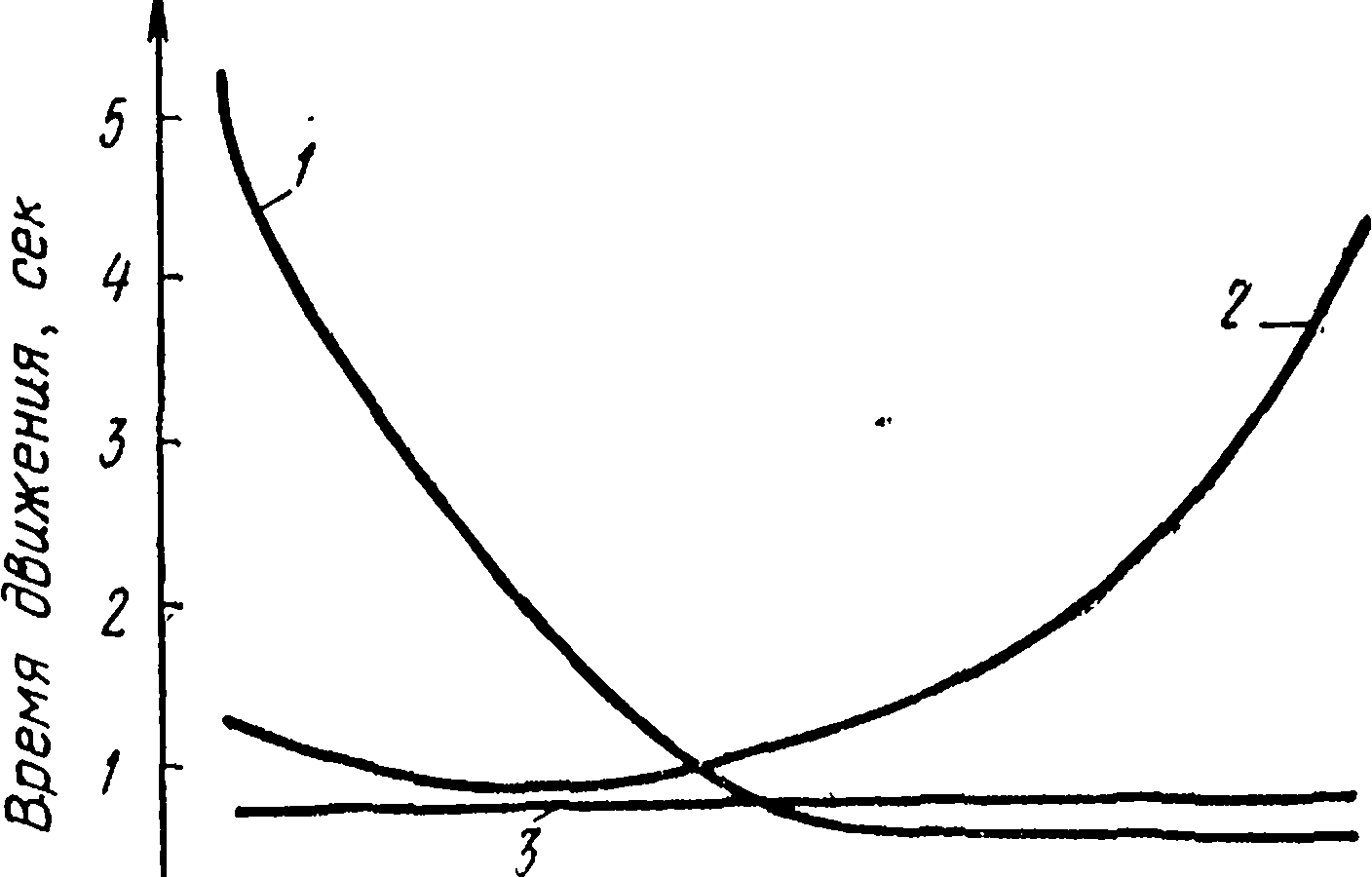
Неизбежным компонентом дозировочных реакций являются корригирующие движения. Их доля в общем времени манипуляции довольно значительна. По данным Дженкинса и Коннора [по 363], основным фактором, определяющим время как рабочих, так и корригирующих движений, является передаточное число, выражающее отношение между величиной поворота рукоятки и вызываемым им перемещением указателя (рис. 86). С увеличением передаточного числа время рабочих движений сокращается, а корригирующих возрастает. Оптимальным является такое отношение, при котором полный поворот рукоятки дает перемещение указателя на 2,5—5 см (область пересечения кривых).
В процессе формирования навыка корригирующие движения постепенно редуцируются. При этом наблюдается «преодоление» значения передаточного числа. Если вначале оператор ориентируется на фактическую скорость движения рукоятки, то позднее — на скорость указателя, «подстраивая» к ней движения рукоятки [177]. Иначе говоря, появляется тенденция свести до минимума влияние на результат действия передаточной функции устройств, связывающих орган управления с индикатором. В процессе формирования навыка перестраиваются регуляторные механизмы движения. Благодаря этому управляющее действие приближается к простому предметному действию, решающую роль в регуляции которого, как известно, играет непосредственный образ его объекта.
1 Как было показано автором {198] дискретность измерительных движений вытекает из самой сути измерения, которое состоит в количественном дроблении пространства.
25*
387
Г. Органы управления могут быть предназначены для операции слежения за изменяющимися объектами. Задачи, выполняемые оператором в процессе слежения, относятся к классу непрерывных перцептивно-моторных задач.
0\ I , , . . . . U
0,25 0,5 1,25 2,5 5 12,5 25 50 75
Передцточное число
Рис. 86. Зависимость рабочих и корригирующих движений руки от передаточного числа
(по В. Л. Дженкинсу и М. Б'. Коннору); / — время рабочего движения, сек; 2 — время корригирующего движения; 3 — латентный период дозировочной реакции, время в сек. Передаточное число равно:
перемещению указателя (в см) 1 полный оборот рукоятки
Типичным примером являются операции, при выполнении которых оператор должен непрерывно совмещать прицельное приспособление с движущимся сигналом.
Большинство исследователей различает два основных варианта слежения: а) слежение с преследованием и б) компенсирующее слежение. В первом, случае оператор воспринимает весь ход изменений как входного, так и выходного сигнала и должен сводить к нулю разностную ошибку. Во втором случае, решая ту же задачу, он воспринимает только разность между входным и выходным сигналами (ошибку).
Точность слежения с преследованием в 1,5—2 раза выше, чем компенсирующего (И. А. Адаме [336], Е. С. Поултон [465], И. И. Реган [467]). Это объясняется тем, что во втором случае оператору труднее контролировать свои действия и предвидеть ход изменений цели,
388
поскольку он воспринимает только сигнал об ошибке1.
Наиболее простым случаем слежения является преследование визуального сигнала, изменяющегося равномерно по одному параметру. Этот случай изучался в нашей лаборатории Водлозеровым [57—59]. Испытуемый наблюдал равномерное перемещение темной точки вдоль горизонтальной светящейся линии и должен был непрерывно совмещать с ней прицельную стрелку, приводимую в движение рукояткой. Передаточное число было 1:1. В разных опытах точка перемещалась со скоростью 1, 2, 4, 6, 8 и 10 мм/сек. Дистанция наблюдения 50—60 см. Слежение проводилось в течение 10 сек.
Эксперименты подтвердили данные зарубежных авторов (Адаме [336], Крейк [372], Вине [495]) о том, что преследующее движение, даже в самом простом случае, является дискретным. При этом с увеличением скорости метки количество парциальных движений изменяется. Изменяется также количество пауз и латентный период (время между началом перемещения метки и началом ответной реакции). Сводные данные представлены в табл. 23.
ТАБЛИЦА 23
Латентный период, количество парциальных движений и пауз в зависимости от скорости метки (по В. М. Водлозерову)
Скорость метки, мм/сек |
Начальный сигнал рассогласования, мм |
Латентный период, мсек |
Количество парциальных движений |
Количество пауз |
1 2 4 6 8 10 |
0,65 1,00 1,33 1,70 2,07 2,57 |
650 500 300 280 ! 256 256 |
17,7 20 26 20—30 28—30 28—20 |
6,7 6,1 4,0 2,0 1,6 1,7 |
Как видно из таблицы, латентный период с увеличением скорости движения метки сокращается, приближаясь к латентному периоду простой двигательной реакции. Сокращается также количество пауз, а количество парциальных движений увеличивается.
1 Точность слежения оцениваегся по времени, в течение которого прицельное шриспосабление (например, визир) совпадает с целью (например, движущейся меткой).
389
Более детальный анализ парциальных движений показал, что их длительность по мере слежения постепенно возрастает, а длительность пауз сокращается. Таким образом, прослеживающее движение становится все более непрерывным.
Операция слежения делится на два периода: 1) переходный и 2) установившийся.
Для переходного периода характерно наличие времени запаздывания (латентный период), а также большая дробность движений (значительное число пауз). Наблюдаются две формы переходного периода: колебательная с выбросами (перерегулирование) и колебательная без выбросов. При небольших скоростях преследуемой цели (1—4 мм/сек) преобладает первая форма, при более высоких (5—10 мм/сек) —вторая.
Переходный период длится 2—3 сек.
В установившемся режиме число и длительность пауз сокращается, т. е. преодолевается «время инерции», скорость парциальных движений приближается к скорости преследуемой цели. Показатели парциальных движений, скорость которых не совпадает со скоростью цели, стабилизируются. В целом движение становится плавным, хотя и неравномерным.
По-видимому, в процессе слежения при переходе от первого периода ко второму происходит перестройка регулирующего образа и самого механизма регулирования. По существу, в начале слежения имеется период ориентировки. Здесь наблюдается масса гностических и приспособительных движений. Ведущую роль в регуляции исполнительских движений играет внешний контур регулирования (глаз — двигательный аппарат руки). Зрительная система выполняет функцию измерения величины перемещения цели; кинестетическая — величины перемещения руки. На основе соизмерения зрительных и кинетических сигналов находится отношение величин перемещения цели и руки («передаточное число»).
В первый период происходит позиционное слежение, т. е. слежение по положению. Движения регулируются здесь теми сигналами, которые возникают при рассогласовании прицельной стрелки и преследуемой цели.
390
Й результате сличения и усреднения массы зрительных сигналов, отражающих величину и направление моментов рассогласования, а также кинестетических сигналов, отражающих характеристики исполнительских и корригирующих движений руки, формируется обобщенный регулирующий образ и появляется возможность оценки скорости преследуемой цели. От позиционного слежения испытуемый переходит к слежению по скорости. Это в свою очередь обеспечивает включение механизма зрительной экстраполяции движения, т. е. испытуемый начинает предвидеть характер изменений цели, что позволяет строить движение с учетом не только наличного, но и ближайшего ее состояния.
Нахождение «передаточного числа» и включение в деятельность механизма экстраполяции создает усло^ вия для активизации внутреннего контура регулирования (кинестезия — двигательный аппарат р^ки), благодаря чему и преодолевается время задержки: движения становятся непрерывными и более плавными1. В этих условиях основную роль в регулировании движений руки начинают играть кинестетические сигналы, а зрительная система выполняет главным образом функцию контроля.
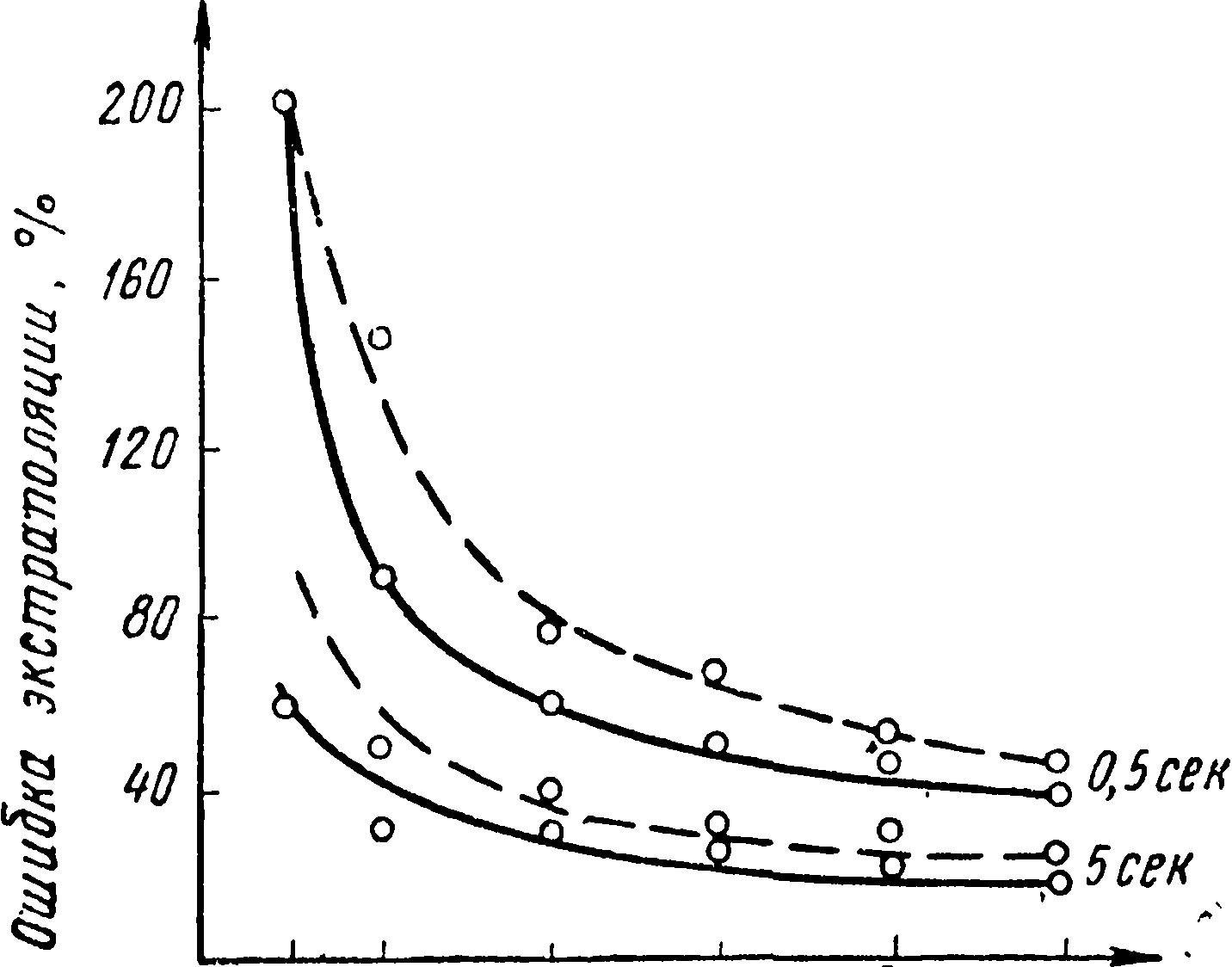
В одной из серий экспериментов Водлозероц предлагал испытуемым осуществлять слежение за целью в течение некоторого времени, а затем цель исчезла, но испытуемые должны были продолжать слежение по «мысленному образу». При этом в одних случаях они могли видеть прицельную стрелку, в других не видели пи цели, ни стрелки. Варьировалось время, в течение которого испытуемые могли наблюдать движение цели (от 0,5 до 5 сек) и скорость движения цели (от 1 до 10 мм). Эксперименты показали, что точность экстраполируемых движений зависит от длительности наблюдения и скорости движения цели. С увеличением длительности наблюдения от 0,5 до 2,5 сек (при сохранении возможности наблюдения за движением стрелки) и до 3,5 сек (если отсутствует эта возможность) ошибки экстраполяции сокращаются до некоторого постоянного уровня.
1 Как отмечалось ранее, время цикла регулирования для внутреннего контура в 3—4 раза меньше, чем для внешнего.
391
Иначе говоря, возможность экстраполяции появляется именно в начале установившегося режима слежения.
Точность экстраполируемых движений зависит также и от скорости цели. При небольших скоростях (1—4 мм/сек) наблюдается переоценка скорости цели. С увеличением скорости метки точность экстраполяции увеличивается (рис. 87).