

Сила руки (кг) при выполнении движений в разных направлениях (средние величины, полученные при обследовании 55 мужчин) (по Мак-Кормику)
Положение руки, град1 |
Левая рука |
Правая рука |
Левая рука |
Правая рука |
|
Вытягивание (на себя) |
Толкание (от себя) |
||
180 |
52,5 |
54,4 |
57,1 |
62,6 |
150 |
50,7 |
55,3 |
50,3 |
55,7 |
120 |
42,6 |
47,1 |
44,9 |
46,7 |
90 |
36,3 |
39,9 |
37,6 |
38,9 |
60 |
29 |
38,6 |
36,2 |
41,7 |
|
Вытягивание (вверх) |
Толкание (вниз) |
||
180 |
18,6 |
19,5 |
16 |
18,6 |
150 |
23,6 |
25,4 |
18,6 |
21,3 |
120 |
24,5 |
27,2 |
23,1 |
26,3 |
90 |
23,6 |
25,4 |
22,2 |
24 |
60 |
19,9 |
22,2 |
20,8 |
23,1 |
|
Приведение (к себе) |
Отведение (от себя) |
||
180 |
19,5 |
22,6 |
13,6 |
15,4 |
150 |
21,3 |
24,4 |
13,1 |
15 |
120 |
20,4 |
24 |
13,6 |
15,4 |
90 |
21,7 |
22,6 |
15 |
16,8 |
G0 |
22,6 |
23,5 |
14,5 |
19 |
1 Положение выражено величиной угла, образованного плечом н сагиттальной осью тела.
в полтора раза; при этом Т-образная ручка имеет преимущество перед Г-образной [360].
Характеризуя силовые параметры движений, мы привели только средние величины. Между тем ранг их индивидуальных (и возрастных) вариаций весьма значителен: люди могут различаться по физической силе в 2—3 раза и более. Один из крупнейших специалистов по инженерной психологии Мак Фэрланд [442, 443] рекомендует при расчетах органов управления исходить из показателей не среднего по силе человека, а более слабого, так как в критических ситуациях даже средний человек может оказаться не в состоянии выполнять движения, требующие большой силовой нагрузки.
Перечисленные данные об основных параметрах двигательного аппарата человека указывают на оптималь-
24—2286 369
ный и предельно возможный режимы его работы. Они позволяют определить лишь самые общие требования к конструкции органов управления (в отношении допустимой амплитуды, скорости и сопротивления), но еще не дают оснований для решения вопроса о выборе такой конструкции, которая обеспечила бы необходимую точность и надежность действий оператора. Его и нельзя решить, исходя только из механических свойств двигательного аппарата. В этой связи необходимо обратиться к другому аспекту анализа моторики — к проблеме р е-гуляции рабочих движений. Значение этой проблемы для инженерной психологии тем более важно подчеркнуть, что с развитием техники энергетические, исполнительно-технологические и транспортные функции передаются машинам, а за человеком остается функция программирования и управления производственными процессами. Эффективность же выполнения этих функций в значительной мере зависит от способов, от скорости и точности произвольной регуляции человеком рабочих движений, воздействующих на органы управления.
Как отмечалось, научные основы учения о регуляции рабочих движений были заложены И. М. Сеченовым. Большой вклад в это учение внес И. П. Павлов.
Идеи Сеченова и Павлова нашли дальнейшее развитие в трудах советских психологов и физиологов (Н. А. Бернштейн, П. К. Анохин, А. В. Запорожец, А. Н. Леонтьев, А. Р. Лурия, А. Ц. Пуни, Л. М. Веккер и др. (8, 10, 22, 23, 44, 45, 117, 265]).
В многочисленных исследованиях были выявлены некоторые конкретные закономерности рефлекторных механизмов двигательного акта, выяснена роль «сенсорных коррекций» и «обратной афферентации» в построении движений, изучены некоторые характеристики ней-родинамики и т. д.
Идея программирующей, регулирующей и корригирующей функции отражательных процессов находит все более широкое распространение и в исследованиях зарубежных ученых. В этой связи серьезный интерес представляют работы, раскрывающие особенности координации движений (Р. М. Барнес [34,1], Е. А. Флейшман [389]), процессов временного согласования ответных двигательных реакций с воспринимаемыми сигналами (timing) (А. Т. Велфорд [497]), роль «чувства ясного
370
контроля» и антиципации (К. Дж. В. Крейк [372]) в регуляции движений. Подводя итоги экспер-иментальным исследованиям английских психологов, крупнейший специалист по проблеме навыка, Ф. Бартлетт |[343] пришел к выводу- о том, что сенсорные сигналы не только пускают в ход эффекторный аппарат, но направляют и регулирует его.
В исследованиях, «проведенных в последние годы, все более подчеркивается существенная роль сигналов обратной связи, возникающих при выполнении движений, в организации действия. По современным 'научным представлениям в основе механизма двигательных актов лежит рефлекторное кольцо.
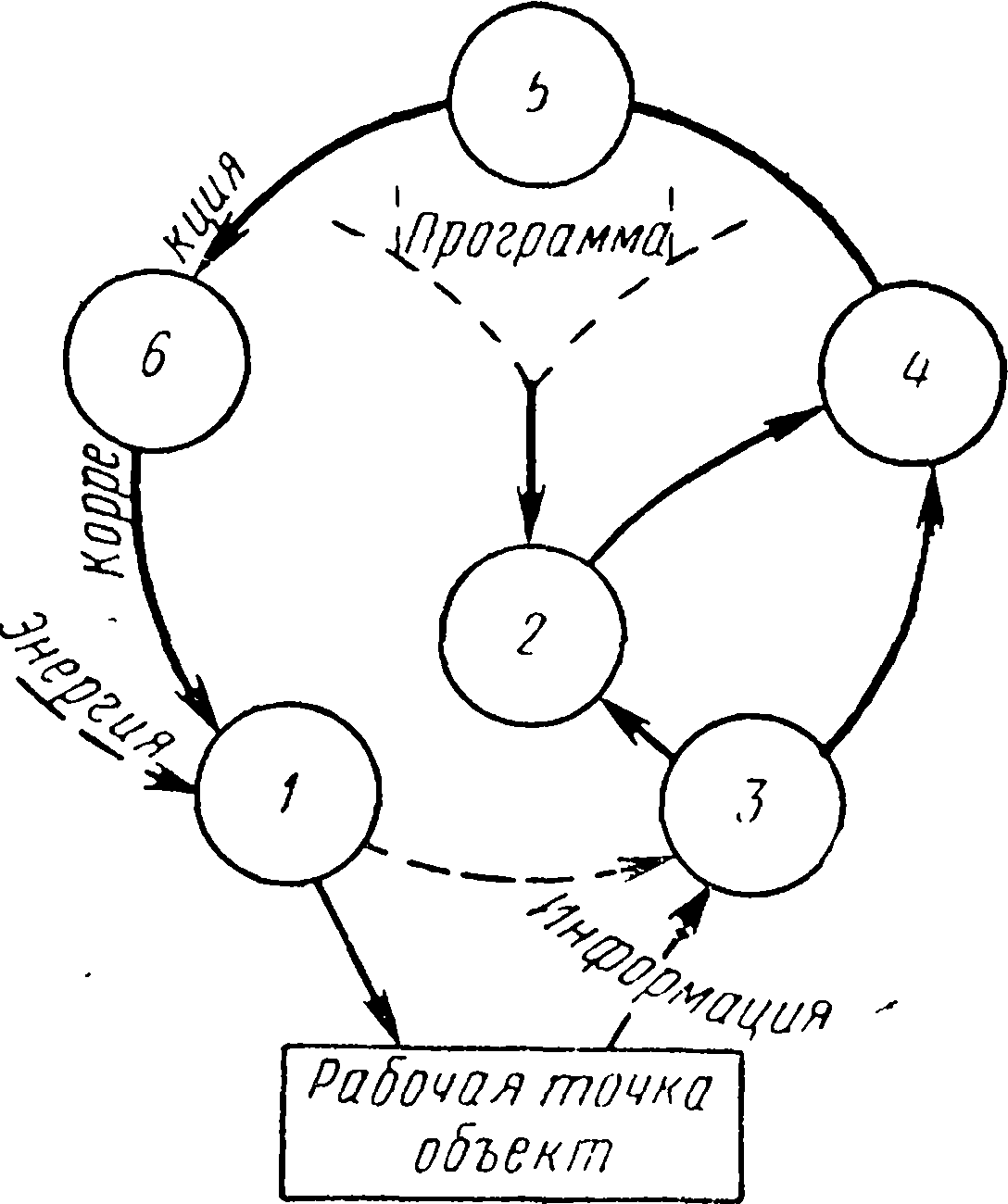
Простейшая блок-схема управления движениями (по Бернштейну).
Рис. 82 аппарата
В связи с проникновением идей и методов кибернетики в биологические и антропологические
науки многие исследователи (Н. А. Бернштеин [23], К. Дж. В. Крейк [372]) пытаются наметить общую схему контура регулирования движений и определить его основные элементы. На рис. 82 приведена блок-схема аппарата управления движениями, предложенная Н. А. Бернштейном [23]. Этот аппарат образует замкнутый контур регулирования, включающий шесть основных элементов:
/ — эффектор (двигательный аппарат), работа которого управляется по заданному параметру;
— задающий элемент, который вносит на основе заданной программы требуемое значение регулируемого параметра;
— рецептор, воспринимающий фактические текущие значения параметра и передающий сигналы о них;
— прибор сличения, выявляющий расхождение требуемого и фактического значений;
24*
371
5—прибор пере шифровки, переводящий данные приборы сличения в коррекционные импульсы, подаваемые регулятору;
6 — регулятор, управляющий эффектором.
Приведенная схема, конечно, не дает исчерпывающего объяснения механизму регуляции движений. С развитием конкретного исследования процессов циркуляции осведомительной и командной информации она, вероятно, будет уточняться и дополняться. Тем не менее в этой схеме достаточно четко очерчены основные звенья той системы, которая осуществляет регуляцию двигательных актов (рефлекторного кольца).
Исключительная роль в формировании сигналов обратной связи, а следовательно, и в регуляции движений принадлежит кинестетическим ощущениям, а также осязанию, отражающим состояние двигательного аппарата и его взаимодействие с объектом манипуляции в каждый данный момент. Как показывают исследования, если на начальных ступенях образования навыка движения протекают под контролем зрения, то впоследствии этот контроль все более переходит к чувствительным приборам, заложенным в самом двигательном аппарате. По данным Бушуровой [36, 35], в ходе формирования навыка кинестезия как бы «вбирает в себя опыт» других сенсорных модальностей.
В этом случае образуется внутренний контур регулирования, обеспечивающий значительное ускорение циркуляции управляющей информации. Так, по подсчетам К. Купфмюллера '[424], время прохождения сигнала по внутреннему контуру примерно 0,04 сек, что в несколько раз короче времени прохождения при зрительном контроле движений, т. е. во «внешнем» контуре регулирования (0,1—0,2 сск^. Поэтому в тех системах, где требуется высокая скорость действий оператора, органы управления необходимо конструировать с таким расчетом, чтобы обеспечить возможность переключения регулятивных функций со зрения (и вообще дистант-рецепции) на кинестезию и осязание. Подробнее об этом будет сказано позднее.
Образ совершаемого движения формируется на основе мышечных, суставных и тактильных ощущений. К сожалению, из-за ряда методических трудностей характеристики этих составляющих и их относительная роль
372
в структуре образа изучены еще недостаточно. Имеющиеся данные позволяют судить о возможностях и особенностях отражения движений пока лишь в общих чертах.
В связи с задачей конструирования органов управления определенный интерес представляют данные о возможностях различения направления, размаха, длительности и силы движений руки.
Систематическое изучение пространственно-двигательной ориентировки было начато в работах Г. X. Кекчеева [146], который показал, что наиболее точные сигналы (кинестетические ощущения) о направлении и размахе движения возникают в том случае, если оно совершается па расстоянии 15—35 см от средней точки тела (т. е. в оптимальной рабочей зоне). Для расстояний больше чем 40—50 см точность анализа снижается.
Позднее вопросом пространственно-двигательной ориентировки в связи с инженерно-психологическими задачами занимался П. Фиттс [406]. В экспериментах испытуемому (с выключенным зрением) предлагалось последовательно попадать пальцем в центры мишеней, расположенных вокруг него. Точность движений оценивалась по числу попаданий. Данные Фиттса приведены на рис. 83. По Фиттсу, наибольшая точность движений, не контролируемых зрительно, характерна для сагиттальной плоскости (угол равен 0°). С увеличением угла она постепенно снижается. Точность попаданий правой руки (в мишени справа) несколько больше, чем левой (в мишени слева). Пространственно-двигательная ориентировка точнее для уровня ниже груди. Исходя из этих данных, с учетом ранга ошибок предлагается отделять органы управления один от другого на расстояние не менее чем 15—20 см в средней зоне моторного поля оператора и 30—40 см — в крайних. Только при таких условиях можно рассчитывать на высокую точность прицельных движений руки без визуального контроля.
Исследования проприоцептивной оценки амплитуды движений руки показали, что короткие движения, как правило, переоцениваются, длинные — недооцениваются. По разным данным «нейтральная точка» (разделяющая короткие и длинные движения) соответствует •амплитуде от 8 до 15 см. Из этого общего правила
373

Рис. 83. Точность пространственно-двигательной ориентировки
(по П. Фиттсу):
а — условия эксперимента; б— результаты экспериментов; в — верхний ряд
мишеней; с — средний ряд мишеней; н — нижний ряд мишеней. Положение белых кругов отображает положение мишеней в зоне движений рук (от —135° до +135° относительно сагиттальной плоскости). Средний ряд кругов соответствует среднему положению мишеней (на уровне груди). Величина кругов обозначает относительное число ошибок: чем больше круг, тем меньшая точность ориентировки соответствует данному направлению. Цифры под кругами указывают среднюю величину ошибок (в дюймах). Относительная величина черных кругов, расположенных внутри белых, пропорциональна ошибкам, которые допускались при попадании в разные квадранты мишеней.
выпадают только движения, направленные сверху вниз, которые всегда переоцениваются. С увеличением амплитуды возрастает и абсолютная ошибка. Наиболее точно оцениваются движения правой руки, 'совершаемые в направлении из центра направо.
Точность оценки амплитуды зависит от характера взаимодействия элементов кинематической цепи. Наш сотрудник С. Н. Сафарян сравнил два способа воспроизведения движений заданной амплитуды: 1) произвольный (как удобней для испытуемого) и 2) при фиксированном положении всех звеньев руки, перемешающейся относительно плечевого сустава. Воспроизведение вторым способом оказалось точнее, что обусловлено большей простотой кинематической цепи в этом случае, а также, по-видимому, высоким уровнем чувствительности плечевого сустава.
Точность чувствительного анализа длительности заметно уступает точности анализа пространственных признаков движений. Однако соответствующая тренировка приводит к повышению точности. Так, например, точность различения длительности графических движений, по нашим данным [194, 195], достигает 0,1—0,2 сек. Аналогичные результаты получила Бушуро'ва [136], изучавшая рабочие движения в операциях опиливания металла.
В исследованиях Кекчеева было установлено, что различения пространственных и временных параметров движения взаимосвязаны. Так, медленно совершаемые движения дают наибольшее число ошибок в различении не только длительности (переоценка), но также амплитуды и направления. Вместе с тем изменение амплитуды влияет на точность различения длительности и скорости.
Можно предполагать, что существует некоторое оптимальное соотношение основных параметров движений, при котором они различаются наиболее точно.
Дифференциальный порог мышечных напряжений (силовой параметр), по данным разных авторов, равен 2,5% (Вебер), 9% (Сишор) относительно исходной величины. Несовпадение данных объясняется различием в условиях и задачах экспериментов. При соответствующей тренировке порог может быть уменьшен до 1 % (Докукин).
375
По мнению Бейтса [по 141], проприоцептивные сигналы о величине усилия являются основной входной величиной в системе регулирования движений. Скорость рассматривается как простой интеграл от силы, а смещение как двойной. В связи с этим различают первичную и вторичную афферентацию. Согласно этому мнению, регуляция движений по силе является более простой задачей, чем по скорости и величине. Данная точка зрения, по-видимому, справедлива, если рассматривать мышечную чувствительность вне связи с суставной.
Важнейшей чертой двигательного развития человека является функциональное разделение левой и правой рук. По моторным функциям в 90%' случаев правая рука оказывается ведущей. Но по функциям сенсорным взаимоотношение рук более сложно. Если по показателям пространственно-двигательной ориентировки 6ojjee развита кинестезия правой руки, то по уровню различения статических напряжений, по тактильной чувствительности и скорости осязания — левая (подробнее см. в книге Ананьева и др. [8]).
Итак, человеческая рука представляет собой сложную управляемую систему с обратными связями. Точность и скорость ее движений определяются не самими по себе свойствами мышечной ткани и строением суставов, а главным образом характеристиками процесса циркуляции управляющей информации (временем цикла регуляции, временем переключений, структурой управляющих сигналов и т. д.) {. Благодаря организации регуляционных взаимодействий на основе- сигналов обратной связи (прежде всего проприоцептивных) преодолеваются избыточные степени свободы движущегося органа, кинематические цепи становятся полносвязанными, а тем самым движения превращаются в координированные.
Вместе с тем в трудовых операциях рука выступает как компонент системы «орган-Ьорудие», которая в конечном счете определяет структуру двигательного акта.
1 Из этого, конечно, не следует, что анатомия руки не играет роли в построении движений. Совершенно ясно, что строение моторного аппарата и его механические свойства оказывают существенное влияние на характеристики процесса регуляции.
376
Любое, даже сравнительно простое, трудовое действие складывается из более или менее значительной массы элементарных движений, объединяемых механизмом регуляции в целостную структуру. Разные движения, включенные в такую структуру, несут различные функции, по которым .их можно разбить на три группы.
Первую группу составляют собственно рабочие (или исполнительские) движения, посредством которых осуществляется воздействие на объект. В структуре трудового действия эти движения занимают центральное место. Их конкретные характеристики определяются особенностями той операции, которая выполняется системой «рука+орудие».
К другой группе относятся гностические движения. Как следует из названия, они направлены на познание объекта и условий действия. Эти движения весьма многообразны.
Прежде 'всего нужно указать на ощупывающие, или осязательные, движения, с шомощыо которых субъект получает информацию о механических свойствах и пространственных особенностях тех предметов, которыми он манипулирует.
Разновидностью движений, близкой к осязательным, являются измерительные движения, играющие важную роль в формировании образа расстояния, которое должна пройти рука (Ю. П. Лапе [171]).
К гностическим движениям относятся также пробующие и контрольные. По своим характеристикам пробующие движения сходны с собственно рабочими. Однако их действительной функцией является ориентировка в возможных способах действия, из которых выбирается оптимальный для данных условий. Посредством контрольных движений осуществляется текущая проверка отдельных этапов и всего хода действия.
Третью группу составляют приспособительные движения. К ним относятся установочные движения (установка рабочей позы руки), а также корригирующие i(c их помощью исправляются ошибки, возникающие в процессе выполнения действия), уравновешивающие и компенсаторные (они обеспечивают устойчивость и пластичность работающей руки) 1.
1 Более "подробное описание движений различных типов дается в наших работах [7, 48, 434].
377
Между перечисленными типами движений нет резких границ. В реальных трудовых действиях можно наблюдать их взаимные переходы.
Взаимоотношение между этими движениями изменяется в процессе формирования навыков. На первой ступени обычно преобладают гностические движения!. Позднее они редуцируются и настолько тесно сливаются с рабочими движениями, что их часто трудно бывает расчленить. Однако, как показала В. В. Суворова ,[298], гностические (особенно пробующие) движения вновь появляются при перестройке навыков. Изменение взаимоотношений между движениями разных типов в процессе формирования навыка связано с изменением уровня их регуляции (об уровнях регуляции см. гл. 4).
Перечисленные типы движений были выявлены при изучении операций ручного труда. Интересно отметить, что в некоторых видах операций правая рука выполняет преимущественно рабочие движения, а левая — гностические и приспособительные.
Позднее они были обнаружены также в действиях по управлению машинами. Это было установлено в экспериментах Н. А. Розе [273], изучавшей манипуляции с различными органами управления (маховики, тумблеры, выключатели, рукоятки, рычаги и т. д.) 2. Анализ показал, что в этих случаях разные пальцы выполняют разные функции. Обычно большой, указательный и иногда средний производят рабочие движения. Средний и безымянный часто выполняют гностические движения, а безымянный — приспособительные. Однако каждый тип движения не связан однозначно с определенным пальцем. В процессе манипулирования происходит смена функций пальцев и «передача» движений от одного к другому.
Целостное движение кисти представляет* собой' комбинацию парциальных движений каждого пальца, раз-
1 Исследователи обычно отмечают, что в 'начале формирования навыка наблюдается много «лишних» движений. Эти движения ка жутся лишними только по отношению к конечному результату. В действительности же они необходимы, так как обеспечивают ориентировку субъекта в условиях труда. Многие из «лишних» дви жений являются по существу гностическими.
2 Исследование Розе проводилось на кафедре психологии ЛГУ под руководством проф. Ананьева и автора.
378
деленных микропаузами. При этом, чем сложнее двигательная задача, тем более дробными становятся движения. По-видимому, увеличение дробности 'является условием образования сложных двигательных структур.
Можно предполагать, что каждое парциальное движение дает элементарный кинестетический сигнал. С увеличением дробности движений и соответственно массы элементарных кинестетических сигналов возрастают возможности их последующего синтеза в целостную структуру. В этом проявляется единство механизмов анализа и синтеза в построении двигательного акта.
Структура двигательных компонентов и определяемые ею скорость и точность управляющего действия зависят от тех задач, которые решает оператор.
По назначению органов управления двигательные задачи ориентировочно можно разделить на четыре класса.
А. Одни органы управления предназначены для операций включения, выключения и переключения. Манипулирование с ними строится по принципу простых или дизъюнктивных двигательных реакций (иногда Р ДО).
В гл. 1 приведены данные о латентном периоде этих реакций, однако ничего не сказано о моторных компонентах. На первый взгляд может показаться, что моторный компонент здесь предельно прост (нажим кнопки, перемещение рычага или поворот рукоятки). Однако детальный анализ показывает, что даже в этом случае двигательный акт складывается из довольно значительной массы микродвижений пальцев. По данным Розе, латентный период подобного рода реакций зависит не только от тех факторов, которые описаны в гл. 1, но и от временных характеристик установочных движений. Она показала, что, чем раньше рука принимает необходимую позу, тем короче латентный период. Самый процесс манипулирования состоит из ряда микродвижений каждого пальца, совершаемых как в -контакте, так и вне контакта с органом управления. Так, по подсчетам Розе, при нажиме на кнопку за 0,75 сек пальцы правой руки совершают более 60 микродвижений, при переключении тумблера за то же время— около 80, «клювика» — более 60. Значительная доля принадлежит осязательным микродвижениям,
379
с помощью которых отражаются свойства органа управления (фррма, сопротивление), что важно для организации хватки и регулирования усилий, а также компенсирующим и уравновешивающим, которые обеспечивают координированность двигательного акта.
Б. Второй класс двигательных задач состоит в выполнении последовательного ряда повторяющихся движений, с помощью которых осуществляются операции кодирования и передачи информации (печатание перфокарт, машинопись, передача телеграмм), а также точной нацеленной установки. Эти движения могут быть вращательными, нажимными или ударными.
Одной из важных характеристик повторяющихся движений является их тем<п. Исследования вращательных движений (манипулирование с ручками и маховиками) установили, что максимальный темп вращения для ведущей руки равен 4,83 об/сек, для неведущей — 4 об/сек [363, 441]. Выявилась также его зависимость от радиуса вращаемых рукояток и величины их сопротивления, а значит, и необходимого усилия. При минимальном сопротивлении наибольший темп приходится на рукоятки радиусом 3 см. С увеличением радиуса до 24 см максимальный темп сокращается почти вдвое; уменьшение радиуса также дает сокращение темпа, хотя и менее заметное. Если сопротивление рукоятки возрастает, то максимальный темп сокращается, при этом особенно сильно для движений с малым радиусом (менее 3 см) и почти незаметно для движений с большим радиусом (от 7 до 24 см). При увеличении сопротивления (трения) до 5 000 г максимальный темп достигается лри вращении рукоятки радиусом 4 см.
Максимальный темп нажимных движений при величине усилия 25 г для ведущей руки составляет 6,68 нажимов/сек, для неведущей — 5,3 нажимов/сек. При увеличении усилия до 400 г эти различия уменьшаются (6,14 — для ведущей; 5,59 — для неведущей).
Важным моментом нажимных движений является регулирование усилий. Его точность в значительной мере зависит от кинестической сигнализации. По данным К. А. Провинса '[466], при анестезии двигательного нерва точность воспроизведения усилий уменьшается (особенно при силе 200 г и меньше). Она зависит также и от тактильной сигнализации, изменяясь с изменением
380
площади кожной поверхности, контактирующей с предметом.
Исследования нашего сотрудника Г. В. Суходоль-ского обнаружили влияние темпа движений на регуляцию силы нажимов. При сравнении темпов 1, 2, 3 и 5 нажимов/сек оптимальным оказался последний. При темпе 5 нажимов/сек точнее. решаются задачи как сохранения заданного усилия, так и его постепенного изменения (увеличения или уменьшения).
Максимальный тем<п ударных движений пальцами варьирует от 5 до 14 ударов в 1 сек. В среднем он равен 8,5 ударов в 1 сек1. При этом наблюдаются различия между пальцами (табл. 22).
Т Л Б Л И Ц А 22