

 еловек
еловек
u
моеква • i 9 6 6
Б. СР. А О Л* О В
техника
ОМ Е РКИ ИНЖЕНЕРНОЙ ПСИХОЛОГИИ
ИЗДАТЕЛЬСТВО „СОВЕТСКОЕ РАДИО
УДК 62-50.23
Книга является одной из первых в СССР работ, освещающих проблемы новой научной отрасли — инженерной психологии. Она содержит подробное описание психофизиологических характеристик человека, определяющих его взаимодействие с машиной. Приводятся обширные данные, характеризующие быстроту реакции оператора на звуковые, световые и другие воздействия, способности человека принимать, перерабатывать и хранить информацию, надежность оператора. Дается характеристика психических процессов и структуры трудовых действий. В работе обсуждаются принципы конструирования индикационных устройств и органов управления, вытекающие из особенностей психической деятельности человека, т. е. рассматривается проблема согласования конструктивных особенностей машин с характеристиками человека, управляющего ими. Обобщаются итоги как отечественных, так и зарубежных исследований в области инженерной психологии.
Книга предназначается для специалистов, работающих в области автоматики и радиолокации, психологов, а также студентов университетов и технических вузов.
3-3-14 24-66
БОРИС ФЕДОРОВИЧ ЛОМОВ
Человек и техника
Редактор Н. Я- Гутчина Технический редактор В. В. Беляева
Художественный редактор В. Т. Сидоренко
Обложка и титул художника Б. Шаповалова
Сдано в набор 14/Ш I960 г. Подписано к печати H/VII 1966 г.
Т-09203 Формат 84ХЮ8'/За Обьем 121.3С> п. л. Уч.-лзд. л. 25,881
Заказ 2286 Тираж 20 300 экз. Пумага типографская № 3
Цена в переппеге М"» П 1р. 73 к.
Московская типография № 10 Глаиполпграфпрома
Комитета по печати при Совете Miunicipoii СССР.
Шлюзовая и а б.) V),
СОДЕРЖАНИЕ
Предисловие автора ко второму изданию 8
Предисловие редактора к первому изданию 11
Введение 15
Глаза 1
Человек как звено системы управ ления 27
Глава 2
Анализаторы человека (чувствующие приборы) . . ._ 107
Глаза 3
О способности человека принимать, передавать и хранить информацию 168
Глава 4
Психические процессы и передача ин формации человеку 222
Глава 5
Психологическое исследование средств сигнализации 263
Глава б
Моторные компоненты действия и
конструирование органов управления 362
Заключение 404
Литература 418
Предметный указатель . . . 445
Именной указатель. . . . . 459
МОИМ РОДИТЕЛЯМ
ФЕДОРУ АЛЕКСЕЕВИЧУ И
МАРИИ СТЕПАНОВНЕ ЛОМОВЫМ
ПОСВЯЩАЮ
ПРЕДИСЛОВИЕ АВТОРА КО ВТОРОМУ ИЗДАНИЮ
Данная книга была написана в те годы (1959—1961), когда инженерная психология в нашей стране только начинала развиваться как самостоятельное научное направление. В то время было важно определить круг ее проблем, дать общий обзор ведущихся исследований и более или менее систематически представить основные результаты этих исследований. Именно такую задачу и ставил перед собой автор книги.
За прошедшие пять лет инженерная психология достигла значительных успехов. Возник ряд новых лабораторий. Расширилась область исследований. Многие вопросы, которые в книге «Человек и техника» были намечены лишь схематически, сейчас разрабатываются весьма интенсивно. Наши знания о деятельности человека в системах контроля и управления обогатились. Инженерная психология накопила также некоторый опыт решения практических задач. Упрочился ее союз со смежными науками.
За последние годы проведен ряд конференций, посвященных проблемам инженерной психологии. Впервые эти проблемы обсуждались на конференции по психологии труда, созванной Институтом психологии АПН РСФСР в 1957 г. Несколько докладов было прочитано на Первом Всесоюзном съезде психологов (Москва, 1959 г.).
На втором съезде, состоявшемся в 1963 г. в Ленинграде, уже работали самостоятельная секция инженерной психологии и симпозиум по проблемам приема и переработки информации человеком.
В 1963 г. в Москве состоялась конференция по проблеме «Человек и автомат», созванная Научным советом по кибернетике, Институтом автоматики и телемеханики АН СССР и Институтом психологии АПН РСФСР.
8
В 1964 г. была проведена Первая Ленинградская конференция по инженерной психологии, превратившаяся, по существу, во всесоюзную. На ней было обсуждено 120 докладов по всем направлениям ведущихся исследований.
В 1965 г. в Ленинграде проходила конференция по инженерной психологии в приборостроении.
Вопросы инженерной психологии нередко возникают и на совещаниях, посвященных другим проблемам. Можно, например, упомянуть конференцию «Научные и технические проблемы качества телевизионного изображения» (Ленинград, 1963 г.), конференции по авиационной и космической медицине (Москва, 1963 г.), по физиологии труда (Ленинград, 1964 г.), по бионике (Баку, 1964 г.), по вопросам безопасности автомобильного движения (Москва, 1965 г.), по вопросам художественного конструирования (Москва, 1964 г.; Ленинград, 1965 г.), по научной организации труда (Москва, 1965 г.) и др. За прошедшие годы появился также ряд новых публикаций по инженерной психологии, наиболее крупные из которых следует упомянуть.
В 1964 г. вышел сборник переводов статей американских и английских авторов «Инженерная психология» под редакцией В. П. Зинченко и Д. Ю. Панова (изд-во «Прогресс»), Крупным событием явился выход в свет сборника советских авторов «Инженерная психология» под редакцией В. П. Зинченко, Л. Н. Леонтьева и Д. Ю. Панова (МГУ, 1964), представляющего собой коллективный труд психологов, психофизиологов и инженеров.
В 1964 — 1966 г. ленинградским отделением Общества психологов совместно с другими организациями опубликованы четыре выпуска «Проблем инженерной психологии».
Все это свидетельствует о расширении работ в области инженерной психологии. Сейчас накоплена такая масса экспериментальных данных по разным проблемам этой молодой науки, что задача их систематизации и обобщения в виде единого руководства становится весьма сложной и, пожалуй, непосильной для одного человека.
Вместе с тем, существует потребность в книге, которая могла бы представить проблемы инженерной психо-
9
логии как целостного научного направления. И эта потребность становится, по-видимому, тем острее, чем более широко развертываются исследования по инженерной психологии, связанные с решением специальных задач (например, научной организации труда, технической эстетики, бионики, системотехники и т. д.).
Автор надеется, что предлагаемая вниманию читателей книга «Человек и техника (очерки инженерной психологии)» в какой-то мере может удовлетворить существующую потребность.
Подготавливая второе издание Книги «Человек и техника» (первое выпущено в 1963 г. ЛГУ), автор не имел возможности переработать ее с учетом всего нового, что появилось в инженерной психологии за прошедшие годы.
Во втором издании сохранена общая логика изложения проблем и данных инженерной 'психологии, а также структура книги. В пес включены лишь пекоюрые новые данные и дополнен список литературы.
Л (пор
ПРЕДИСЛОВИЕ РЕДАКТОРА К ПЕРВОМУ ИЗДАНИЮ
Предлагаемая вниманию читателей книга Б. Ф. Ломова— одна из первых советских монографий но инженерной психологии. Эта новая область психологии, пограничная с техническими и физико-математическими пауками, возникла в современных условиях технического прогресса и комплексного объединения различных наук для решения фундаментальных проблем производства. В последние годы рост инженерно-психологических исследований был особенно стремительным. Именно поэтому, несмотря па весьма короткий срок существования, в отечественной и зарубежной инженерной психологии накопилась большая масса экспериментальных данных, необходимых для конструирования и расчета индикационных устройств, органов управления и других механизмов дистанционного управления машинами.
Монография Б. Ф. Ломова представляет собой систематический свод этих данных, своеобразный итог начального развития инженерной психологии, который тем более интересен, что написан одним из крупных руководителей инженерно-психологических исследований в нашей стране.
В общем своде инженерно-психологических исследований, конечно, существенное место занимают оригинальные экспериментальные работы лаборатории инженерной психологии Ленинградского университета, организованной и возглавляемой автором данной монографии.
Книга Б. Ф. Ломова, как мне представляется, успешно сочетает в себе черты научной монографии и руководства для изучения основ и современного состояния инженерной психологии. Следует учесть, что в предшествующие годы автор монографии разработал оригинальные спецкурсы психологии труда и избранных про*
11
блем инженерной психологии, прочитанные им для студентов и аспирантов психологической специальности в Ленинградском университете. Наиболее важные части этих спецкурсов были многократно использованы автором книги в его лекциях для инженеров и научно-технических работников. Но, конечно, решающее значение для создания этой книги имело накопление Б. Ф. Ломовым и его сотрудниками известного опыта прямого использования инженерно-психологических данных на практике.
Это использование в целях конструирования новой, более совершенной техники будущего связывает психологию, а с ней весь комплекс антропологических наук с самыми перспективными проблемами технического развития. В книге Б. Ф. Ломова ясно намечается программа дальнейшего развития инженерной психологии, связанного с потребностями автоматизации производства, всесторонним использованием возможностей технического моделирования различных видов нервно-психической деятельности человека (особенно перцептивной, мнеми-ческой и логической) и наиболее рациональным .включением человека в систему управления машинами и механизмами.
Из книги Б. Ф. Ломова читатель легко усмотрит, что инженерная психология не только прикладная дисциплина с большим будущим. Развитие инженерной психологии во многом зависит от разработки ее теоретических основ и центральной теоретической проблемы — взаимодействия человека и техники в условиях автоматизации производства, имеющей столь важное значение для создания материально-технической базы коммунистического общества.
Эта проблема составляет главное теоретическое содержание монографии Б. Ф. Ломова. Различны аспекты, в которых она рассматривается. Один из них заключается в изучении человека как звена системы управления машинами и механизмами. Такой подход открывает доступ к сравнительной оценке возможностей человека и всех других звеньев системы управления, используя при этом современные методы теории информации и кибернетики в целом. Такой аспект особенно важен для инженерного применения научных знаний о человеке и развития инженерной психологии как,ласти кибернетики.
12
Однако этот аспект не только не исчерпывает теорий советской инженерной психологии, но и не определяет ее исходных принципиальных теоретических позиций, составляющих другой аспект этой книги — рассмотрение человека как субъекта труда и познания.
Материалистическое понимание процессов сознательной, психической регуляции трудовых действий разрабатывалось автором книги ка протяжении ряда лет. Этот аспект инженерной психологии подготовлен многими оригинальными исследованиями Б. Ф. Ломова в общей психологии, психофизиологии труда, а также педагогической психологии.
В данной монографии лишь частично использованы оригинальные данные прошлых исследований автора, хотя именно эти исследования привели автора в инженерную психологию.
Предшествующие исследования Б. Ф. Ломова могут быть объединены в три цикла, каждый из которых послужил своеобразным источником данной монографии.
Первый цикл экспериментальных работ был посвящен изучению особенностей бимануального осязания человека. Итоги этих работ были обобщены Б. Ф. Ломовым в коллективном труде «Осязание в процессах познания и труда» (совместно с Б. Г. Ананьевым, Л. М. Век-кером и А. В. Ярмоленко).
С этим циклом исследований связана новая проблема — психофизиологические основы конструирования органов управления в технических устройствах, — составляющая, как известно, одну из основных проблем инженерной психологии.
Второй цикл экспериментальных исследований Б. Ф. Ломова включал ряд работ, посвященных механизмам и закономерностям формирования графических навыков, а именно восприятия рисунка и его роли в регуляции навыков изобразительной деятельности, особенностям построения рисунка и чертежа, механизмам чтения чертежа и т. д. Общие итоги этих работ были подведены автором в книге «Формирование графических знаний и навыков у учащихся» (1959 г.), а также в ряде научных статей, обсуждавших специальные вопросы теории психической регуляции действий человека, первоначально графических, а затем и конструктивно-технических. Несомненно, важное значение имело обнаружение
13
регулйторйой роли графического образа в трудовом и конструктивно-техническом действии.
Третий цикл экспериментальных исследований Б. Ф. Ломова связан с изучением механизмов восприятия пространства и пространственных представлений как источника пространственного воображения, являющегося одним из важнейших компонентов конструктивно-технических способов. В этом плане были осуществлены сравнительные оценки измерительных функций разных анализаторов, исследования механизмов построения образа, сопоставления процессов изображений в анализаторных системах человека и технических устройствах, исследования генезиса и факторов развития пространственного воображения и т. д.
Многочисленные экспериментальные работы Б. Ф. Ломова вошли в данную монографию лишь частично. Однако они, бесспорно, составляют один из важнейших источников нового направления в инженерной психологии, представленного автором и его сотрудниками. Есть основание полагать, что ценный труд Б. Ф. Ломова сыграет существенную роль в дальнейшем развитии этой научной дисциплины, объединяющей науки о человеке и технические науки. Это объединение необходимо как непосредственно для технического прогресса, так и в интересах всестороннего развития человека.
В своей книге «Человек и техника» Б. Ф. Ломов формулирует некоторые проблемы и задали перспективного значения, связанные с комплексным изучением человека, его труда, познания и общения, составляющие предмет коллективных исследований ряда кафедр и лабораторий Ленинградского университета. Имеппо поэтому мы особенно заинтересованы в откликах читателей на представляемый труд.
Кафедра психологии и лаборатория инженерной психологии Ленинградского университета будут весьма признательны читателям за критические замечания, отзывы и пожелания.
Зав. кафедрой психологии ЛГУ проф. Б. Г. АНАНЬЕВ
ВВЕДЕНИЕ
Развитие производительных сил на базе передовой пауки и техники является важнейшей задачей строительства коммунизма.
Механизация и автоматизация производственных процессов, электрификация промышленности, сельского хозяйства и транспорта, использование атомной энергии, создание быстродействующих электронных счетных машин, применение новых методов химической переработки вещества — все это значительно расширяет возможности производства, изменяя условия, средства и методы труда, повышая его производительность.
В связи с успехами техники иногда говорят о замене человеческого труда «трудом» машин. Однако это утверждение не более чем метафора. В строгом смысле слова ни одна машина, даже самая совершенная, не трудится и не может трудиться. Она является лишь орудием труда, с помощью которого человек воздействует на природу, изменяя последнюю сообразно заранее поставленной цели.
Каких бы замечательных успехов ли достигала техника, какие бы удивительные автоматы ни создавались, труд всегда был и остается сознательной деятельностью человека, а человек — субъектом труда.
Возможности человека как главного элемента производительных сил расширяются за счет развития орудий труда. Но создание новых орудий приводит к изменению роли и места человека в производственных процессах. Отдельные операции, которые он должен был выполнять раньше, постепенно передаются машинам. Главными функциями человека в производстве становятся программирование, управление и контроль. На этой основе возникают новые формы взаимосвязи физического и умственного труда.
15
Для дальнейшего развития производительных сил важно знать, как изменяются требования к субъекту труда, обусловленные ходом технического прогресса, важно изучить особенности и возможности человека с точки зрения этих требований.
Можно отметить по крайней мере три главные тенденции изменения условий трудовой деятельности человека.
Во-первых, в связи с развитием механизации и автоматизации перед человеком ставится задача одновременного управления все большим и большим количеством объектов (и их параметров). Это, естественно, усложняет анализ и оценку их состояний, а следовательно, операции программирования, управления и контроля.
Во-вторых, человек все более отдаляется от управляемых объектов. В условиях дистанционного управления он уже не может воспринимать их состояния непосредственно. Между органами чувств человека и объектом управления «вклинивается» целая система технических устройств, передающих необходимую' информацию. При этом обычно информация, поступающая к человеку, оказывается закодированной, и -перед ним возникает новая задача — декодирование, которой не было при непосредственном восприятии хода управляемого процесса. Воздействие оператора на этот процесс также опосредствуется системой технических устройств, что изменяет требования к рабочим движениям.
Наконец, в условиях современной техники значительно возрастают требования к скорости действий работника, обусловленные повышением скоростей управляемых процессов.
Таким образом, развитие техники приводит к изменению условий трудовой деятельности, что в свою очередь изменяет требования к субъекту труда.
В связи с отмеченными тенденциями изменения условий труда возникает ряд специальных вопросов. Например, сколько сигналов может человек воспринять одновременно? Какова предельная скорость его реакций? Насколько быстро и точно и каким образом он выполняет операции декодирования? и т. д. Ответы на подобные вопросы предполагают изучение процессов восприятия, внимания, памяти, воображения, мышления, способ-
U
ностей и т. п., т. е. психических процессов и качеств человека,
Ясно, что эффективность трудовой деятельности человека зависит от того, насколько результаты этого изучения будут учтены при разработке и конструировании машин, которыми он должен управлять. Важно подчеркнуть необходимость знаний оптимальных условий деятельности человека, а также его предельных возможностей.
Сейчас человеку нередко приходится работать в условиях таких скоростей, которые превосходят возможности его воспринимающих аппаратов. Так, при полете со скоростью, в три раза превышающей скорость звука, у пилота возникает своеобразная иллюзия. Она выражается в том, что пилот видит те предметы, которые находятся на расстоянии 100 м позади самолета, как бы находящимися на уровне самолета (Штрухгольдт [по 75]). Эта иллюзия обусловлена анизохронией (несоразмерностью временных характеристик зрительного восприятия и движения «сверхскоростного» самолета), т. е. тем, что скорость восприятия «отстает» от скорости самолета. В этих условиях полеты при визуальной ориентировке становятся невозможными. Относительная медленность зрительного восприятия по сравнению со скоростью самолета является одной из основных причин столкновений в воздухе (Пердрие [458]). Понятно, что нельзя эффективно решить задачу конструирования системы управления «сверхскоростным» самолетом, не учитывая временных границ зрительного восприятия. Если же иметь в виду, что при полете на таких самолетах изменяются условия не только зрительного восприятия, но и других психических процессов, то необходимость учета данных психологии при конструировании самолетов станет несомненной.
Еще большая необходимость в знаниях психических процессов и особенностей их изменения под влиянием тех или иных условий испытывается при конструировании космических кораблей. Замечательные полеты советских космонавтов и их американских коллег показали, что присутствие человека на борту космического корабля позволяет решать много таких задач, которые недоступны современным автоматам. Вместе с тем, условия деятельности космонавта существенно отличаются от
2-2286 1'
условий, в которых человек находится па земле. Возникают вопросы о том, что может и чего не может сделать человек в космическом полете, какова его роль в управлении кораблем, какие задачи целесообразно ему поручить и т. д. Чтобы ответить на них, необходимо знать, как изменяются психические функции человека при перегрузках, невесомости, длительном пребывании в замкнутом пространстве. На основе этих знаний решаются многие вопросы — от организации рабочего места оператора до системы его подготовки к полету. В конечном счете от успешности психологических исследований деятельности космонавта и их учета при конструировании корабля зависит и успешность космического полета.
Знания психических процессов и свойств человека необходимы также при разработке и конструировании железнодорожного, автомобильного, подводного и надводного транспорта, электростанций, заводских цехов и т. д. Инженерная психология выступает в этой связи как составная часть научной организации труда. Следует отметить, что она является также одной из основ (наряду с теорией архитектурной композиции) так называемой технической эстетики.
Не менее острая потребность в знаниях закономерностей психических процессов возникает при решении задач автоматизации производства. «Если речь идет, например, об автоматическом управлении варкой стали,— отмечают акад. С. Л. Соболев и проф. Л. Л. Ляпунов,— то надо суметь воспроизвести ход мыслей опытных сталеваров, изучить их реакцию па тс или иные показатели процесса и, выразив это в виде алгоритма, заложить его в машину. Только используя детально все эти данные, можно выделить элементарные акты и логические условия, составляющие искомый алгоритм»* [290, стр. 130].
Современная автоматика создает такие технические устройства, которые моделируют некоторые стороны работы человеческого мозга. Многие трудности, возникающие при этом, определяются тем, что мы еще недостаточно знаем природу психических процессов, являющихся функцией мозга. За последние годы достигнуты большие успехи в моделировании логических операций. Но задача создания автоматов, моделирующих сенсорные процессы (ощущения, восприятия, представления), еще не решена. Между тем автоматизация многих пооцес-
18
Сов Нуждается в моделировании именно ощущения и восприятия. Так, создание «машин-стенографисток», работающих под диктовку, упирается в проблему речевого слуха. Известно, что человек прекрасно понимает речь, произносимую голосом любого тембра, с любой эмоциональной окраской, в любом темпе. Для машины это пока непосильная задача. Но она может быть решена на основе точного знания законов речевого слуха.
При создании хлопкоуборочных, чаеуборочных, фрук-тоуборочпых машин, при автоматизации некоторых ткацких операций возникает задача моделирования осязательного восприятия. Мы уже не говорим о том, что во многих отраслях производства есть потребность в автоматах, моделирующих зрительное восприятие.
Большой круг вопросов возникает в связи с задачей обучения современного рабочего. В некоторых отраслях труда уже сейчас применяются специальные машины, предназначенные для обучения и тренировки человека. Надо полагать, что с развитием техники роль обучающих машин будет возрастать. Но чтобы конструировать их, необходимо знать закономерности формирования знаний, умений и навыков, закономерности формирования и развития способностей человека. Именно эти знания должны составить научную основу теории тренажеров и обучающих машин.
С развитием техники все более острой становится потребность в детальном и всестороннем изучении особенностей человека. Отсюда вытекает необходимость совместной работы тех, кто конструирует машины, и тех, кто изучает человека. Самим ходом технического прогресса диктуется союз технических и антропологических паук К
. Проблема «человек и техника» — одна из основных проблем современной науки. Ее решение предполагает совместную работу инженеров, математиков, психологов, физиологов, анатомов и представителей многих других научных дисциплин, ибо по существу своему эта проблема требует комплексного исследования.
На стыках антропологических, биологических и технических паук в последнее время сформировался ряд
1 Термин «антропологический» употребляется здесь в самом широком смысле. К антропологическим относятся все те науки, предметом исследования которых является человек.
о* "°
Новых научных направлений, изучающих разные аспекте этой сложной проблемы. Одним из них является инженерная психология 1.
Перечислим основные проблемы инженерной психологии:
Анализ задач человека в системах управления и способов его связи с другими компонентами систем. Такой анализ предполагает сравнительное изучение возможностей человека и машины с тем, чтобы определить оптимальную структурную схему системы управления. В этой связи изучаются характеристики точности, скорости и надежности действий человека, а также решается вопрос о распределении функций между человеком и машиной.
Исследование групповой деятельности людей, обслуживающих систему управления, или взаимодействия операторов. Эта проблема становится особенно острой при разработке так называемых «больших систем», обслуживаемых коллективами людей. Создавая большие системы, необходимо решить, как будет осуществляться взаимный обмен информацией между членами коллектива, в какие группы их целесообразно объединить и какова должна быть численность каждой группы. В этой связи возникает также вопрос о «психофизиологической совместимости операторов».
На основе анализа групповой деятельности решаются задали оптимального пространственного расположения членов группы и организации их рабочих мест, а также сменности в работе.
3. Анализ структуры деятельности оператора. В этой связи определяется состав действий, которые должен вы полнять человек в системе управления, и рассматри ваются возможные способы их выполнения. В ходе та кого анализа выясняются требования -к психическим функциям, обусловленные структурой деятельности. Исходя из результатов анализа, оценивается сложность деятельности, а также решаются вопросы об отборе опе раторов (если это необходимо) и методах их тренировки.
* Это направление пока еще не имеет общепризнанного названия. Оно выступает под разными именами: «инженерная психология», «поихотехнология», «прикладная экспериментальная психология», «техническая психофизиология». «Инженерная психология» входит как составная (часть в «эргономику», «технику человеческих факторов», «человеческую инженерию» (human engineering).
20
I 4. Исследование факторов, влияющих на эффектив-ji ность и надежность действий оператора. В этой связи рассматриваются условия, в которых работает оператор (освещенность, шум, вибрация, температура и т. д.), определяется возможность возникновения экстремальных ситуаций, перегрузок и т. д.
Все эти проблемы относятся к системе «человек— машина» в целом. Их анализ, являющийся первым этапом инженерно-психологического исследования, позволяет дать общую оценку «человеческих факторов», влияющих на работу системы управления, и найти ее оптимальную (в каждом конкретном случае) структурную и функциональную схему.
Другие проблемы касаются более детального изучения «человеческого звена» системы управления, на основе которого решаются вопросы выбора средств отображения, конструкции информационных панелей, пультов управления и т. п., т. е. тех устройств, с помощью которых человек получает информацию и па которые он непосредственно воздействует.
5. Изучение процесса приема человеком осведомитель ной информации о состояниях управляемых объектов, иначе говоря, изучение «сенсорного входа» человека.
Перед инженерами, создающими новую технику, неизбежно возникают вопросы о том, какой объем информации человек способен принять за единицу времени, какова наилучшая форма подачи информации человеку в той или иной конкретной системе управления, какими порциями следует подавать ему информацию, чтобы обеспечить нормальный ход работы, какова оптимальная частота следования этих порций и т. д. В этой связи решается практическая задача «техники ввода информации».
Анализ процессов переработки информации человеком, ее хранения и формирования решения (командной информации). В этой связи особенно важными являются вопросы о способах переработки информации, применяемых человеком, о его возможностях кодировать, перекодировать и декодировать информацию, об объеме сохраняемой информации и способах хранения и т. п.
Исследование управляющих действий человека, иначе говоря, характеристик его «моторного выхода».
21
Здесь центральным является вопрос о структуре действий человека и механизме их регуляции.
Перечисленные проблемы предполагают прежде всего изучение закономерностей психических процессов, хотя, разумеется, для их решения необходимо привлекать данные не только психологии, но и других наук.
На основе инженерно-психологических исследований решается практическая задача согласования характеристик человека и машины, образующих единую систему управления.
Как техническая наука инженерная психология изучает орудия труда и технологические процессы, по лишь под определенным углом зрения: выясняя, какие требования предъявляются конструкцией инструментов, машин, приборов и особенностями производственных операций к психическим свойствам человека.
Как психологическая паука она изучает психические процессы и свойства человека, но также лишь под определенным углом зрения: выясняя, какие требования к орудиям труда и к технологии вытекают из характеристики этих процессов и свойств.
На основе инженерно-психологических исследований решаются задачи приспособления конструкции машин к характеристикам человека и тем самым обеспечиваются оптимальные условия труда.
Инициаторами в создании инженерной психологии как самостоятельного научного направления выступили Ф. Бартлетт, В. Р. Гарнер, С. Т. Морган, Р. А. Мак-Фер-ланд, Е. Дж. Мак-Кормик, Л. Чапапис, П. М. Фиттс и некоторые другие психологи1.
Работы американских и английских психологов первоначально были связаны с задачами конструирования военной техники, позднее психологическому анализу подверглись и другие ее виды. Правда, и до сих пор инженерная психология в США обслуживает прежде всего нужды вооруженных сил. Однако результаты исследования в этой области имеют общее значение для развития современной техники. Они представляют собой такие научные достижения, которые могут и должны
1 Отметим, что первые исследования инженерно-психологического типа были проведены ib «пашей стране еще 'в 20-е годы Н. А. .Бернштейном, iC. Г. Теллерштейном, Й. А. Эпле и Н. В. Зим-
КИНЫ1М.
22
быть использованы в самых различных областях производства. Отметим, что, используя данные англо-американской инженерной психологии, нужно иметь в виду слабость и противоречивость ее методологических, философских позиций.
В Советском Союзе инженерная психология сделала только первые шаги. Однако уже сейчас становится ясной необходимость теоретического осмысления накапливаемых результатов. Последовательно материалистические позиции психологии, опирающейся на ленинскую теорию отражения, являются основным условием успешного-развития инженерной психологии.
В течение ряда лет инженерно-психологические исследования выступали как один из разделов психологии и физиологии труда. Проблемы, которые сейчас составляют предмет самостоятельной науки, разрабатывались в связи с задачами организации условий труда и рационализации приемов трудовой деятельности человека.
Возможность поворота психологии к проблемам технического прогресса подготовлена развитием ее специальных областей: общей психологии, экспериментальной психологии, психологии' труда. Данные, представляющие определенный интерес для решения новых проблем, накоплены в детской, педагогической, авиационной и военной 'психологии, в психологии спорта и других областях 1.
Важно подчеркнуть ту исключительную роль, которую играют в развитии инженерной психологии исследования познавательных процессов (ощущений, различений, восприятий, опознаний, представлений, мышления). В современных условиях наблюдается сращивание 'процессов труда и познания. Человек развивается как
1 Известную роль в возникновении инженерной психологии сыграла также .психотехника. Несмотря па нечеткость, а иногда и порочность ее философских позиций, в психотехнике накоплен значительный .научный 'материал, подготовивший почву для инженерной (психологии. Подробный обзор источников инженерной психологии и ее основных проблем дастся .в работах А. Н. Леонтьева и Д. Ю. Панова [185], Д. Л. Ошанина [246], К. К- Платонова [258], М. И. Бобпевой [24], Л. Б. Ительсона [143], Н. Г. Леваидовского [177], Я. Кржмвоглавого [163], В. П. Зииченко и Д. Ю. Панова [130], Чапаниса [357—360], Мак-Кормика [441], Фиттса [406], 3. Гератс-воля [75] и др., а также в наших статьях [196, 203, 206, 209, 213, 436].
23
субъект труда, поскольку он развивается как субъект познания, и наоборот. Процессы труда все чаще строятся по законам познания. Это определяется логикой общественного развития, для которого характерно соединение физического и умственного труда. Единство познания и труда выступает в качестве одного из основных условий развития творческих возможностей человека.
Известно, что традиционная психология и физиология труда развивались в основном как учение о двигатель-пых актах, а проблема познания долгое время являлась объектом преимущественно общей и экспериментальной психологии. Проблемы инженерной психологии требуют новых форм синтеза этих научных дисциплин. В русле нового направления, казалось бы, наиболее абстрактная отрасль психологии находит практическое применение. Вместе с тем инженерно-психологические исследования приобретают сейчас принципиальное значение для дальнейшего развития общей теории психологии.
Предпосылки инженерной психологии формировались в ходе развития не только психологических (более широко, антропологических), по также и технических наук. В этой связи прежде всего нужно упомянуть технологию, телемеханику, теорию автоматического регулирования, радиотехнику, электронику, теорию надежности. Инженерная психология обязана им постановкой вопросов, формированием некоторых понятий и разработкой способов исследования.
Связь между психологией и техникой взаимная. С одной стороны, психологическая теория проверяется в процессе конструирования и эксплуатации новых машин. С другой — прогресс в изучении психических явлений открывает новые возможности для* решения технических задач.
Однако ни науки о человеке, ни технические науки не располагали такими методами и теорией, которые позволили бы изучать человека и машину как звенья единой системы с некоторой общей точки зрения. Совместная работа психологов и инженеров была затруднена отсутствием единой теоретической позиции.
Решающую роль в создании такой позиции сыграла кибернетика, возникшая как синтез многих научных достижений.
24
к Изучая процессы управления в машинах и живых ■Организмах, кибернетика сформулировала некоторые КЪбщие принципы управления и строения управляющих 1систем и разработала методы математического описания I процессов передачи, переработки и хранения информа-[ ции, играющих фундаментальную роль в управляющих » системах. Это позволило подойти к решению проблемы согласования характеристик машин с характеристиками человека с единой теоретической 'позиции, рассматривать качественно различные по своей природе звенья систем управления в одних и тех же терминах и пользоваться общими методами исследования этих звеньев.
Классическим объектом инженерной психологии является деятельность человека в системах контроля и управления (труд диспетчера, оператора у пульта управления и т. п.), точнее, взаимодействие человека и машины в этих системах. Однако область ее исследований более широка. Она охватывает все виды техники. Инженерно-психологические исследования необходимы всюду, где речь идет о создании тех ил-и иных устройств, рассчитанных на восприятие, представление, мышление человека, на его действия.
Вопросы инженерной психологии неизбежно возникают при разработке средств коммуникации, телевизионных систем, исследовательских приборов, при проектировании кинотеатров, заводских цехов, при оформлении автомобильных трасс и т. д. Достижения инженерной психологии могут и /должны быть использованы во всех областях народного хозяйства.
В книге дается обзор основных проблем инженерной психологии, а также накопленных -экспериментальных данных и намечаются некоторые пути дальнейших исследований. Основное внимание уделяется проблемам, перечисленным в пп. 5—7, так как именно они позволяют лучше всего раскрыть суть инженерно-психологического подхода к анализу деятельности человека в системах управления и являются наиболее разработанными. Остальные проблемы характеризуются лишь в общих чертах.
В гл. 1 рассматриваются самые общие характеристики человека как звена системы управления: скорость, точность и надежность его действий.
25
Гл. 2—5 посвящены проблемам приема и переработки информации человеком.
Мы выделяем три аспекта этой проблемы. Первый касается отношения физических свойств сигнала, несущего информацию, к характеристикам анализаторов человека {гл. 2). Это психофизический аспект, связанный с вопросом о выбчоре физического алфавита сигналов, т. е. вопрос о том, какие свойства стимулов, различаемых человеком, целесообразно в том или ином случае использовать в качестве сигналов, передающих информацию.
Второй аспект рассматриваемой проблемы касается оценки того количества информации, которое человек может принять, переработать в единицу времени и сохранить (гл. 3). Он связан с решением таких задач, как определение оптимальной длины алфавита сигналов: «насыщение» сигналов информацией; оценка числа их измерений (признаков), необходимых для передачи данного количества информации; распределение поступающих сигналов во времени и т. д.
Третий аспект относится к характеристике тех процессов, посредством которых принимается и перерабатывается информация, т. е. психических процессов (гл. 4). Это, так сказать, собственно психологический аспект. Речь идет прежде всего о формировании субъективного образа сигнала и декодировании поступающей информации.
В гл. 5 приводятся экспериментальные данные о восприятии человеком индикации различных типов, а также обсуждаются психологические принципы конструирования индикаторов.
Мы уделили главное внимание проблеме приема и переработки информации человеком '(соответственно вопросам техники ввода), имея в виду, что прием и переработка информации составляют основу деятельности человека в системах контроля и управления.
Гл. 6 посвящена проблеме моторных компонентов управляющих действий человека («моторный выход»). В этой связи обсуждается вопрос об инженерно-психологических принципах конструирования органов управления.
I
ЧЕЛОВЕК КАК ЗВЕНО СИСТЕМЫ УПРАВЛЕНИЯ
Функции человека-оператора в системах управления. Основным объектом исследования инженерной психологии является система «человек — машина», которая рассматривается как частный случай управляющих систем. В системе такого рода человек и машина образуют единый контур регулирования. Изучая процессы регулирования, протекающие в системах «человек—машина», их строение и функции, инженерная психология рассматривает человека-оператора как одно из звеньев этих систем.
Бесспорно, что работа машины и трудовая деятельность человека принципиально различны. Человек, преобразуя природу, осуществляет сознательно поставленную цель. Машина — лишь «слепой исполнитель» человеческой воли, орудие его труда. Бесспорно также, что процессы, протекающие в технических устройствах (как бы совершенны они ни были), качественно отличаются от психических процессов, свойственных человеку. И тем не менее современная наука находит много аналогий между человеком и мапгинрй. Более того, жизнь требует создания таких концепций, которые позволили бы рассматривать человека и машину с единой позиции. Но единая позиция, выработка понятий, применяемых и к машине и к человеку, вовсе еще не означает, что между ними стираются всякие качественные различия.
Правда, нужно отметить, что об этих различиях нередко забывают. В инженерной психологии имеются попытки полностью «уложить» психическую деятельность человека в схемы, разработанные науками, изучающими
27
машины. Те или иные особенности поведения человека пытаются объяснить принципами работы машин. При описании характеристик 'человека 'психологи часто заимствуют терминологию из радиотехники, электроники и т. и. Человек иногда рассматривается как «частотный фильтр» (Эллсон), как «линейный низкочастотный усилитель» |(Де-Вор) и т. п. В связи с успехами, достигнутыми в области конструирования информационно-логических машин, наблюдается и противоположная тенденция: описывать некоторые черты их работы в психологических терминах. Говорят, например, о «памяти» машин, об их «мышлении», о «решении машинами тех или иных задач» и т. д.
Такое взаимопроникновение терминов является, очевидно, неизбежной чертой процесса сближения антропологических и технических наук, важной для выработки общего языка и общих позиций. Но оно таит в себе некоторые опасности, так как cxorctbo описаний иногда затушевывает качественные различия между явлениягли. Как следствие этого и возникают попытки объяснять поведение человека, исходя из принципов работы машин. Здесь человек рассматривается как копия машины. В действительности же дело обстоит как <раз наоборот: в машинах моделируются те или иные стороны деятельности человека 1.
Как бы сложны ни были машины, они были и остаются лишь орудиями труда, как отмечал Маркс, «созданными человеческой рукой, органами человеческого мозга». Отношение «человек—машина» в любых условиях остается отношением «субъект труда — орудие труда».
Сравнивая деятельность человека и работу современных информационно-логических машин, можно найти некоторое сходство между ними. Вместе с тем необходимо подчеркнуть, что механизмы, осуществляющие прием и переработку сигналов человеком, припципиаль-
1 Создание машин, моделирующих какие-либо стороны деятельности человека, основывается на 'результатах исследования этих сторон. Вместе с тем оно (позволяет глубже познать моделируемые явления. В этом смысле сравнение человека с машиной может быть полезным для психологических исследований. Подход к изучению человека с позиций технических наук .позволяет 'наиболее отчетлдао выявить его специфические особенности.
28
но отличны от механизмов, которые действуют в процессе преобразования сигналов машиной.
Качественные различия между человеком и машиной, однако, не исключают возможности рассматривать их в строго определенном отношении как звенья единой системы управления. Именно в таком подходе и выражается точка зрения инженерной психологии. Она вовсе не требует отождествлять деятельность человека с работой машин или приписывать последним характеристики, свойственные только человеку.
Чтобы пояснить точку зрения инженерной психологии, обратимся к рассмотрению системы «человек — машина». Представим себе, что человек управляет каким-либо объектом. Будет ли это железнодорожный диспетчер или авиадиспетчер, летчик или машинист электростанции,— во всех случаях процесс управления имеет некоторые общие черты. Все изменения управляемого объекта улавливаются с помощью каких-либо датчиков, сигналы от датчиков преобразуются и подаются к приборам, за которыми наблюдает человек. Он воспринимает показания приборов, расшифровывает их, принимает решение, выполняет соответствующее действие, которое может быть и очень простым (например, нажим кнопки) и более сложным. Сигнал, возникающий в результате действия человека, преобразуется и поступает к управляемому объекту, изменяя его состояние. Новое состояние объекта вызывает изменение показаний приборов, которые информируют человека о результатах его действия. Это, в свою очередь, может потребовать от него новых действий и т. д.
Так ,в общих чертах выглядит замкнутая система регулирования, в которой человек, связанный прямыми и обратными связями с управляемым объектом, выступает в роли важнейшего, наиболее ответственного звена системы, а именно регулятора1. Конечно, человек может"" и не получать сведений о результатах своих действий.
1 Надо отметить, что в теории автоматического регулирования системы, 13 которых роль регул я тор л выполняется человеком, считаются разомкнутыми. Однако это может быть справедливым лишь в отношении систем автоматического регулирования. В более же общем случае замкнутой называется любая система с обратными связями вне зависимости от того, осуществляется ли замыкание через автоматический регулятор или через человека,
29
Тогда он рассматривается как звено разомкнутой системы.
На рис. 1 представлена элементарная структурная одноконтурная схема замкнутой системы -^человек— машина».
Процесс регулирования выступает как ряд переходов воздействий от одного звена системы к другому (лгь д-2,
Вход л ,
—hSH
*
Индикатор
Оператор
Хд Органы (/правления
8ыход
Машина
Рис. 1. Элементарная структурная схема пкчелш «человек машина».
Хз, Ха) . Причем состояние любого звена илпясг па все остальные и, в свою очередь, зависит от них.
В действительности нередко одному оператору приходится управлять рядом объектов или нескольким людям — одним объектом. Связи между человеком-регулятором и регулируемым объектом также могут быть более сложными и включать большое число опосредствующих звеньев (приборов-индикаторов, органов управления и т. д.). Наряду с основными контурами системы регулирования могут иметь и дополнительные. В этих случаях структурная схема системы «человек— машина» будет более сложной.
С развитием автоматики функции регулирования передаются автоматам. В приведенную схему включается система автоматического регулирования (САР) (рис. 2). Однако и в этом случае информация об управляемом объекте, а также о состояниях СДР поступает па индикаторы, за которыми наблюдает человек-оператор. Его основными задачами становятся контроль за работой
30
САР, предупреждение и профилактика аварий, выявление возникающих неисправностей и т. п. При нормальной работе САР оператор ограничивается только пассивным наблюдением за состояниями управляемых объектов. Но в те моменты, когда САР по каким-либо причинам не справляется с задачей, оператор вынужден активно вмешиваться в процесс регулирования.
Индикатор
Опрритир
Органы у продления
—Hg>
Система ад-
тпмотическ
pezijпиров
Машина
Выход
Рис. 2. Структурная схема системы управления,
включающей автоматический регулятор (но
Д. Л. Ошанину и И. Ф. Менде).
Схема автоматизированной системы управления (системы «человек—автомат») изображена па рис. 2.
Еще большими техническими возможностями обладают комплексно-автоматизированные системы, которые включают управляющие вычислительные машины (УВМ). Эти машины могут осуществлять автоматический пуск управляемых агрегатов ino оптимальной программе с учетом их состояний, поддерживать заданный режим работы, исходя из максимальной экономичности, предупреждать аварии, сигнализировать о нарушениях процесса с указанием места их возникновения и т. д., освобождая тем самым человека-оператора от многих функций. Основной задачей человека становится контроль за работой УВМ. При выходе их из строя оператор берет на себя и функции управления. В таких системах на приборную панель оператора передается информация об управляемом объекте и о работе УВМ.
31
Схема - комплексно-автоматизированной системы, включающей УВМ, шсжазана на рис. 3.
Приведенные три типа систем управления можно рассматривать как этапы их развития (Д. А. Ошанин, В. Ф. Венда [248]). Легко видеть, что при переходе от одного этапа развития к другому человек постепенно освобождается от ряда функций, которые передаются
Гп
Индикатор
Оператор
Органы (jfipaBiit: ■
HUH
^Н9>
Управляющая
Вычислитель
машина
Машина
Выход
Рис. 3. Структурная схема системы управления,
включающей управляющую вычислительную машину
(по Д. А Ошанину и В. Ф. Венде).
машинам. Но вместе с тем перед ним возникают новые и все более ответственные задачи. Человек становится интегральным звеном систем управления.
Основные параметры системы управления — время цикла регулирования (быстродействие), шропускная способность, точность и надежность — в значительной мере определяются возможностями и особенностями деятельности ее интегрального звена—человека. Без анализа его характеристик невозможно ни понять работу системы в целом, ни правильно рассчитать ее.
Жизнь показывает, что недоучет характеристик человека при конструировании систем управления ведет или к тому, что система оказывается не в состоянии работать, или к частым нарушениям ее работы, которые иногда кончаются авариями, или к преждевременному утомлению оператора (а это снижает надежность всей системы). Так, по данным американских авторов, значительное число аварий в авиации объясняется так назы-
32
ваемым «человеческим фактором» — обычно ошибками пилота. Они происходят потому, что пилот неточно воспринял показания приборов, принял один прибор за другой, спутал органы управления, не успел вовремя отреагировать и т. д.
Знание возможностей человека выполнять те или иные функции и способов их выполнения является необходимым условием рационального конструирования систем управления.
Определяющее значение в процессах управления имеют циркуляция и переработка информации. Роль каждого компонента управляющей системы определяется прежде всего тем, какие функции он выполняет в процессе циркуляции и переработки информации.
Функции человека в системах «человек—машина» могут быть различны. Он может выступать в роли приемника осведомительной информации, поступающей в той или иной форме от управляемого объекта, ее ретранслятора, передающего информацию от одного звена системы к другому. Он может осуществлять анализ информации и принимать решения, т. е. вырабатывать управляющую, или командную, информацию. Человек также может выполнять функцию программирования работы всей системы или ее частей. Он может осуществлять наблюдение и контроль за работой системы. Наконец, оператор может быть исполнителем той или иной команды, т. е. выполнять действия, непосредственно направленные на преобразования управляемого объекта. Обычно человек совмещает ряд функций, выполняя их последовательно или одновременно.
На разных этапах процесса управления одни функции могут быть доминирующими, а другие — подчиненными. Диапазон участия человека в системах управления чрезвычайно широк. На одном его полюсе находятся такие формы труда, в которых все функции по переработке информации выполняются человеком. Здесь контур регулирования системы «человек — орудие труда — предмет труда» почти полностью совпадает с контуром регулирования системы «человек». Это характерно для ручного труда. На другом полюсе находится труд в условиях высоко автоматизированного производства. Здесь большинство функций по переработке информации пере-
3—2286 33
дано машинам, за человеком же остается преимущественно программирование и контроль. Между этими полюсами имеется много переходных ступеней.
В ходе технического прогресса, особенно в связи с созданием кибернетических машин, отдельные функции человека в системах управления по приему, хранению, передаче и переработке информации стали постепенно передаваться машинам. Но создаваемые машины пока могут «решать» лишь частные задачи. Поэтому для того, чтобы обеспечить работу системы управления как целого, -в нее обязательно должно быть включено звено, осуществляющее интеграцию всех остальных звеньев. Этим интегральным звеном современных систем управления, в которых широко применяются кибернетические машины, и является человек, так как его психические свойства позволяют наилучшим способом решать задачи интеграции. Именно он организует процесс регулирования и тем самым координирует работу всех элементов системы, связывая их в единое целое. Кстати сказать, программирование и контроль работы автоматических систем представляют своего рода интегральные операции, поскольку они предполагают объединение функций приема, переработки и храпения информации.
При оценке роли человека в системах управления, обусловленной развитием техники, нужно учитывать два органически связанных момента. С одной стороны, успехи техники создают возможность передать ряд весьма сложных функций человека машине: идет процесс частичной замены человека «машинными звеньями» систем. В связи с этим расширяется круг задач, которые способна решать система. С другой стороны, чем большее число машин включается в процесс управления и чем более расширяется круг задач, тем большей становится ^необходимость интегрировать их работу. А это означает, что'относительная роль человека в системах управления возрастает.
В последнее время в литературе часто обсуждается вопрос о том, в каких отношениях человек превосходит* машину, а в каких уступает ей (речь идет о сравнительном анализе кибернетических машин и человека). Поскольку при конструировании систем управления неизбежно приходится решать задачу распределения функ-
34
ций между всеми ее звеньями, для инженерной психологии этот вопрос представляет большой интерес.
Инженерную психологию прежде 'всего интересует сравнительная оценка человека п машины по тем функциям, которые они выполняют в процессах циркуляции и переработки информации.
В отношении приема информации несомненные преимущества человека заключаются в том, что возможности его «сенсорного» входа» не ограничены каким-либо одним способом подачи сигналов. Человек может получать информацию и непосредственно от регулируемого объекта, наблюдая за ним, и посредством тех или иных приборов. При этом переход от одного способа к другому, если позволяют условия, осуществляется сравнительно легко. «Сенсорный вход» человека характеризуется значительной пластичностью и гибкостью. Поэтому человек может правильно и точно оценивать сигналы, изменяющиеся по тем или иным признакам в довольно , широких пределах. Так, если говорить о чтении письмен-I ной речи, то человек может читать тексты, напечатанные любым шрифтом и написанные любым почерком. Буквы ' могут значительно варьировать по -величине, наклону, [ форме и т. д., некоторые из них могут быть даже ча-| стичпо стертыми, но это не помешает человеку читать | текст. Возможности существующих «читающих» машин I пока еще весьма ограничены.
| Благодаря пластичности «сенсорного входа» оператор I может оценивать состояние регулируемых объектов не ? только по тем сигналам, которые прямо ему и адресованы, по и по косвенным сигналам, не предусмотренным I схемой системы управления. Благодаря опыту у опера-^ тора укладываются свои способы приема информации, ^ позволяющие ему «брать информацию за пределами рас-£ считанной системы управления». В отношении приема Информации человек не ограничен конструкцией системы управления. Так, предположим, что в системе управления — по расчетам конструкторов — единственным I средством подачи оператору информации об управляемом объекте должен быть тот или иной прибор или их ^Комплекс. Прием информации рассматривается как считывание показаний приборов. Однако часто оказывается, 11То в реальном процессе управления оператор не огра-I Иичивается только считыванием показаний приборов, но
|# 35
ориентируется в обстановке и по многим другим косвенным сигналам (например, по вибрации иола, шуму мотора и т. п.), разумеется, если они доступны для его органов чувств. При этом иногда косвенные сигналы служат для пего источником гораздо большей информации, чем приборы.
В отличие от человека вход у существующих машин ограничен схемой системы регулирования. Машина «видит» и «слышит» лишь те сигналы, которые только ей и адресованы, и может принять их лишь в той форме, которая была заранее определена конструктором. Ко всем другим сигналам машина «слепа» и «глуха».
Человек может с .максимальной выгодой использовать избыточность информации. Он способен объединять отдельные сипналы в целостную структуру, что позволяет находить наиболее экономные способы ее «приема и переработки. Способы 'Приема информации машиной ограничены, так же как и ее возможность использовать избыточность информации.
Далее, человек в состоянии «схватить» маловероятные (неожиданные с точки зрения задач данной системы) события. В этом отношении возможности существующих машин пока весьма ограничены.
Что же касается максимального объема информации, •принимаемой и перерабатываемой в единицу времени, то здесь явные преимущества остаются за .машиной. По дакньим ряда авторов, максимальное значение потока информации, которую мо>жет переработать человек, не превышает нескольких десятков двоичных единиц в секунду. Машина же оказывается в состоянии принять и переработать значительно (в сотни и тысячи раз) большее количество информации *.
Большой '.пластичностью и гибкостью характеризуется также деятельность человека и о переработке .примятой информации. Его возможности преобразовывать информацию из одной формы в другую, анализировать и синтезировать поступающие сигналы (практически почти безграничны. В зависимости от условий и требований конкретного Процесса управления оператор может при-
1 Правда, нужно отметить, что при разных способах подсчета информации, 'принимаемой и перерабатываемой человеком, .получаются разные и три этом значительно расходящиеся величины. Подробнее этот вопрос рассматривается >в гл. 3. •
36
,Mri!Hii> либо тот, либо иной способ кодировании и декодирования (Принимаемых сигналов, сравнительно легко переходя от одного из них к другому. Человек не ограничен ка!ким-либо одним алфавитом и способен ;при соответствующем обучении работать в разных «-ключах». Одну и ту же операцию по переработке информации он может выполнить, пользуясь различными способами. В npiiiiimiine для человека всегда остается возможность плит новый способ переработки, не предусмотренный Конструктором системы управления. Существующие кибернетические машины моделируют лишь некоторые, далеко не всегда наиболее экономные способы обработки информации, применяемые человеком.
И отношении функции переработки информации так Же, как и в отношении функции приема, человек не огра-, ничей конструкцией системы управления.
Вместе с тем нужчю отметить, что по точности и скорое in выполнения некоторых действий человек значительно уступает машине. Так, операции счета он выполняет значительно медленнее и менее точно, чем это де-Лпет информационно-логическая машина.
['Выступая в роли наполнителя (командной информации, человек также характеризуется большой пластич-"опыо. Пользуясь одним и тем же двигательным ампа-том, он в состоянии выполнять самые разнообразные (ч'к'твия.
Каи< 'правило, существующие автоматические регуляторы являются строго и узко шеп;иализирова1ппы'МИ. .Человек же при некотором обучении с одинаковым 'успехом может осуществлять функции регулятора во многих снаемах управления, «акими бы различными пи были 'Их функциональные и структурные схемы. Он можег ^ei ко и часто менять программы, по которьш должно 'Осуществляться регулирование. Обладая огромной пластичностью, человек способен в случае тех или иных Нарушений (переходить от одного способа выполнения [СВоич функций в системах управления к другим. Маши-Нй же при нарушении перестает работать или начинает
Г отекать грубые ошибки. Ошако, имея возможность «настроиться на любую ;lipoi рммму'\ оператор значительно уступает машине по времени, в течение которого он способен непрерывно ра-
37
ботать по заданной программе. Он сравнительно быстро устает, может отвлекаться, забывать нужное и т. д.
Итак, из всего оказанного следует, что человек-итератор является у Н'Ивер с а л ын ы м и наиболее пластичным «звеном системы управления». Вместе с тем он уступает «машинным звеньям» системы то скорости, а частично и точности выполнения операции и но возможности длительное время непрерывно сохранять заданный режим работы.
Возможности каждого звена системы управления выполнять операции шо приему, переработке, хранению и передаче информации определяются в конечном счете природой тех процессов, посредством которых эти операции осуществляются. Это б равтой мере относится как к «машинным званьям» системы, так и /к человеку. Перечисленные выше достоинства и недостатки оператора, рассматриваемого <как звено системы управления, вытекают из его физиологических и психических качеств, точно так же как характеристики «машинных звеньев»— из их механических, электрических, магнитных и т. т. качеств. Например, при определении возможности ультразвукового устройства — липши задержки — сохранять информацию (длительность храпения, скорость и точность воспроизведения и т. т.) мы должпь1 дать анализ электромеханических .преобразовании (прямой и обратный пьезоэлектрический эффект), процесса распространения звуковых волн высокой частоты в жидкости и циркуляции электрических импульсов. При оценке возможности человека выполнять функцию хранения информации мы должны обратиться к анализу процессов памяти и механизма замыкания нервтых связей, находящегося в их основе.
При внешнем сопоставлении человека и машин, включенных в систему управления, мы можем отметить, что человек является универсальным и (наиболее пластичным звеном. Но для того чтобы выяснить основы его пластичности и универсальности, мы должны выйти за пределы внешних сопоставлений и обратиться к анализу природы психической деятельности.
Первый вопрос, который здесь возникает, — это вопрос о том, посредством каких процессов осуществляется прием и переработка информации в «человеческом» звене системы управления. Чтобы ответить на этот во-
38
прос, мы вынуждены рассматривать проблему функций оператора khik звена систем управления в другом аспекте и пользоваться новьш кругом понятий. Описывая «входные» характеристики человека, необходимо обратиться к анализу процессов ощущения и восприятия. В связи с анализом операции человека по переработке информации возникает необходимость изучения процессов памяти, представления, воображения, мышления. Характеризуя особен и ости «выхода» человека, нужно обратиться к проблеме действия: прежде всего к вопросам о структуре действия и механизмах его психической регуляции К
Перечисленные (психические процессы обладают-рядом специфических особенностей и подчиняются определенным объективным законам, которые необходимо учитывать -при определении оптимального режима работы оператора.
Прием и переработка человеком информации, циркулирующей в системах управления, выступают как частный случай процессов познаашя и деятельности.
Естественно поэтому, что инженерная (психология, изучающая функции и характеристики работы оператора, включенного как звено в систему управления, должна опираться на все те достижения, которые накоплены в области исследования .природы и закономерностей психических явлений. Только тогда она сможет дать содержательный анализ особенностей участия оператора в общем процессе циркуляции информации, определить его возможности (а вместе с тем и возможности всей системы) и рационально решить задачу распределения функций между человеком и «машинными звеньями».
'Короче говоря, инженерно-психологическое исследование должно быть не только инженерным, по и психологическим, поскольку человек остается человеком и тогда, когда он выступает в роли звена системы управления.
Среди всех .параметров системы управления наиболее важными (с точки зрения оценки «человеческого фак-
1 К'руг психологических проблем, вытекающих из анализа функций оператора в системах регулирования, здесь очерчен весьма схематически. iB действительности выполнение операции приема и переработки информации, так же как и регулирования, предполагает ансамбль (психических процессов.
39
тора») являются время цикла регулирования, точность и надежность.
Время цикла регулирования. Процесс регулирования состоит в изменении регулируемой величины по определенной программе. Одна из самых общих его характеристик— это время, в течение которого объект 'переводится из некоторого исходного состояния в заданное. Математически процесс регулирования описывается как функция времени.
Анализ «временного контекста» работы системы управления 'предполагает выделение двух взаимосвязанных аспектов. Один из них — это время, необходимое для полного «оборота» сигнала по контуру системы управления, т. е. время преобразований и передачи осведомительной информации от объекта к регулятору и управляющей информации — от регулятора к объекту1. В простом случае одноконтурной системы время цикла регулирования представляет собой сумму времени задержки сигнала во всех звеньях:
i = \
где Т — еремя цикла регулирования;
ti—(время задержки сигнала в г-и звене; . п — количество звеньев в системе управления. Если сравнивать различные звенья системы «человек—машина» по времени задержки сигнала, то окажется, что в этом отношении человек значительно отстает от «машинных звеньев». Время его реакций исчисляется десятыми долями секунды, целыми секундами и даже иногда минутами. «Машинные звенья» обладают большей скоростью реагирования. Так, электронные лампы могут срабатывать в миллионные доли секунды. Поэтому общее время цикла регулирования определяется главным образам временем реакций человека.
Второй аспект связан с вопросом о соотношении временных характеристик контура регулирования и управляемого процесса. Это соотношение определяет степень близости реального хода регулирования к тому, который задан программой. Точное выполнение программы
1 В данном случае имеются в виду только замкнутые системы. 40
ЬЮзможчю лишь в том случае, если время «срабатыва-Гния» регулятора не превышает времени изменения регу-» лируемой величины. Практически оно должно быть всег-\ да меньше. В противном случае выполнение программы становится невозможным: регулятор начинает допускать грубые ошибки и в какой-то момент перестает работать. Из всего сказанного вытекает необходимость изучения временных характеристик реакций человека, чтобы учесть их л'ри расчетах систем управления.
Самой элементарной разновидностью реакций является так называемая простая сенсомоторная р е а к-ция'.В подобных реакциях человек выполняет то или иное движение (например, нажимает на кнопку, перемещает рычат и т. п.) ib ответ на заранее известный, но внезапно 'появляющийся сигнал с возможной для него максимальной скоростью. Время задержки складывается в этом случае из латентного периода реакции (время от момента появления сигнала до начала движения) и времени 'моторного компонента (длительность ответного движения).
Сразу же отметим, что в реальных процессах управления реакции этого вида встречаются редко. Там, где требуется максимально быстрый ответ на заранее известный сигнал, обычно используются как наиболее эффективные автоматы. Однако при измерении латентного периода простой сенсомоториой реакции мы получаем некоторые исходные данТные, относительно которых можно производить вычисление времени и более сложных реакций, характерных для работы оператора.
Многочисленные экспериментальные данные показывают, что латентный период простой сенсомоториой реакции зависит прежде всего от того, на какой анализатор воздействует сигнал-раздражитель, или, иначе говоря, от м о д а л ь <н о с т и ощущения, регулирующего ответное движение.
(В табл. 1 приводятся сводные данные ряда авторов, полученные 'при измерении реакций на раздражители средней (относительно диапазона чувствительности) интенсивности (3. Гератеволь [75], Н. В. Краинский[162],
1 /Нужно отметить, что «простая сенсомоторная реакция» складывается из ряда процессов, т. е. в действительности является не простым образованием. Но в данном случае пас интересует лишь общее время реакции как целого.
41
К. К- Платонов [257, 258], Э. Флейшман и Р. Ганье [389], Р. С. Вудвортс п X. Шлозберг [504]).
таблица' 1
Латентный период простой сенсомоторной реакции при воздействии на разные анализаторы
Анализатор (и качество сигнала-раздражителя)
Латентный период (средняя величина в мсек)
Тактильный (прикосновение)
Слуховой (звук)
Зрительный (свет)
Обонятельный (запах)
Температурный (тепло и холод)
I соленое сладкое кислое горькое •
Вестибулярный аппарат (вращение испытуемого) Болевой
90—2201 120—1801 150—2201 310—3901 280—16001 310 450 540 1080 400 130—8901
1 Указаны наименьшие и наибольшие значения средних величин, полученных разными авторами.
Причину различий между величинами лагенгных периодов реакции нужно искать, по-видимому, в истории развития механизмов регуляции движений. На основании имеющихся данных можно полагать, что тактильная сигнализация является генетически исходной и наиболее интимно связанной с движениями. Этим и объясняется относительная краткость латентного периода реакции, возникающей в ответ на тактильные сигналы. Все остальные анализаторы включаются в' механизм регуляции движений позднее. Вероятно, в соотношениях величин латентных периодов отражается соотношение ролей каждого из анализаторов в рефлекторном механизме регуляции. Однако этот вопрос требует специального исследования. Сейчас лишь подчеркнем, что при расчетах времени реакций человека необходимо учитывать модальность сигнала. Важно также отметить, что, изменяя модальность сигнала, мы можем управлять временем реакций человека,
42
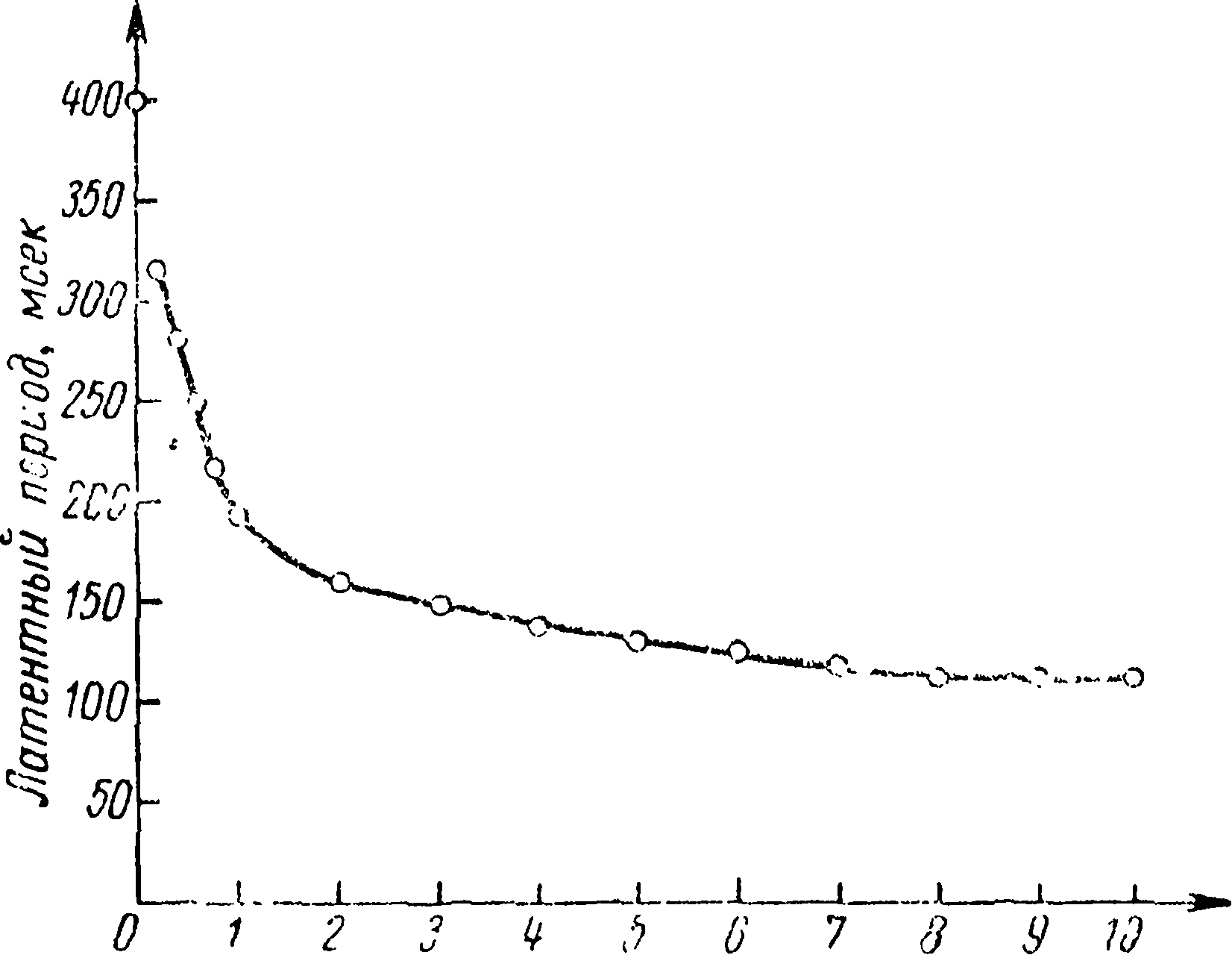
Латентный период простой сепсомоторной реакции изменяется с изменением интенсивности сигнала-раздражителя, на какой бы анализатор этот сигнал пи действовал. Чем больше интенсивность, тем короче латентный период, и наоборот (Е. И. Бойко {30], К. М. Гу-ревич и Т. В. Розанова i[89], M. Ф. Пономарев [260], М. Брнхциш [349], Р. С. Вудвортс и X. Шлозберг [504]). Под'влиянием увеличения интенсивности возрастает также-скорость <и ускорение ответного движения, т. е. сокращается время моторного компонента (Брихцин [349]) l.t Таким образом, время простой сепсомоторной реакции может быть представлено как функция интенсивности раздражителя. На рис. 4 приведены данные Шошоля, полученные при измерении латентного периода реакции па звуковой раздражитель, интенсивность которого изменялась от величины, близкой к порогу чувствительности слухового анализатора, до 100 дб выше порога [370].
Согласно А. Пьерону [по 33], зависимость времени реакции от интенсивности (физической силы) сигнала-раздражителя может быть выражена формулой
<!.=-£—и. (2)
где /v—время реакции:
а —переменная часть времени реакции; к — несократимый минимум, т. е. минимальное время реакции в оптимальных условиях (константа); i— интенсивность раздражителя; п— показатель степени (его величина зависит от конкретных характеристик сигналов и условий опытов). Вопрос о механизмах влияния интенсивности раздражителя на время простой реакции систематически изучался Е. И. Бойко [30, 33]. Подробно проанализировав литературные данные, а также результаты экспериментов, проведенных в его лаборатории. Бойко пришел к выводу, что зависимость времени реакции от интенсивности
1 Данная зависимость проявляется лишь в определенном диапазоне интепенв'постей. Сверхсильный раздражитель может вызвать охранительное торможение. В этом случае реакция либо не -выполняется вовсе, либо ее время возрастает.
43
раздражителя объясняется действием физиологического закона силы, открытого И. П. Павловым [250]. Согласно этому закону, чем больше энергии поступает в нервную систему от раздражителя, тем быстрее протекают процессы во всех ее звеньях и тем энергичнее конечный рефлекторный эффект.
Ухтенсидность, лог. ед.
Рис. 4. Зависимость латентного периода простой сенсомоторпой реакции от интенсивности акустического раздражителя (по ГНопюлю).
Нужно отметить, однако, что этот закон отчетливо проявляется лишь при равенстве всех прочих условий. Под влиянием определенных факторов он может маскироваться. Так, А. Е. Ольшанникова из лаборатории проф. Д. А. Ошанина показала, что в том случае, когда слабый раздражитель имеет особое значение для деятельности человека (например, является аварийным сигналом), время реакции на него может быть короче, чем на сильный, но менее значимый раздражитель [245].
В исследованиях ряда авторов выявлена зависимость латентного периода реакции от пространственных характеристик раздражителя. При увеличении его размеров латентный период, как правило, сокращается (Флейшман и Ганье [389], Вудвортс и Шлозберг [504]).
Время реакции также зависит от того, на какой участок рецепторной поверхности действует раздражитель. Так, при исследовании зрительно-двигательных реакций
44
установлено, что, чем дальше от фовеа (участка сетчатки, обладающего наиболее высокой разрешающей способностью) находится место воздействия света, тем длиннее латентный период (Т. Н. Ушакова [314], Вуд-вортс и Шлозберг [504]). Эта зависимость представлена на рис. 5.
frfjpad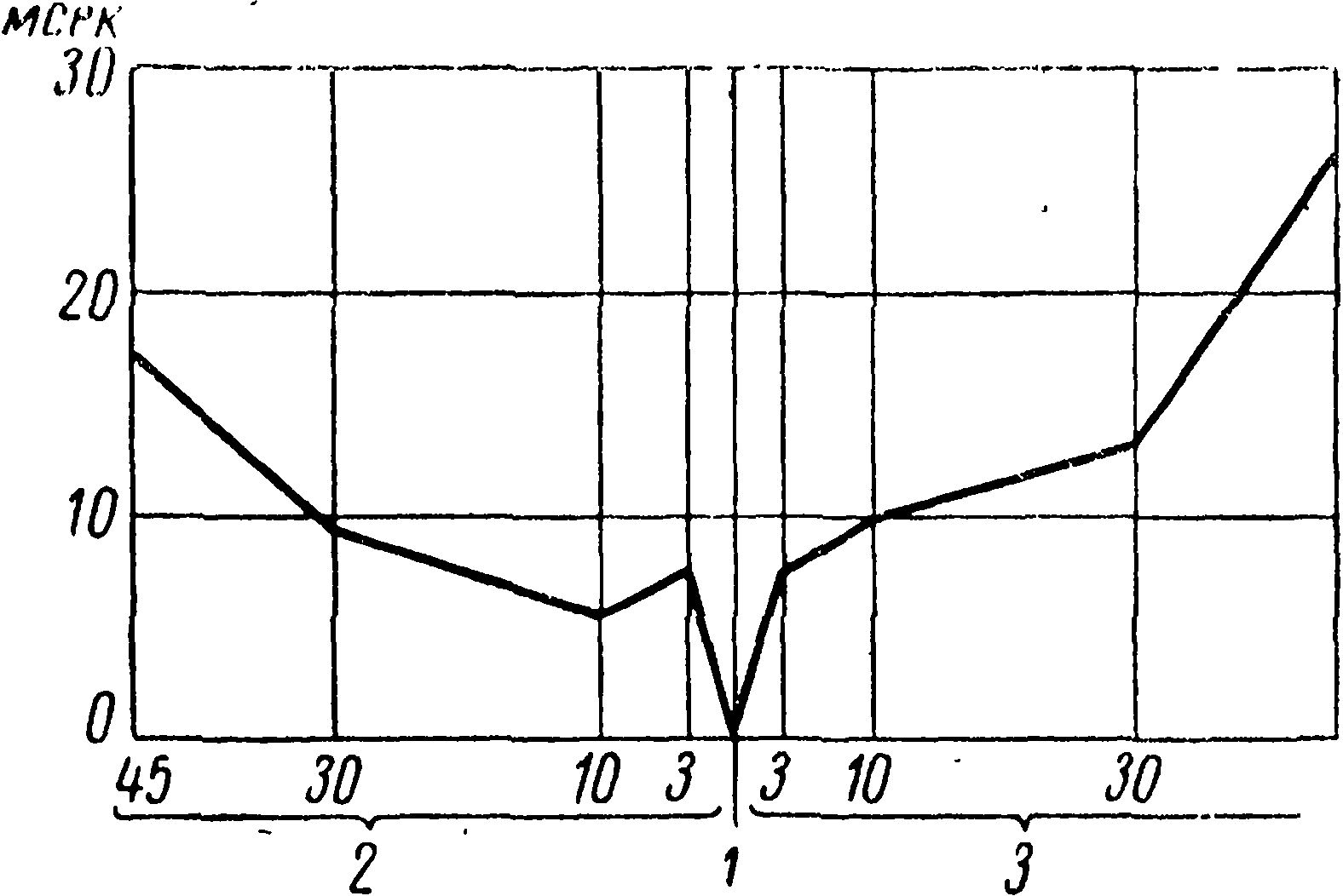
На время реакций влияние оказывают не сами по себе абсолютные характеристики раздражителя (интенсивность, размер), а их отношение к окружающему фону. Общее правило заключается в том, что с увеличением контрастности раздражителя по отношению к фону время реакции на него сокращается.
Сигналом для двигательной реакции может быть не только появление раздражителя, но также его исчезновение или изменение.
По данным Дженкинса, реакция на прекращение действия света короче, чем на его появление, примерно на 13,5% [504]. Это было подтверждено в нашей лаборатории В. М. Водлозеровым.
В его экспериментах на фоне узкой полоски света появлялось темное пятно. Продвинувшись на некоторое расстояние, оно исчезало. Испытуемый должен был нажимать на ключ как при появлении, так и при исчезновении пятна. Оказалось, что средняя величина латент-
45
ного периода реакции па исчезновение раздражителя короче, чем на появление. Разница составляет примерно 8%.
Как показал Штеймап, реакция па увеличение интенсивности света имеет больший латентный период, чем на уменынение. Прн этом время реакции зависит от величины изменения: чем она больше, тем реакция короче [504].
В исследовании Водлозерова измерялся латентный период реакции на изменение скорости движущегося пятна. Было обнаружено, что реакция на ускорение примерно на 15% короче, чем па замедление. Выявилась также зависимость латентного периода от того, насколько величина ускорения превосходит порог зрительного различения изменений скорости (дифференциальный порог). В целом, чем больше это превосходство, тем короче латентный период.
Зависимости времени реакции от качества, интенсивности и пространственных особенностей сигнала-раздражителя, обнаруженные при изучении простых сепсомо-торных реакций, проявляются и в других их разновидностях. Правда, там эти зависимости могут маскироваться действием некоторых новых факторов.
Второй разновидностью сепсомоторпых реакций является р е а к ц и я п а д в и ж у щ и й с я о б ъ е к т, сокращенно называемая РДО. Здесь сигналом для моторного ответа является момент достижения движущимся объектом некоторой заданной точки. По экспериментальным данным латентный период РДО при прочих равных условиях короче латентного периода простой сенсомоторпой реакции. Его величина колеблется от 10 до 150 мсек (В. А. Горовой-Шалгап- [86], В. В. Чебы-шева [321]). Как установил Н. В. Зимкип, время РДО зависит от времени предшествующего наблюдения за сигналом (от «времени предшествования»). Если это время более 300 мсек, то латентный период не превышает указанных величин. Если же оно короче, то латентный период РДО приближается к латентному периоду простой сенсомоторпой реакции [120].
К. К. Платонов, изучая процесс тренировки РДО, выявил различия в способах восприятия движущегося объекта: способ «поводка» и способ «вилки» [257].
46
По данным М. Ф. Пономарева, время РДО зависит от соотношения процессов возбуждения и торможения в коре больших полушарий, которое определяет диффе-ренцировку времени [260]. В исследованиях Чебытневой было установлено, что при соответствующей тренировке человек может научиться достаточно точно реагировать даже в тех случаях, когда движущийся объект имеет значительную скорость (5 000 км/час при дистанции наблюдения 450 м и, вероятно, еще большую). Она показала, что важнейшим условием точных РДО является величина поля обзора. Его уменьшение влияет па точность реакции гораздо больше, чем увеличение скорости движущегося объекта. Чебышева установила также, что в процессе тренировки изменяется способ восприятия объекта. -Это выражается в специальных приспособлениях зрительного анализатора: общем приспособлении к восприятию движущихся объектов; использовании периферического зрения; фиксации точки упреждения [321].
Как простая реакция, так и РДО предполагают ответ па одиночный сигнал. Но в реальных условиях управления человеку обычно приходится иметь дело со многими сигналами, причем каждый требует определенного ответа.
Примером экспериментальной модели некоторых моментов деятельности оператора в сложных условиях может служить дизъюнкт и в п а я реакция (реакция выбора). В данном случае испытуемому предъявляется несколько заранее известных сигналов, па каждый из которых нужно отвечать определенным, также известным движением (или па одни отвечать, па другие нет).
Исследования показали, что латентный период дизъюнктивной реакции превышает время простой реакции. При этом его величина тем больше, чем из большего числа сигналов осуществляется выбор.
По подсчетам Хика, латентный период дизъюнктивной реакции пропорционален логарифму альтернативных стимулов при условии равной вероятности их появления. Это позволило предположить существование функциональной зависимости латентного периода от информации, содержащейся в стимуле [409]. Предположение В. Хика было подтверждено в экспериментах Р. Хайме-на, который применил три различные способа варьиро-
47
вания информации па стимул: 1) изменение числа равновероятных стимулов, 2) изменение вероятности их предъявления, 3) изменение условной вероятности их предъявления [413].
Зависимость между латентным периодом дизъюнктивной реакции и информационным содержанием сти-
* 600
I
g
200
Знтропия, dum
Рис. G. Зависимость латентного периода дизъюнктивной реакции от информационного содержания стимула (по Хай-мену):
/ — результаты экспериментов, в которых изменялось» число равновероятных стимулов (лампочек); 2 — результаты экспериментов, в которых изменялись вероятности предъявления стимулов; 3 — результаты экспериментов, в которых изменялась условная вероятность предъявления стимулов.
мула представлена на рис. 6, которая может быть выражена формулой
RT = a + bH, u (3)
где \RT — время реакции; а и b — константы;
Я — средняя информация па стимул. Клеммер получил экспериментальные данные, позволившие распространить этот вывод и на простые сеисо-моторные реакции [416, 417].
Поскольку зависимость между латентным периодом реакции и количеством информации на стимул является линейной, естественно было предположить, что макси-*
43
мальпая скорость передачи информации человеком («пропускная способность») является константной1.
Кроме перечисленных существуют также и другие разновидности сенсомоторных реакций: серийные, дозировочные, прослеживающие, реакции с переключением и т. д. Однако сейчас мы на них останавливаться не будем и вернемся к вопросу о реакциях в несколько иной связи в гл. б2. Мы не останавливаемся также на вопросе о сенсоречевых реакциях, поскольку они изучены еще недостаточно. Отметим только, что латентный период реакций этого вида значительно больше (в 5—6 раз), чем сенсомоторных. В среднем он равен 1,5 сек.
Как показывает далеко не полный перечень данных, время сенсомоторных реакций определяется многими факторами и является функцией многих переменных. Особый интерес для инженерной психологии представляет тот факт, что время реакций зависит при прочих равных условиях (тренировке, утомлении и т. д.) от характеристик сигнала-раздражителя. А это значит, что, изменяя сигнал по модальности, интенсивности, положению в сенсорном поле, величине, длительности, вероятности предъявления, можно управлять временем ответных реакций человека.
Влияние особенностей сигнала на время реакций нельзя понять, если рассматривать их безотносительно к воспринимающему и двигательному аппаратам чело-
1 Подробнее вопрос о применении информационных мер к ана лизу деятельности человека рассматривается в гл. 3.
2 «Спектр реакций» человека весьма широк. При этом различ ные виды реакций .связаны друг с другом массой переходов. Одной из важнейших задач психологии является создание научной класси фикации реакций, построенной на основе генетического /принципа. В психологии имеется немало попыток классификации. Так, К. Н. Корнилов разделил реакции на натуральные, моторные, сен сорные, различения, выбора, узнавания, ассоциативные. Он отмечал, что каждый из этих видов имеет много вариаций [156]. Однако его классификация вряд ли может быть принята, так как в ее основе пет четкого принципа. Корнилов искусственно разрывает отдельные звенья рефлекторных механизмов реакций. Очевидно, подлинно на учная классификация может быть создана только на основе после довательной (рефлекторной теории и требует 'детального анализа «начала, середины и конца» (И. М. Сеченов) рефлексов, которые лежат в основе механизма регуляции произвольных движений че ловека.
4—2280
49
века, а также к процессам регуляции ответных движений.
Согласно экспериментальным данным наиболее значительная часть времени латентного периода реакции уходит на прием и переработку сигналов и гораздо меньшая— на формирование двигательного ответа. Так, по данным И. А. Пеймера, в простой сенсомоторной реакции первый компонент требует 60—75 мсек, а второй — 40—60 мсек. В дизъюнктивной реакции первый компонент занимает уже около 80% общего времени латентного периода [256]. Это значит, что оптимизация способа передачи человеку сигналов в соответствии с закономерностями познавательных процессов может дать больший эффект (в смысле сокращения времени реакции), чем упрощение ответных движений.
Как показывают исследования, одним из важнейших условий, от которого зависит время реакции, является функциональное состояние анализатора. Установлено, что изменение чувствительности анализатора в процессе адаптации дает по отношению к латентному периоду простой реакции примерно тот же эффект, что и изменение интенсивности сигнала. Так, в опытах Ховлапда измерялось время реакции па свет 250 лк после адаптации глаза к свету 200, 150, 100, 50 лк и к полной темноте. Результаты измерения таковы;
Интенсивность адаптирующего спета, лк . . . 200 1 ПО 100 50 . 0 Латентный период реакции па свет 250 лк (мсек) 154 MG 144 140 131
По экспериментальным данным, латентный период зависит от особенностей взаимодействия сторон бире-цепторных анализаторов. При бинокулярном, бинау-ралыюм, дприпическом восприятии сигнала он заметно короче, чем при монокулярном, мопауралыюм и мопо-риническом (Б. Г. Ананьев [4—6], Вудвортс и Шлозберг [504]).
Время реакции зависит также от того, каким органом производится движение. Латентный период реакции, выполняемой верхними конечностями, короче, чем нижними, а ведущей рукой короче, чем неведущей. Важен также тип движения (нажим, перемещение, вращение и т. д.) (К. Н. Корнилов [156]).
Значительное влияние на скорость реакции оказывает характер так называемой установки. Впервые на это указал Л. Ланге, обнаруживший, что при «моторной
50
установке» (испытуемый направляет свое внимание почти исключительно на движение) реакция короче по времени, чем при «сенсорной» (испытуемый направляет внимание почти исключительно на раздражитель). По данным ряда авторов (К. Н. Корнилов, Л. Ланге, Г. Мюнстерберг, Титчеиер и др.), время реакции в первом случае примерно на 50% меньше, чем во втором
В экспериментальной психологии имеются многочисленные данные, которые показывают, что в процессе уиражпепия латентный период сеисомоторпых реакций сокращается и стабилизируется. Это было подтверждено и экспериментами автора, в которых изучались серийные двигательные реакции па оптический раздражитель (ряд простых графических движений в ответ на -зажигание лампочки). Длительность тренировки равнялась 25 экспериментальным дням. Ежедневно в течение олпого двадцатиминутного опыта каждый из шести испытуемых выполнял по 10 проб. Вычислялось среднее время реакции и квадратическое отклонение за каждый опыт по каждому испытуемому. Затем определялся коэффициент вариативности, по которому мы судили о степени стабильности времени реакции. Результаты экспериментов приведены па рис. 7.
Обращает па себя внимание то, что в первые дни опытов величина коэффициента вариативности возрастает. Очевидно, этот 'период является «поисковым», ориентировочным: испытуемый пробует различные приемы выполнения реакции, выбирая оптимальный для себя. После этого начинается собственно тренировка, в ходе которой по мере упрочения услов'порефлектор-ных связей, лежащих в основе реакций, время реакции постепенно достигает определенного уровня и стабилизируется. Это выражается в уменьшении коэффициента вариативности.
По данным И. В. Терешкпной, сокращение и стабилизация времени реакции в процессе тренировки связаны с перестройкой механизма ее регуляции, прежде всего с изменением взаимоотношений рече-мыслитель-ных и сенсорных процессов [305].
Исключительный интерес для понимания механизмов реакции представляют данные С. Г. Геллсрштейпа, который показал, что человек может научиться произвольно регулировать время своих реакций с точ-
ностыо до сотых долей секунды. Это становится возможным в том случае, если он овладеет «чувством времени», т. е. способностью непосредственно чувственно оценивать время реакций [70].
Имеются также данные об изменении времени реакций под влиянием утомления (В. Г. Асеев [13]), его
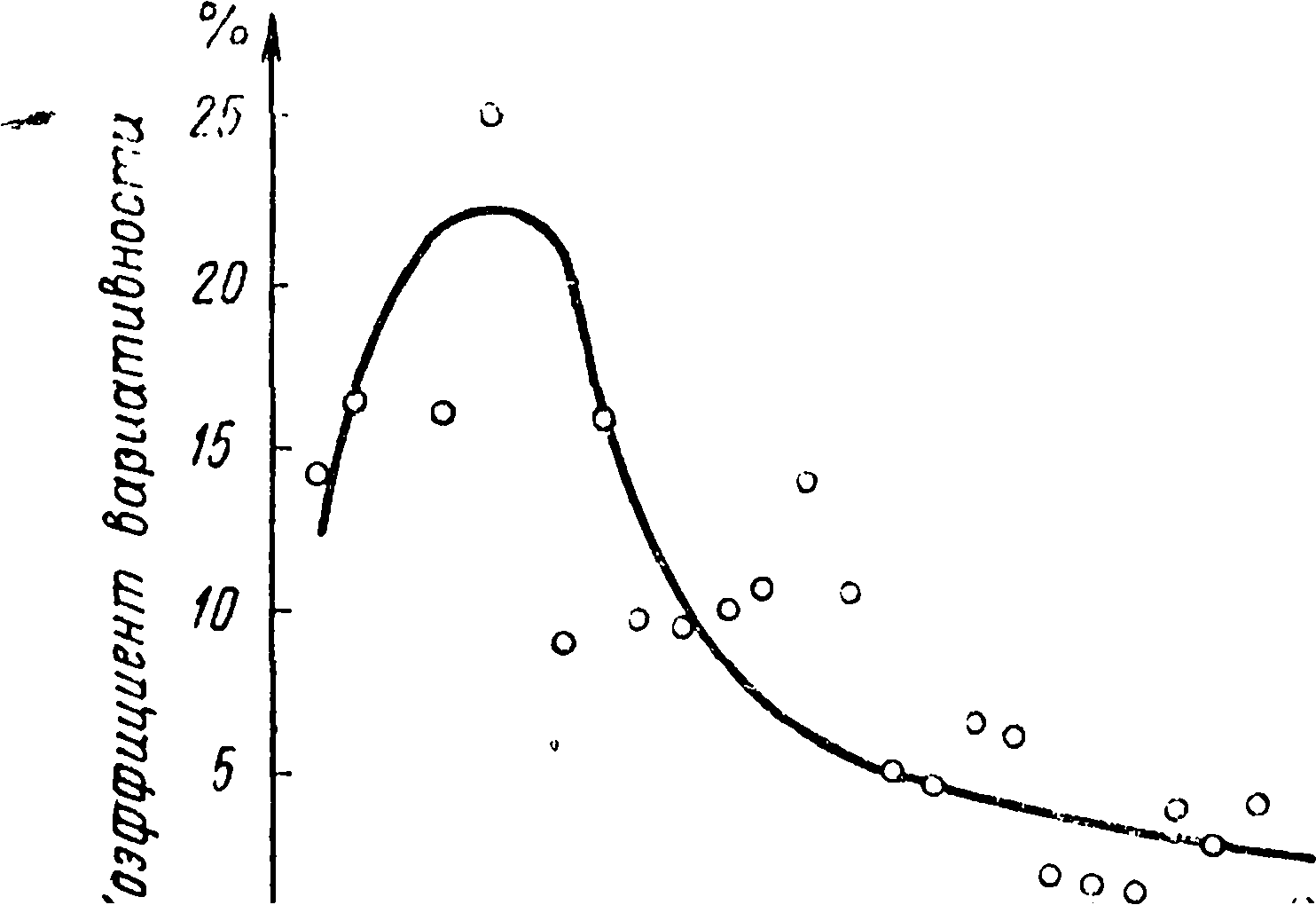
*" 1 1 . . . 1 . i , > t , , , ., I . . . . I ■ . >■ ■ Y »
5 10 15 10 25
Дни опыт'од
Рис. 7. Стабилизация латентного периода реакции и процессе тренировки.
зависимости от индивидуальных и возрастных особенностей человека (Е. И. Бойко [32], Л. С. Выготский [64], К. Н. Корнилов [156], С. Н. Сафарян [281], Н. Е. Биррен, Н. Брожек, А. Т. Велфорд, В. Р. Майлс и др. [457]) и ряда других факторов К
В связи с развитием техники человеку иногда приходится работать в специфических, отличающихся от обычных, условиях. В этой связи определенный интерес представляет вопрос о влиянии на время реакции такого фактора, как перегрузка. Исследование А. Р. Ко-товской, В. К. Философова, Н. А. Чехопадского и
1 Мы привели лишь несколько .примеров, характеризующих время реакций человека и его зависимость от различных факторов. Отметим, что изучение времени различных видов реакций человека имеет более чем столетнюю историю, 'В ходе которой накоплена огромная масса данных. Систематическое их обобщение и 'попытка единого теоретического толковаишя имеется в недавно вышедшей монографии Е. И. Бойко «Время реакции человека ('история, теория, современное состояние и практическое значение хронометрических исследований)» [33].
52
В. А. Чичкииа показало, что время /Простой реакции па визуальные сигналы увеличивается (прямо пропорционально величине перегрузки. Была обнаружена также аналогичная зависимость времени реакции от величины угла между центральной («голова — ноги») осью оператора и горизонталью при постоянной перегрузке [159]. Данные 'представлены на рис. 8.
ее* 90°
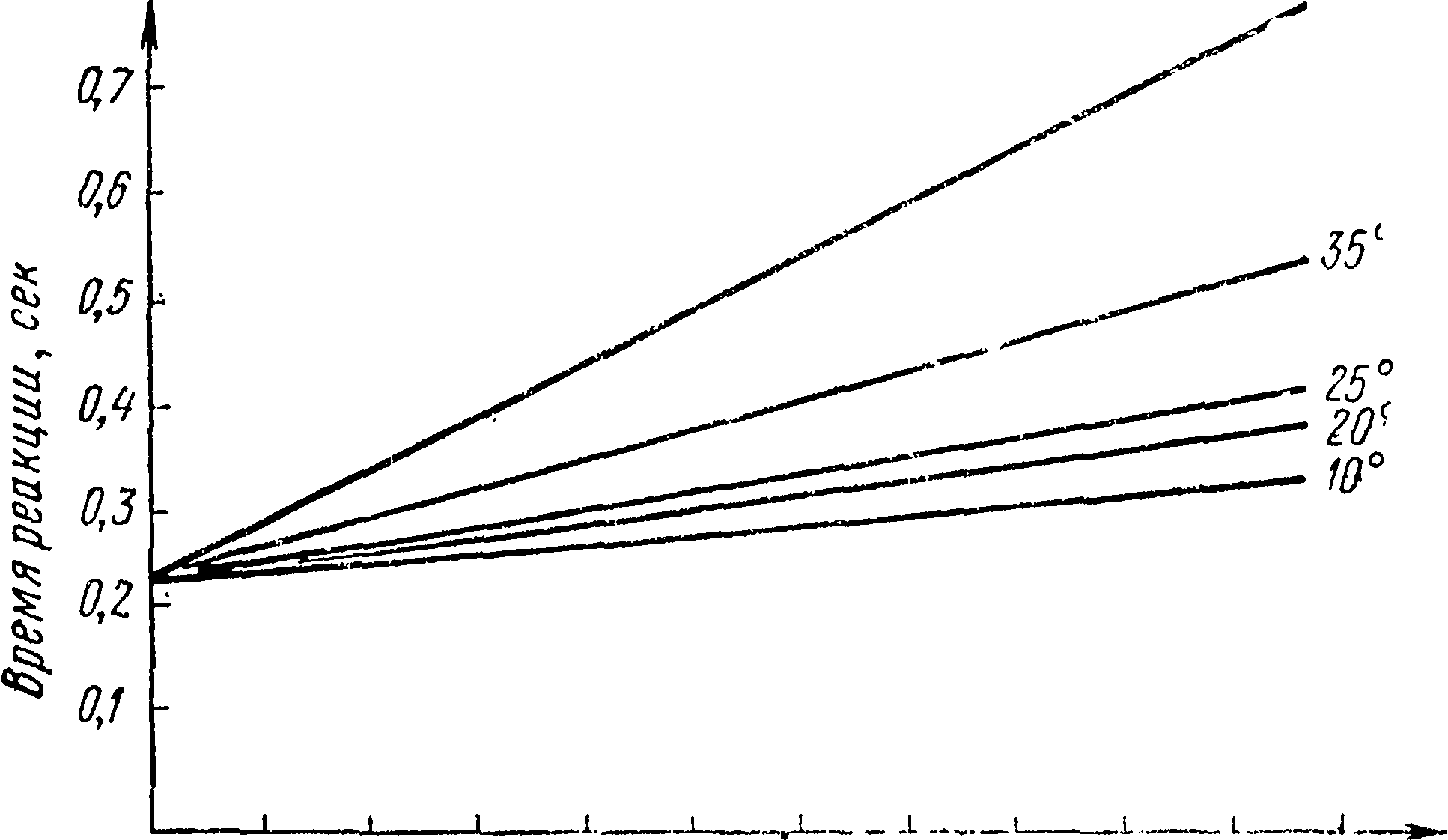
0 12 5 4 5 6 7 8 9 W П
Величина г№ре?рузки, д
Рис. 8. Зависимость времени двигательной реакции на визуальные сигналы от перегрузки (по А. Р. Котовскон, В. К. Философову, Н. А. Чехоиадекому и Н. А. Чич-кипу). ее — угол между центральной ocf>io тела оператора и горизонталью.
Аналитически указанная зависимость может быть описана формулой
^p = 0,21 -f n (0,05 + 0,033а), (4)
где tv—время реакции, сек;
п — величина перегрузки в единицах g\ а—угол наклона кресла оператора относительно горизонтали, pad. Авторы объясняют влияние перегрузки на время реакций тем, что при перегрузке ухудшается кровоснабжение головного мозга и сетчатки глаза. При этом возникают признаки зрительных нарушений и ухудшение работоспособности.
53
'В зарубежной психологии принято делить все факторы, влияющие па реакции, ша две грунты: внешние, объективные (вытекающие из особенностей сигнала), и внутренние, субъективные (вытекающие из особенностей человека). Эта точка зрения отчетливо выражена Вуд-вортсом и Шлозбергом [504]. Такое деление практически удобно па первых порах исследования, по оно пе может быть возведено в принцип исследования реакций, так как построено па искусственном противопоставлении внешнего и внутреннего. Реакция в этом случае выступает как нечто .находящееся между двумя параллельными! рядами.
Из самой сути рефлекторных механизмов реакции следует, что внешний раздражитель становится ее сигналом лишь в том случае, если он так или иначе отражается в состояниях нервной системы (и организма в целом); с другой сторошы, внутренние состоящий организма неизбежно опосредствуются внешними воздействиями.
Анализируя механизмы реакций, Е. И. Бойко показал, что воздействие раздражителя, вызывающего тот или иной ответ, опосредствуется сложнейшей динамикой процессов в нервной системе. Так, даже простая реакция па визуальный раздражитель по предварительной инструкции предполагает работу сложного системного механизма. В этом случае произвольное ответное действие детерминируется через два главных входных канала: слуховой и зрительный. Кроме того, поскольку здесь имеется условнорефлекторпое движение, необходимо принять во внимание дополнительный входной канал — кинестетический аппарат, работающий но .принципу обратной связи. Четвертый входной капал связан с ретикулярной формацией и представляет собой параллельное по отношению к трем предыдущим образование. Сложным является и выходной канал, который включает наряду с двигательным также секреторный, сердечно-сосудистый и дыхательный компоненты. Понятно, что при таком строении афферентных и эфферентных звеньев реакции в центральных частях ее механизма должна развернуться сложная система процессов, включающая двусторонние (прямые и обратные) связи между этими частями, взаимодействие специфических и пе-специфнческнх путей проведения возбуждения, динами-
54
ческую перегруппировку временных нервных связен п т. д. [33].
Структурная схема механизма реакции, предложенная Бойко, приведена на рис. 9.
Рассматривая множественность факторов, влияющих на реакцию (как внешних, так и внутренних—по классификации некоторых зарубежных авторов), Бойко справедливо подчеркивает, что существует единая зависимость между внешними условиями, физиологическими механизмами и течением процесса реакции во времени.
Многочисленность факторов, влияющих на время реакции,v свидетельствует о сложности ее рефлекторных механизмов. Это становится еще более очевидным, когда мы переходим от элементарных реакций к трудовым действиям человека.
В интересующем нас аспекте конечный вывод из приведенных данных заключается в том, что, определяя время действий оператора, необходимо в каждом конкретном случае детально рассмотреть особенности воздействующих па него раздражителей, условий труда и изучить те состояния, которые этими условиями вызнаны. Отсюда вытекает необходимость анализа структуры и механизмов регуляции трудовых действий оператора и динамики его связей с другими звеньями системы управления.
Вместе с тем приведенные факты указывают на возможность повышения скорости реакций оператора путем рационального конструирования сигнальных устройств, органов управления и организации условий труда. Однако эти возможности ограничены. Впрочем, в существующих системах управления от человека и не требуется реагировать со скоростью электромагнитные реле или электронных ламп. Более важно добиться стабилизации времени действий оператора и научить его произвольно регулировать это время.
Приведенные данные о времени реакций человека получены в лабораторных условиях и не могут быть непосредственно использованы при расчетах быстродействия систем управления. Однако сформировавшиеся в психологических исследованиях представления позволяют наметить подход к такому расчету. Зная основные закономерности, мы можем выявить те факторы, кото-
55
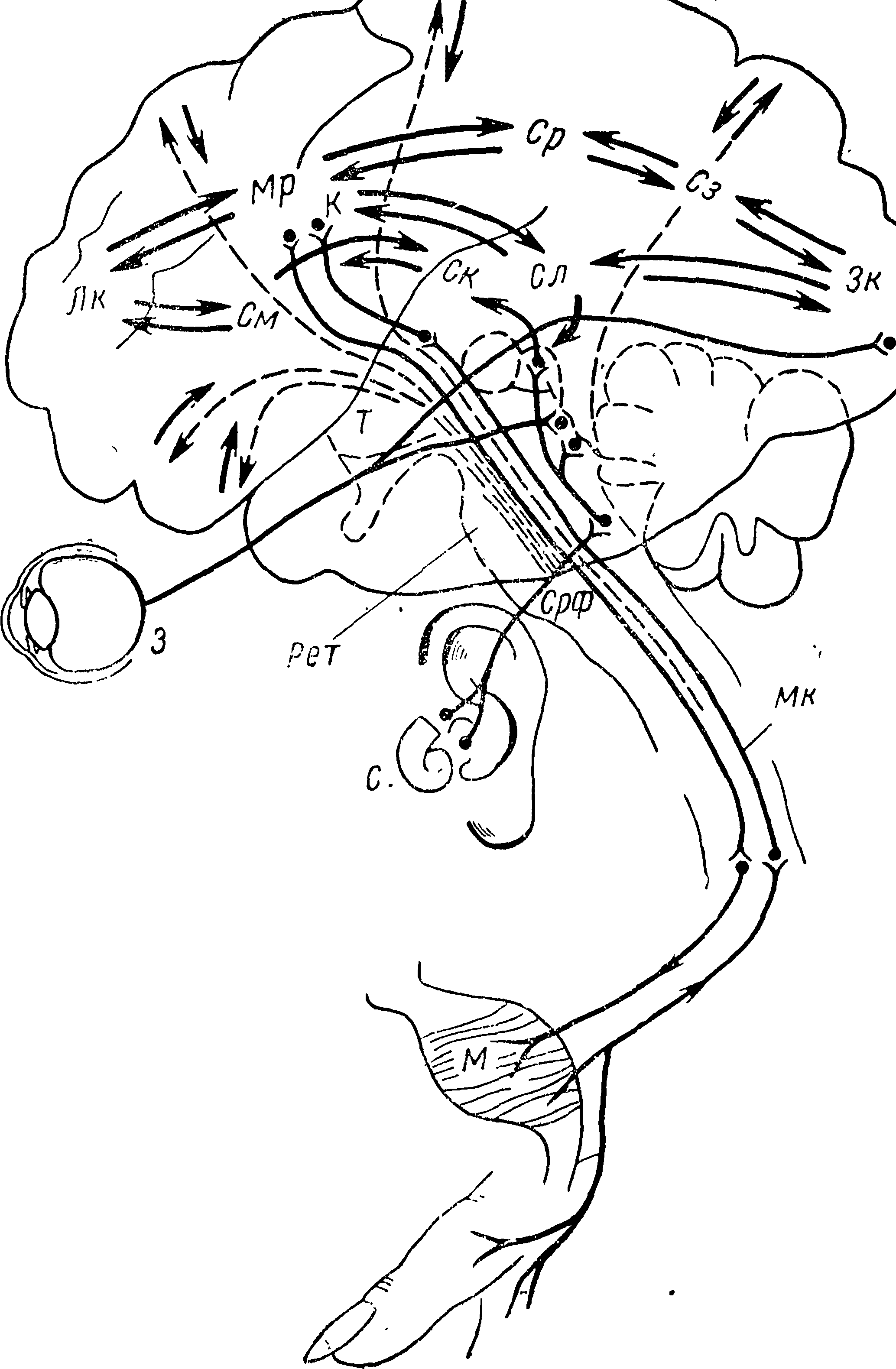
Рис. 9. Схема главных нервных путей (по Е. И. Бойко):
С — слуховой рецептор; 3 — зрительный рецептор; М — мышцы; Мк, — мы-шечно-кинестетический путь; Рет — ретикулярная формация; Мр -корковая проекция ответной реакции руки; Мр—М — нисходящий двигательный путь; Ск — слуховая кора; Сл — слухо-речевая зона; Сз — словесная проекция зрительных раздражителей; См — словесно-моторная зона; Ср—словесная проекция ответной реакции руки; Лк — лобная кора; Зк — зрительная кора; Срф — нижнестволовый отдел ретикулярной формации; Т — таламический отдел ретикулярной формации. Пунктиром обозначена восходящая активирующая система. Стрелками показана двусторонняя функциональная связь между нервными центрами.
5$
рые ,в данной конкретной системе будут влиять на время задержки сигнала в звене «человек», определить /приблизительно порядок этого времени и предсказать, как оно изменится при изменении конструкции индикаторов и органов управления. Для более точного расчета необходимо анализировать деятельность оператора и выявить ее составляющие.
К сожалению, пока еще инженерная психология не располагает разработанными методами анализа временных характеристик деятельности оператора, но в этом направлении ведутся работы многими исследователями.
Заслуживает внимания попытка рассчитать «полное время оператора», -предпринятая В. И. Николаевым [214]. Исходя из гипотезы последовательного развертывания действия, он представил,«время оператора» как сумму следующих составляющих: процесса приема сигнала (поиск изменений на информационной панели и непосредственное восприятие сигнала), выявления сигнала (выделение, выбор из множества возможных сигналов того, который внесет необходимую в данный момент информацию), определения сообщения (создание картины течения управляемых 'Процессов на основе сигналов, т. е. интерпретация), процесса решения задачи, формулирования решения (перевод решения на «язык» выходных сигналов), поиска средств реализации команды-информации, реализации решения (подготовительные движения и процесс непосредственного кодирования команд-информации).
Как справедливо отмечает Николаев, гипотеза последовательного развертывания действия обладает тем достоинством, что на ее основе «время оператора» может быть определено с завышением или, во всяком случае, не занижено.
Опираясь на психологические данные, Николаев предложил систему формул, позволяющих рассчитывать время задержки сигнала в звене «человек-оператор».
Особое внимание он уделяет зависимости этого времени от количества информации, с которой приходится иметь дело оператору. Систематизировав данные, полученные разными авторами, Николаев представил их в единой системе -координат (рис. 10). Из графика видно, что во всех случаях имеется линейная зависимость между количеством принимаемой информации и време-
57
нем ответного действия, которая может быть описана формулой (3). Вместе с тем начальные точки прямых (конкретные значения константы «а») и угол их наклона [коэффициент регрессии, константа «в», по формуле (3)] по данным разных авторов являются различными.
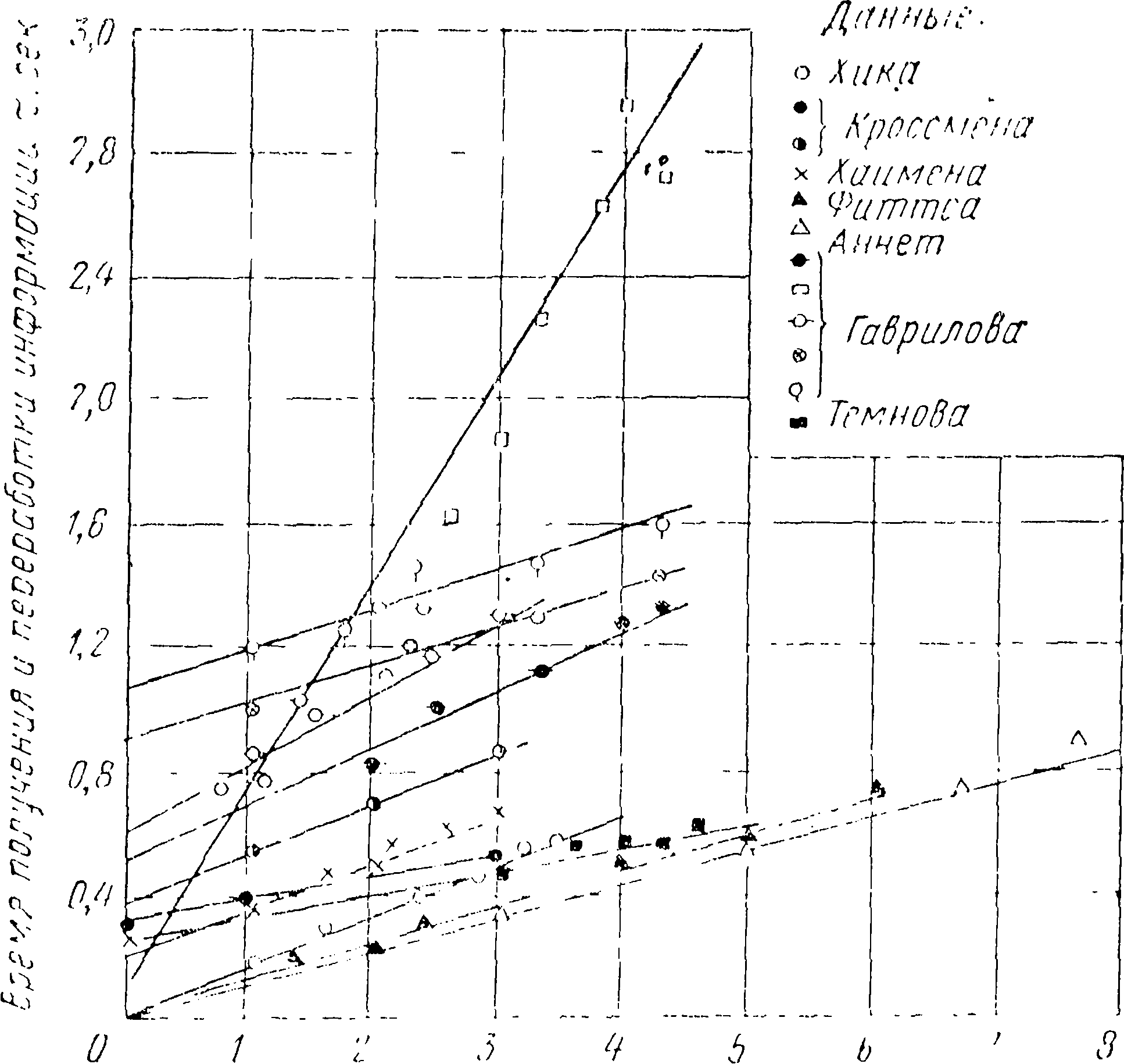
Коли честбо по и пи war* tou и чсрормации I. h:m
Рис. 10. Сводный график данных о зависимости времени ответного действия человека о г количества принимаемой информации (по В. И. Николаеву).
Это можно объяснить различиями в условиях экспериментов и тем, что исследователи определяли лишь общее нерасчлененное время ответных действий. На основании представления о составляющих «полного времени оператора» Николаев выделил только то время, которое затрачивается на получение и преобразование информации. Это -позволило ему связать разрозненные данные и 'выразить их единым уравнением
/с = 0,03//, (5)
58
где х — время получения и преобразования информации; Я —количество информации, перерабатываемой one-
ратором. Графически общая зависимость, полученная в результате обработки данных разных авторов, представлена на рис. 11.
1\ К-
^3 ^
2,4
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
ViO |
5 |
0 |
6 |
0 |
7 а Л |
0 |
^^ |
|
|
о |
|
|
|
||
L^ |
о] |
|
|
|
|
|
10 20 30 40
Количество принимаемой информации Д $ит
Рис,
11. Зависимость времени получения и переработки инфор-ацпп человеком от ее количества (по В. И. Николаеву).
Расчленение полного времени оператора на составляющие особенно важно в тех случаях, когда деятельность оператора жестко ограничена временными параметрами системы управления, т. е. когда действие, выполненное с запозданием, равносильно ошибке. Здесь общее время действия человека должно быть меньше некоторого предельного 'времени (или в крайнем случае равно ему). Зная составляющие полного времени оператора и их зависимости от различных факторов, можно найти наиболее слабое звено (требующее наибольшего времени) и путем изменения способа передачи информации, или конструкции органов управления, или характера задачи и т. п. сократить это время. Например, можно сократить время приема визуального сигнала, выделив его из окружающих с "помощью цвета, формы и т. п., или сократить время определения сообщения,* воспользовавшись 'принципом «картинности» (см. гл. 4,
59
5), или сократить время реализации решения, расположив органы управления в соответствии с данными динамической антропометрии (см. гл. 6). На эти возможности указывают В. П. Зинченкю, А. Н. Леонтьев и Д. Ю. Панов [127].
Большие возможности в отношении сокращения «полного времени оператора» открываются в связи с применением информационно-логических машин. Включение в контур регулирования систем «человек — машина» устройств, производящих 'первичную обработку информации и «подсказывающих» возможные пути решения задачи, позволяет значительно сократить время, необходимое оператору для выполнения его основных действий. В этой связи мы сталкиваемся с вопросом о распределении функций между человеком и машиной, эффективное решение которого требует детального анализа состава деятельности оператора.
Та'кой анализ необходим также для организации обучения оператора, особенно для формирования у него способности произвольно регулировать время своих действий.
Заканчивая краткую характеристику относительной доли «человеческого фактора» в общем времени цикла регулирования, укажем на одну до сих пор еще не решенную 'проблему.
Большинство исследователей, анализируя деятельность человека-оператора, склонны рассматривать ее как ряд последовательно выполняемых действий. Такой подход вытекает из предположения о том, что механизм переработки информации, свойственный человеку, функционирует как одноканальная система [352]. Отметим, что гипотеза «одноканальности» имеет ряд экспериментальных подтверждений. Вместе с тем в психологии и физиологии накоплено немало экспериментальных данных, которые позволяют рассматривать механизм приема и переработки информации как иерархическую многоуровневую систему. При таком подходе допускается возможность одновременного выполнения нескольких действий.
При изучении временных характеристик деятельности оператора эта проблема выступает, на наш взгляд, как основная. Суть ее сводится к следующей альтернативе: функционирует ли механизм приема и переработки
60
информации, свойственный человеку, как одноканальная система, или он построен таким образом, что допускает возможность одновременного приема и переработки нескольких потоков информации?
От того, как будет решена эта проблема, зависит определение подхода к изучению и измерению временных характеристик деятельности оператора, а также разработка методов расчета времени задержки сигнала в звене «человек» и, следовательно, общего времени цикла регулирования в системе «человек — машина».
Точность. При оценке любой системы управления неизбежно возникает вопрос о том, насколько точно она работает.
В целом требования к точности системы управления, а следовательно, и величина допускаемых 'погрешностей определяются, с одной стороны, программой, по которой она работает, а с другой — характеристиками регулируемых объектов и процессов. Чем сложнее программа, тем большая точность требуется при выполнении каждого ее этапа. Незначительная погрешность, допущенная где-либо в начале осуществления 'программы, может к концу перерасти -в серьезную ошибку, которая сведет на нет всю работу или, еще хуже, 'приведет к аварии.
То же относится и к характеристикам управляемых объектов. Чем они сложнее, тем более серьезны последствия ошибо'к, допущенных в шроцессе управления. При одновременном управлении системой взаимосвязанных объектов ошибка, касающаяся одного из них, может вызвать целую цепь ошибок, и нарушить всю систему.
Известно, что вероятность безошибочной работы системы в целом (при последовательном соединении элементов) равна > произведению вероятностей безошибочной работы каждого элемента:
Р» = РаРьРс.Рп, (6)
где Р8 — вероятность безошибочной работы всей системы; Ра,ь,с,---,п — вероятность безошибочной работы элементов. Если бы единственным путем ik повышению точности системы управления было ее усложнение, а усложнение
61
во всех случаях снижало вероятность безошибочной работы, то проблема была бы неразрешимой. К счастью, это не так. В принципе возможно добиться достаточно высокой точности в работе любой системы, как бы сложна она ни была. По для этого необходимо подробно изучить условия работы каждого звена, выявить его характерные ошибки, оценить их относительную долю в конечной ошибке 'Всей системы, вскрыть причины возникновения ошибок, а тем самым и наметить шути их ликвидации.
Большое значение для решения этой задачи имеет изучение ошибок оператора. Многие из них вытекают из несогласованности конструктивных особенностей машин с характеристиками человека и могут быть устранены путем реконструкции отдельных элементов системы управления на основе рекомендаций, разработанных инженерной психологией.
В психологических исследованиях все ошибки, допускаемые человеком, принято делить на постоянные и переменные.
Постоянная ошибка есть различие между средним значением большой серии измерений и истинной, или ожидаемой, 'величиной. Переменная ошибка измеряется некоторым статистическим количеством, которое определяет дисперсию отдельных измерений.
Постоянная ошибка обычно находится путем вычисления средней арифметической от всех допущенных ошибок (включая нулевые). При этом учитывается знак каждой из них (+ или —):
М,= 4г* (7)
где Мс—постоянная ошибка; 2е — сумма ошибок; N— число испытаний.
На рис. 12 приведена типичная гистограмма распределения ошибок, допускаемых оператором радиолокационной установки при оценке расстояния до цели (по А. Чапа'нису [357]). Здесь средняя постоянная ошибка равна 138,8 ярда (около 126 м).
Если каждый из элементов системы управления характеризуется какой-либо постоянной ошибкой, то
62
ошибка всей системы будет вычисляться как их алгебраическая сумма 1'
Mes = Mea + Meb + Mec+... + Mrn, (8)
где Mes — постоянная ошибка всей системы, Меа Ьс п —постоянная ошибка компонентов а, Ьу с, .. ., /?.
м
и |
м |
1 Пи J 'ММ |
1 П I I .M + 70 1 1 1 1 11 1 , > ги МП |
гЛ 1 ЯШ |
1 1 1 || 1 1 1 1 ЩШк |
Напрпме]), если оператор при оценке ]\сли допускает ошибку, равную +50 м, электронная система — ошибку, равную —10 ж, а механическая — ошибку +20 м, то общая ошибка в этом случае по формуле (8) будет равна + 60 м.
-1000 ,~500 0 +500 *W0U
Ранг ошибок?п
Рис. 12. Гистограмма распределения ошибок, допускаемых оператором радиолокационной установки при оценке расстояния ло цели (по А. Чапа-
нису).
М — постоянная ошибка, рапная 138,8 ярда
(121) м); о — переменная ошибка, равная
452,9 ярда (411 м). Число дат #=1000.
Средства борьбы с постоянными ошибками системы довольно просты. Если тот или иной измерительный прибор рсегда допускает ошибку, равную ±х, значит, он плохо откалиброван, и путем более тщательной .калибровки мы можем устранить эту ошибку. Если оператор читает показания прибора всегда с некоторой ш ост о янн ой ошибкой (±#), то и эта ошибка может быть легко устрашена с помощью коррекции электронного потока (если речь идет об электронных приборах) или даже просто путем изменения градуировки лицевой части прибора. Зная, что разные люди могут допускать различные ошибки (например, одни недооценивают те или иные величины, другие переоценивают), мы можем заранее предусмотреть в конструкции прибора .некоторое устрой-
1 Здесь, как и в дальнейшем, речь идет лишь о независимых ошибках.
63
ство, .позволяющее изменять градуировку в соответствии с -индивидуальными особенностями работающего опера-гора. Но для этого, конечно, нужно точно установить величину и знак его ошибки.
Определение точности работы системы значительно усложняется, как только мы обращаемся к анализу переменных ошибок.
Одной из характеристик птеременных ошибок может быть ранг вариаций. В приведенном примере (см. рис. 12) он равен 2400 ярдам (от —1 100 до +1300), т. е. 2187,3 ж. Однако ранг вариаций -не является достаточно удовлетворительной мерой переменных ошибок, так как определяется только двумя величинами — наименьшей и наибольшей. Он может значительно изменяться от одной серии испытаний к другой. Кроме того, ранг вариаций \не отражает распределения частот ошибок. Между тем совершенно ясно, что мера переменных ошибок должна учитывать не только размах колебаний их величины, но и то, насколько часто допускается та или иная ошибка. Поэтому в инженерной психологии для характеристики переменных ошибок предпочитают использовать среднее квадратическое отклонение. Эта величина более стабильна, чем ранг вариаций, и зависит от частоты распределения ошибок. Среднее квадратическое отклонение — это мера дисперсии, рассеяния ошибок вокруг среднего значения
а ^i/ЖЕШ! (9)
где ае — среднее квадратическое отклонение; Me — постоянная, средняя ошибка.;
е — величина каждой отдельной ошибки.
Чем больше рассеяние ошибок, тем больше будет и ое- В шриведенном примере (см. рис. 12) сгс> = 452,9 ярда (около 414 м).
Если мы имеем дело с нормальной кривой распределения (а независимые ошибки обычно так и распределяются), то МОЖ1Н0 достаточно точно предсказать возможное число ошибок, имеющих ту или иную величину. Как следует из статистики, 50 % всех ошибок будет лежать в пределах Ме±0,6745а*; 68,6 — в пределах
64
Ме + ае; 95,4 — в пределах М0 + 2ае\ 99,7 —в пределах
Ме + Эве.
Зная постоянную ошибку и отклонение, характерные для того 'или иного звена системы управления, мы можем определить ожидаемую точность его работы. При вычислении переменной ошибки для всей системы пользуются следующей формулой:
гд,е ае —переменная ошибка системы;
°°а ь п~~" пеРеменная ошибка компонентов системы
а, (, с, .... п ^ ^ ^ ^ ^ ^
Переменные ошибки кумулируются в соответствии с их квадратами. Чтобы показать конкретно, как кумулируются ошибки в системах «человек — машина», приведем шример. Пусть переменная ошибка радиолокатора равна 10 м/ а оператора — 20 м. Тогда по формуле (10) переменная ошибка -всей системы будет равна 22,36 м. Кривые распределения ошибок радиолокатора, оператора и системы «радиолокатор — оператор» представлены на рис. 13.
Если полностью исключить ошибку радиолокатора, то шеременная ошибка системы сократится лишь на 2,36 м. Если сократить ошибку оператора#на те же 10 м, то ошибка системы станет равной 14,49 м, т. е. уменьшится на 7,87 м.
Поскольку относительная доля переменных ошибок компонентов в общей переменной ошибке системы пропорциональна их квадратам, то ясно, что, уменьшая ошибку наименее точного 'компонента, мы достигаем наибольших результатов »в решении задачи повышения точности всей системы.
Надо отметить, что часто наименее точным компонентом в системах управления является оператор, поэтому сокращение его ошибок может быть более эффективным для всей системы, чем сокращение ошибок «машинных звеньев»," имеющих высокую точность. Нет, например, резона превращать какой-либо прибор из точного в «сверхточный», если шкала и циферблат прибора сделаны так, что оператор допускает грубые ошибки при их считывании. Ясно, что в этом случае целесобраз-
5—2286 65
но прежде всего реконструировать шкалу, согласовав ее с характеристиками воспринимающего аппарата человека, и тем самым сократить его ошибки. Определен
 01—1
01—1
-30 -20 40 О W 20 30
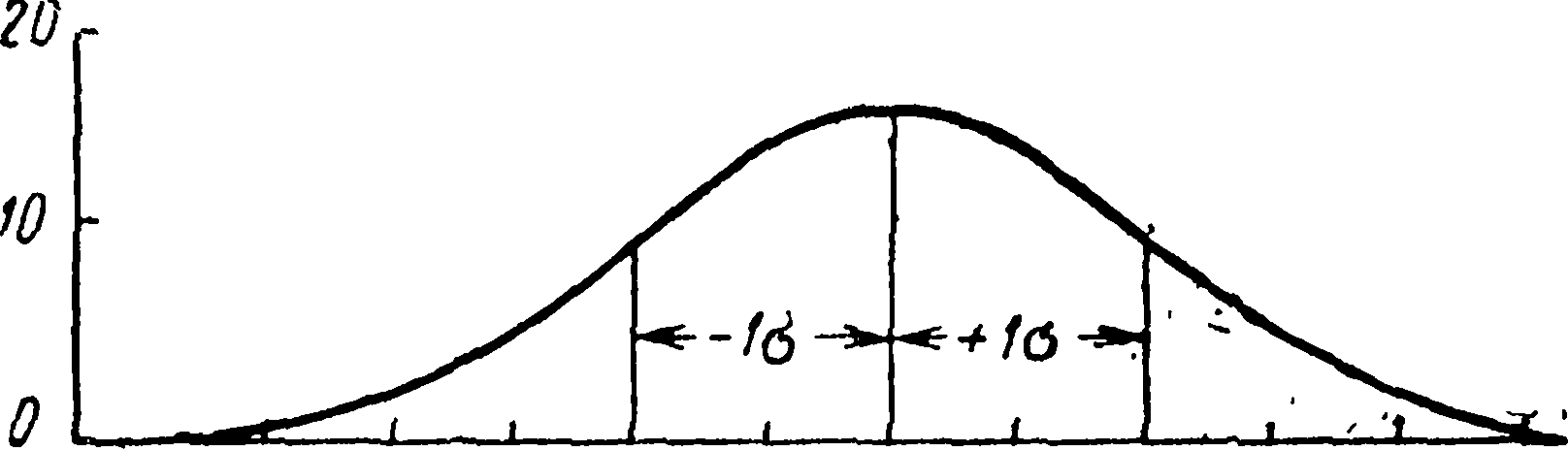
-50-40-30-20-10 0 10 10 30 40 50 6) '
20
г -50
-40 -30 -20 -10 0 10 20 30 40 50 Ранг ошибок,
м 6) Рис.
13. (Кривые распределения ошибок
радиолокатора, оператора и системы
«радиолокатор — оператор» (по А.
Чапанису): а
—
радиолокатор, Ofi-Ю
м.
Число
дат ЛГ—1 000; б —оператор, (Т2=20
м.
Число
дат
N=>1
000;
в —система «радиолокатор—оператор»,
<Тз— V
а? +
<*| -22,36 и.
-50
-40 -30 -20 -10 0 10 20 30 40 50 Ранг ошибок,
м 6) Рис.
13. (Кривые распределения ошибок
радиолокатора, оператора и системы
«радиолокатор — оператор» (по А.
Чапанису): а
—
радиолокатор, Ofi-Ю
м.
Число
дат ЛГ—1 000; б —оператор, (Т2=20
м.
Число
дат
N=>1
000;
в —система «радиолокатор—оператор»,
<Тз— V
а? +
<*| -22,36 и.
ние относительной доли переменных "ошибок компонентов по формуле (11) позволяет находить наиболее эффективный путь повышения точности системы.
Наконец, необходимо несколько слов сказать об аккумуляции постоянных и переменных ошибок, возни-
66
кающих в системе «человек —машина». Здесь обычно применяется формула
где о'е —общая ошибка всей системы;
ае — переменная ошибка всей системы; ЖР —постоянная ошибка всей системы.
Общая ошибка всей системы равна квадратному корню из суммы квадратов постоянной и -переменной ошибок для всей системы.,
Из формул (8), (10) и (И) находим, что
<s=^(<+<+. • .+fj+(M.a+M,b+...+M.ny.
(12)
При определении относительной доли переменных и постоянных ошибок для всей системы действует то же правило, что и при .определении доли переменных ошибок ее компонентов.
Если константная ошибка мала по сравнению с переменной, то ее влияние на общую ошибку невелико. При
M's 1 отношении <С -о- лоля постоянной ошибки в общей
°*5 3
равна всего нескольким процентам.
Но если нам удается тем или иным путем заметно сократить переменные ошибки, то относителыная доля той же самой постоянной ошибки значительно возрастает.
При определении путей совершенствования системы важно установить относительную долю ошибок каждого из двух типов в общей ошибке всей системы. Иногда та* кой дифференцированный анализ позволяет находить сравнительно простые средства повышения точности системы. Так, П. Л. Алджер [337], изучая выбракованные детали, выпускаемые на одном из -предприятий, установил, что почти весь брак (около 15% продукции) возникает в результате нарушения верхней границы допуска (т. е. размеры деталей выше допустимой нормы). Тща-
5* 67
тельно проанализировав целую партию деталей, он установил, что их средняя величина значительно отступает от 'Предполагаемой средней, хотя и находится в пределах допуска (рис. 14,а). Сократив постоянную ошибку (заново настроив автоматы) и не изменяя переменных, он добился сокращения бржа до 2,8% (рис. 14,6).
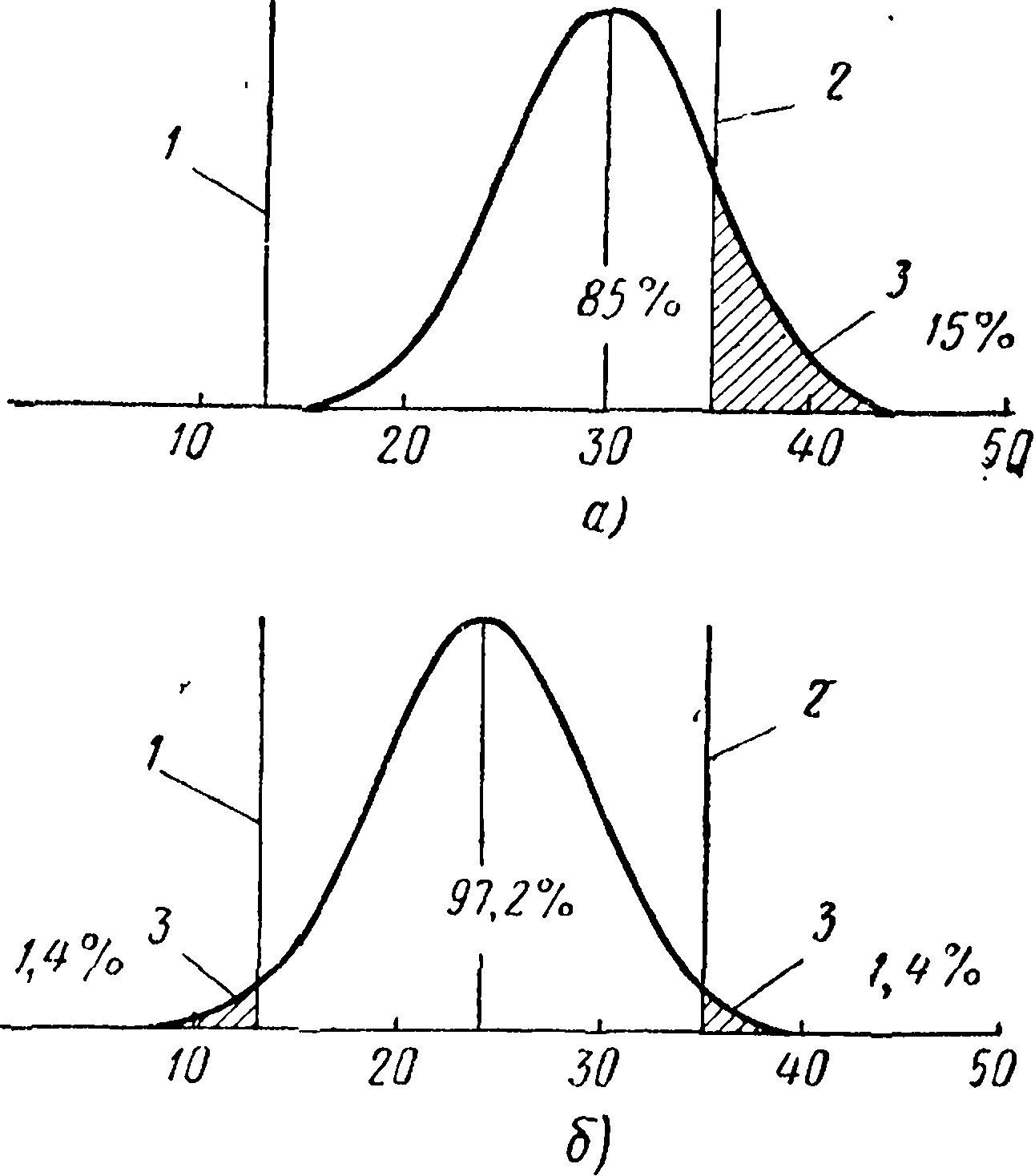
Рис. 14. 'Кривые распределения деталей до и после настройки автоматов (по
П. Л. Ллджеру): а — до настройки автоматов; в — после настройки автоматов. / — нижняя граница допуска; 2—верхняя граница допуска; 3—брак.
Хотя борьба с постоянными ошибками системы более проста, чем с переменными, определить характер ошибок часто бывает довольно трудно. Нередко для этого требуется большой статистический материал. При этом, чем сложнее система, тем труднее дифференцированный анализ ее ошибок.
Как отмечалось, по точности работы оператор уступает «машинным звеньям» системы управления К Если иметь в виду, что относительная доля ошибок компонентов в системе пропорциональна их квадратам,, то важ-
1 Факты показывают, что даже очень опытные'мастера допускают более «ли менее значительные ошибки (Лоуш и Тиффин {427]).
68
лость тщательного изучения ошибок оператора и поисков путей их сокращения (хотя бы частичного) станет очевидной.
При оценке точности работы системы управления прежде всего возникает вопрос о величине возможных ошибок ее компонентов. Обычно включая в систему то или иное устройство, учитывают величину его погрешности. Однако, когда речь заходит о человеке-операторе, на это не обращают внимания, часто полагая, что он может при соответствующей тренировке работать без погрешности. Между тем в экспериментальной психологии накоплено немало данных, показывающих, что, выполняя даже самые элементарные акты, человек допускает ошибки, величина которых может быть измерена. iB этой связи определенный интерес представляют пороговые характеристики психических процессов ('пороги различения, предельный объем симультанного восприятия, агредельный объем оперативной памяти и т. п.), которые частично (приводятся в последующих главах. Они могут лослужить исходной сено-вой для определения 'величины возможной погрешности, допускаемой оператором.
Вообще, следует сказать, что при оценке точности того или иного устройства, с которым взаимодействует человек, необходимо учитывать величину погрешности, допускаемой не только самим устройством, по и человеком. Например, оценивая точность визуального индикатора, нужно измерить 'погрешность, возникающую не только при генерировании сигналов, ней три их восприятии. Иначе говоря, .нужно оценивать погрешность системы «визуальный индикатор — зрительный аппарат». Только .при этом условии полученные данные могут быть использованы для расчета точности всей системы управления.
В отношении возможной достигаемой точности человек значительно уступает существующим техническим устройствам. Он, например, не может многократно воспроизводить одно и то же движение с высокой точностью л о 'показателям времени, силы и амплцтуды (с точностью до миллисекунд, миллиграммов, миллиметров), что в состоянии сделать автомат. Регистрируя движения, выполняемые человеком, мы получим дисперсию значений интересующих нас показателей. При этом
69
границы разброса, т. е. размах колебаний, характеризующий величину (погрешностей, допускаемых человеком, оказываются довольно широкими. Неизбежная колеблемость тех или иных показателей действий человека связана, ло-видимому, с циклическими изменениями функциональных систем организма.
(В затрудненных условиях деятельности (дефицит времени, высокая скорость поступления информации и т. п.) величина погрешности становится большей, т. е. точность снижается (iB. А. Марищук и Н. В. Сысоев [232]).
Обладая сравнительно невысокой (по сравнению с техническими устройствами) потенциальной точностью, человек характеризуется вместе с тем высокой устойчивостью, достигаемой за счет снижения в трудных условиях деятельности относительного порога ошибок. Это было экспериментально показано Г. А. Сергеевым и А. Ф. Романенко, изучавшими деятельность человека в режиме слежения [284]. В их экспериментах наблюдалось, что с увеличением скорости сигнала, прослеживаемого испытуемым, точность сопровождения значительно ухудшается. В этих условиях человек работает <не ino критерию точности (минимум ошибки регулирования), а 'по критерию устойчивости, что обеспечивает высокую надежность в выполнении деятельности.
В целом можно сказать, что при затрудненных условиях точность действия человека уменьшается, однако общая стратегия поведения может сохраняться в течение длительного времени. Человек как бы «жертвует» точностью ради устойчивости.
В тех случаях, когда, несмотря на затрудненные условия, от человека все же требуется высокая точность, возможно возникновение серьезных нарушений деятель-юности, т. е. снижение устойчивости. Так, например, О. П. Козеренко при изучении статической адаптации* наблюдала адаптационно-вегетативный срыв [149]. Здесь возникает явление, аналогичное известному в теории автоматического регулирования: условия устойчивости системы предполагают определенную величину коэффициента усиления, что создает ограничения точности; в результате возникает конфликт между точностью и устойчивостью (требование высокой точности нарушает условия устойчивости).
70
Как следует из сказанного, при определении требований к точности действий человека необходимо учитывать неизбежную колеблемость (и размах колебаний) их параметров. При этом важно иметь в виду, что очень высокие и жесткие требования к точности могут 'повести к нарушению условий устойчивости, а значит, и снижению надежности действия человека. Следовательно, задавая человеку уровень точности, необходимо предусмотреть такие допуски, которые обеспечивали бы длительное сохранение .высокой устойчивости.
Как отмечалось, при оценке погрешности, допускаемой человеком, можно воспользоваться данными экспериментальной психологии о-пороговых характеристиках некоторых .процессов. Однако -важно иметь в виду, что эти данные получены в лабораторных условиях и имеют аналитический характер. Поэтому определение величины ошибок, допускаемых оператором в реальной деятельности, их лимитов, частости и дисперсии требует специальных исследований.
Поскольку любой акт оператора включает ансамбль различных психических (Процессов, выявить источники его ошибок гораздо труднее, чем источники ошибок машины. Одна и та же ошибка оператора может быть вызвана разными причинами. Так, неточность его движения может быть результатом ошибок, возникших или при восприятии сигнала, или при его узнавании, или при его оценке. Она может возникнуть и в момент формирования решения, и в момент воспроизведения тех или иных представлений, необходимых для выполнения операции управления, и т. д. Естественно, что во всех этих случаях средства элиминации ошибок будут различны.
Если иметь в виду, что динамика любого психического процесса зависит от множества факторов, то станет ясно, насколько трудной является задача изучения ошибок оператора.
При современном состоянии инженерной психологии невозможно дать полный перечень всех факторов и условий, влияющих на точность работы оператора. Поэтому мы ограничимся характеристикой лишь самых общих из них.
Прежде всего нужно отметить, что показатели точности действий оператора не являются константными ве-
71
личинами. Они изменяются в зависимости от характеристик сигнала, степени сложности задачи, от условий труда, темпа работы, функционального состояния нервной системы, индивидуальных особенностей оператора, его обучения и ряда других факторов.
В целом, чем ближе характеристики сигнала к пороговым, тем больше ошибок допускает человек в ответ на эти сигналы.
Величина и частота ошибок возрастают с увеличением сложности задачи и темпа работы оператора. В качестве примера приведем результаты одного из исследований, проведенных нашей лабораторией1. Испытуемый должен был выполнять реакции сложного выбора. При этом темп предъявления сигналов в разных сериях эксперимента был различен. В одном случае сигналы появлялись с частотой 75 сигналов в мин, в другом — 95 и в третьем—120. В среднем, при прочих равных условиях (мы отвлекаемся от влияния обучения, утомления и индивидуальных особенностей испытуемых), при темпе 75 сигналов в мин около 25% всех реакций оказались ошибочными. При темпе 95 сигналов количество ошибок возросло до 58%, а при темпе 120 — до 87, т. е. с увеличением темпа возрастает и количество ошибочных реакций. Однако понижение темпа увеличивает точность реакций лишь до некоторого предела. По данным В. В. Чебышевой, О. Л. Копопкипа и некоторых других, при слишком низком темпе работы точность снижается [153, 323].
Очевидно, существует некоторый оптимальный темп работы, обеспечивающий максимальную точность. Его завышение, как и занижение, приводит к возрастанию числа ошибок. Есть основания полагать, что оптимальный темп для разных людей различен.
Количество ошибок сокращается по мере тренировки. Это было подтверждено и в упомянутом исследовании (рис. 15). Имеются также многочисленные данные об изменении точности действий человека при утомлении.
Отсюда следует, что точность работы оператора, а значит, и всей системы управления может быть значи-
1 Исследование проводилось в Ленинградском аэропорту Л. М. Веккером, М. А. Дмитриевой, Н. Г. Левандовским, Т. Б. Лео-шовой, Б. Ф. Ломовым, Р. М. Мансуровым, Е. Н. Сурковым.
72
тельно 'повышена путем соответствующей тренировки его, а также такой организации условий труда, которая обеспечивала бы оптимальный темп работы и минимальную утомляемость.
Эффективным средством повышения точности является также более рациональная конструкция индикацией-

|
90 |
0^ |
|
•о |
70 |
^1 |
|
iT |
|
^с |
|
|
4(1 |
^ |
|
СЪ |
|
|
|
5: > |
50 |
Ч? |
|
^ |
|
1 |
10 |
'2145
Дни опытов
Рис. 15. Изменение точности действия оператора в процессе тренировки: / — процент ошибочных реакций при темпе 75 сигналов в мин; 2 — то же при темпе 95 сигналов в мин\ 3 — то же при темпе 120 сигналов в мин.
ных устройств 'И органов управления (об этом подробнее говорится в гл. 5 и 6).
В том случае, если от системы управления требуется особенно высокая точность, возникает необходимость разработки такой принципиальной и структурной схемы, которая позволила бы максимально снизить вероятность ошибок. Огромный эффект здесь может дать дублирование некоторых компонентов системы.
Эффективность принципа дублирования убедительно показана А. Чапанисом на примере счетной системы RCA Bizmac system [360]. Функция программирования данных, вводимых в эту систему, была возложена на человека, так как ее выполнение требовало большой гибкости (что определялось характером входных данных). Вместе с тем система 'предполагала очень высокую точность, недостижимую для человека даже при большой тренировке. Было выяснено, что при оптимальной конструкции оборудования и рациональной органи-
73
зации режима работы оператор допускал 1—2 ошибочных действия на сотню. Возникшее противоречие между требованиями точности и возможностями человека было разрешено с помощью принципа дублирования. Программирование входных данных осуществлялось двумя операторами независимо друг от друга. Специальное контрольное устройство сравнивало результаты их работы и пропускало только те, которые были полностью идентичны. Таким образом, возникшая ошибка могла пройти iB систему только в том случае, если бы ее допустили оба оператора в одно и то же время К
Вероятность идентичных ошибок, которые могли бы допустить оба оператора в одно и то же время, определяется по формуле
^^[^(Ре^Р'е^)}, (13)
5=1 i=l
где РсТ — вероятность того, что ошибка пройдет в систему; Ре —вероятность того, что оператор А сделает
sl ошибку типа / при выполнении операции S; Р'е —вероятность того, что оператор В сделает si ошибку типа / при выполнении операции S; Ps — доля времени, которая необходима для выполнения операции S.
Предположим, что оба оператора выполняют 10 операций по набору цифровых знаков (каждая операция состоит из набора одного знака). Предположим далее, что ошибочные и точные действия распределяются так, как показано в табл. 2. При этом будем иметь в виду, что 'правильные и ошибочные действия у обоих операторов распределяются одинаково. Например, когда оператор (любой из двух) делает набор «9», вероятность того, что задача будет решена правильно, равна 0,998. В двух случаях из тысячи вместо «9» он набирает «8» (Р = 0,002). Когда оператор делает набор «6», вероятность правильного решения задачи составляет 0,986; в одном случае из тысячи (Р = 0,001) вместо «6» он на-
1 Чапанис определил этот принцип как принцип «подтверждения через независимое удвоение» (the principle of verification through independent duplication).
74
SI
8 w
& °
S о
a ro
0>—tOGJ4^0lO^)OOCO
O© OO О
О О О О О
олооо о© о о о ыоммю
о о© о о о
о о © о о о
о о «р о о о оооо о о о to ел to ел w—
о о о© о о
"о о о © о о
ооооооо
<— СО ел W Сл ГО
оо о ©оо о о о «о о о
О О О 00 О О
о оо© о
о оо ©о
о оооооооооо >— оооооооооо
оооооооооо
оооооооооо оооооооооо
gooooooooo ооооооооо
►^^^ОО^^ОО*.,^*.
оооооооооо о о"— ^-1— "-*-^оо ooooto^^tooooo
оооооооооо
оооооооооо оооооооооо
ОО-'-ЮЮ'-'-оО lOOOOOOtOlOOOOOOtO
ОООООООООО
О ООС
о оос о оос
оо ос
ооооо оо ел to •—о
СО -О ^>— Ю
О О ОО О
1§
ооооо ооооо о ооо о ооооо о ~ to ел с» to»— *. -<i со ►f- too en о
|
о |
|
|
|
|
- |
|
||
|
ю |
|
||
'0 о а •о |
СлЭ |
СО |
||
ъ <х> а а |
4» |
|
|
OV •о Я а |
ся •а о М |
ел |
ся а |
||
Н а о о н |
о |
а а tr |
||
а« |
^1 |
|
||
|
оо |
|
||
|
СО |
|
||
|
Вероятность, что допустит ошибку полнении данной (?Psi или *P>sl) |
оператор при вы-операции |
||
|
Вероятность, что оба оператора допустят ту же самую ошибку (Х/>5, P'si) |
|||
|
Доля времени, которое требуется для данной операции (ps) |
|||
|
Ps(lpSi) или |
ps( |
*p,Si) |
|
|
P's[lpSiP'Si] |
|
|
|
"О
S
р го
о
Б
& о\
о
►я
я
°s
S3
и*
а
£
г*
О й
£ я
бирает «3», ib трех — «4» (Р = 0,003), в .пяти — «5» (Я = 0,005), в трех —«7» (Я=0,003) и в двух —«8» (Я|=О,002). (Вероятности ошибок для каждого из наборов указаны в таблице. В 'среднем из 10 000 .наборов 100 являются ошибочными, т. е. вероятность ошибочного решения задачи составляет 0,01.
Вероятность совершения идентичной ошибки двумя операторами, работающими независимо, находится как сумма произведений ошибок, допускаемых каждым оператором. В нашем случае эта вероятность равна сумме квадратов вероятностей каждой из ошибок.
Так, вероятность идентичной ошибки при наборе «6» равна (0,001)2 + (0,003)2+ (0,005)2 + (0,003)*+ (0,002)2--0,000048.
В целом вероятность идентичных ошибок, допускаемых обоими операторами, равна 0,000308. Если каждый из десяти наборов выполняется одинаковое число раз, то его доля в общем времени деятельности обоих операторов составит 0,1. Отсюда следует, что вероятность одновременных идентичных ошибок равна 0,0000308 (0,000308X0,1). Следовательно, в систему может пройти всего 31 ошибка на миллион наборов. Однако надо иметь в виду, что частота выполнения разных наборов различна. Учитывая это, мы находим, что вероятность ошибочных наборов для каждого оператора* ра<в.на 0,01160. Когда два оператора работают независимо, то вероятность того, что ошибка пройдет в систему, составит 0,00003696.
Итак, 37 ошибок на миллион, если работают независимо два оператора, против одной на сотню (точнее, 116 па 10 000), если работает только один оператор! Эффективность принципа дублирования очевидна.
Велдон и Летерсон подтвердили расчеты Чапаниса экспериментально [496].
Другой способ повышения точности системы состоит в том, что в нее включаются дополнительные контуры, которые обеспечивают подачу информации оператору об эффекте его управляющих действий. Любая замкнутая система дает такую информацию. Однако если она не имеет дополнительных контуров, то оператор 'получает знание лишь о выходе всей системы в целом. В этом случае исправить возникшую ошибку часто бывает невозможно.
76
Включение дополнительных контуров позволяет информировать оператора о результатах управляющих действий прежде, чем они достигнут выхода всей системы, и дает возможность своевременно исправлять возникающие ошибки1.
Принципиальная схема системы управления с дополнительными контурами приведена на рис. 16.
систе мы
А -ж
Выход сиспТемы
I i i
Рис, 16. Схема системы управления с дополнительными контурами: / — индикатор; 2 — оператор; 3 — орган управления; 4 — машина; о — обратная связь; Хи Х2, Л3 — датчики, посылающие сигналы по дополнительным контурам.
Дополнительные контуры особенно выжлы в тех системах, где оператор должен одновременно управлять несколькими параметрами регулируемого объекта.
■В том случае, когда основной функцией человека является контроль (в автоматических системах), особенно важным становится вопрос о конструировании устройств, позволяющих быстро и точно установить место возникшей ошибки. Если учитывать, что на шои-ски ошибочно работающих звеньев у челозека часто уходит очень много времени и что «в процессе шоисков сам человек может допустить ошибку, то важность таких устройств станет очевидной. Эти устройства будут тем эффективнее, чем полнее их -конструкция будет соответствовать возможностям человека.
Итак, точность работы систем управления в значительной степени зависит от ошератора. Пути повышения точности работы оператора многообразны. Эффективными средствами здесь могут быть отбор и обучение операторов, рациональная организация режима и условий
1 По меткому выражению Чапачшса, дополнительные контуры дают возможность оператору «чувствовать движение шлода при беременности» (quickening) [360].
77
труда. Наконец, и это, пожалуй, самое главное, точность системы управления может быть значительно повышена, если при разработке ее (принципиальной и структурной схемы будут четко определены функции человека и если при конструировании системы будет достигнуто согласование особенностей машин с характеристиками чело-века.
Психологически проблема точности работы оператора выступает как проблема формирования адекватного отражения регулируемого объекта и соответственно адекватного действия, направляемого этим отражением. Следовательно, для понимания того, насколько точно способен действовать человек, и для предсказания возможных его ошибок необходимо изучение основных характеристик психических процессов и их роли в регуляции управляющих действий 1.
Надежность. Важность проблемы надежности в решении задач технического прогресса подчеркивается многими авторами (А. И. Берг [17], Кейт Хенни [237] и др.). Акад. А. И. Берг определил ее как «проблему № 1».
Как качественная характеристика, надежность есть способность системы (или ее звена, детали) выполнять требуемые функции в заданный интеровал времени.
В количественном определении надежность есть вероятность того, что система или ее элемент будут выполнять требуемые функции удовлетворительно в течение заданного времени и в заданных условиях. Чцсло, выражающее эту вероятность, называется коэффициентом надежности. Поскольку абсолютно надежных систем не существует, данный коэффициент всегда меньше (пусть даже на очень малую величицу) единицы.
Одним из основных факторов, определяющих надежность системы управления, является степень ее сложности. Считается, что, чем сложнее система, чем большее число компонентов она включает, тем вероятнее ее выход из строя, тем меньше ее коэффициент надежности.
(В случае последовательного соединения компонентов надежность всей системы выступает >как произведение
1 Более подробно проблема точности действий оператора рассматривается в работах Чапаниса (357], Чапаниса, В. Р. Гарнера, С. Т. Моргана [363], а также в нашей статье [204].
78
вероятностей надежной работы каждого из ее компонентов:
Ps = PlP2P3...Pny (14)
где Ps —надежность всей системы; Р\,Ur-мп — надежность каждого компонента.
Однако из этого вовсе не следует, что в любом случае усложнение системы приводит к понижению ее надежности. Как остроумно отмечает акад. Берг, если бы это всегда было так, то люди должны были бы мечтать о возвращении к орудиям каменного века.
Одним из самых простых средств повышения надежности является дублирование наиболее слабых компонентов системы. Надежность работы двух параллельно включенных компонентов равна сумме вероятностей трех благоприятных исходов: 1) ни А, ни Б не выходят из строя, 2) выходит из строя А, да работает Б, 3) выходит из строя Б, но работает А:
Ре = РАРБ + РБ(1~РА) + РА Ц-РБ). (15)
Например, если коэффициент надежности каждого из двух параллельно включенных и дублирующих друг друга компонентов равен 0,8, то Рс=^ (0,8) X (0,8) +0,8(1 — —0,8) +0,8(1—0,8) =0,96. Таким образом, надежность системы оказывается более высокой, чем надежность каждого из ее компонентов. Здесь мы имеем тот же эффект, что 'И в случае применения принципа дублирования для повышения точности работы системы.
'Средствами повышения коэффициента надежности системы являются также включение в нее дополнительных контуров, использование контрольных устройств и т. д.
Короче говоря, надежность системы зависит не только от надежности ее компонентов, но и от характера их связей. В принципе можно создать более надежную систему из менее надежных элементов.
В решении задачи обеспечения необходимой надежности систем управления чрезвычайно важное, если не решающее, значение имеет определение надежности работы ее интегрального, наиболее ответственного звена — человека.
79
Следует отметить, что сбои в работе оператора, вызванные теми или иными причинами, весьма существенно снижают надежность систем управления. Так, по данным Международной организации гражданского воздушного флота (ИКАО) около 50% всех происшествий в авиации происходит <по вине летчика ([66]). Американские исследователи Гродский и Леви установили, что ошибки оператора, допускаемые при обслуживании ракетных систем, составляют от 20 до 53% ненадежности этих систем. Мейстер указывает, что па долю человека приходится 20—30% всех отказов системы (по [26]). Приведенные данные достаточно убедительно (показывают необходимость определения надежности человека-оператора, изучения факторов, которые на нее влияют, и 'поисков средств ее повышения.
Одним из труднейших является 'вопрос о критериях надежности человека. Дело в том, что описание только наличных свойств человека еще не дает нам достаточных оснований для суждений о надежности его работы. Если, например, мы подсчитали, что при выполнении такого-то* действия оператор в течение заданного времени допускает п ошибок, то ш этого еще не следует, что в любых подобных условиях он даст те же (с некоторыми отклонениями) показатели. Оператор может найти новый прием действия, изменить отношение к задаче и т. д., а это существенно повлияет на коэффициент его надежности. Особенно явствен.но недостаточность знания только наличных качеств оператора проявляется в критических условиях. Хорошо известно, что у одних такие условия вызывают растерянность и резко снижают надежность их работы, другие, напротив, начинают действовать более эффективно.
Поэтому поиски критериев надежности оператора предполагают изучение не только наличных, но -и потенциальных качеств человека, анализ его «резервов». При этом надо отметить, что «резервы» не являются величиной постоянной, они изменяются в процессе жизни и деятельности человека.
Трудности усложняются еще и тем, что в реальной трудовой деятельности никогда не бывает 'изолированного проявления какой-либо отдельной психической функции. Значит, мы не можем ограничиваться чисто аналитическими данными, но должны раскрыть дина-
80
ми чес кое взаимодействие ансамбля функций.
Наконец, надо отметить, что лри изучении деятельности оператора чрезвычайно трудно выявить степень устойчивости того или .иного его свойства.
Проблема надежности действий человека изучена в психологии гораздо меньше, чем проблема их скорости и точности. Правильнее было бы сказать: эта проблема почти не изучена1. Мы не знаем, сколько времени оператор может выполнять те или иные действия с заданной точностью, как изменяется его надежность в течение рабочего дня, в каких условиях человек начинает работать не надежно, каковы причины ненадежности и т. д.
Конечно, -в разных конкретных случаях, в зависимости от содержания выполняемой деятельности, от условий и методов работы, надежность оператора будет характеризоваться разными величинами. Несомненно, она не менее, чем скорость и точность реакций, зависит от индивидуальных особенностей оператора, уровня его подготовки и ряда других факторов. Поэтому вряд ли можно рассчитывать на то, что мы когда-либо получим для человека некоторый абсолютный коэффициент надежности, который окажется справедливым для всех условий.
Это, однако, не означает, что невозможно создать единую систему принципов и методов определения надежности работы оператора. Психология и физиология труда располагают некоторыми данными, которые могут быть использованы при определении путей решения этой проблемы2.
Значительный интерес в этой связи представляет все то, что сделано в области изучения работоспособности человека.
1 Это вполне .попятно, так как вопрос о надежности работы человека по существу был поставлен сравнительно недавно в связи с тем значительным изменением роли и места человека в производ ственных процессах, -к которому привел технический прогресс.
2 Прямое отношение к проблеме надежности имеет и все то, что говорилось относительно скорости и точности реакций и действий человека. Стабилизация времени действий, а также стабилизация и увеличение их точности есть вместе с тем средство повышения надежности оператора.
6—2286
81
Многочисленные исследования показывают, что работоспособность не является стабильной характеристикой. Она изменяется в (Процессе труда по определенным фазам (М. И. Виноградов l[54], Е. А. Деревянко [90], К. С. Точилов [307]). В конечном счете ее динамика определяется динамикой изменений рефлекторной деятельности нервной системы человека.
Первая фаза характеризуется нарастающей работоспособностью, •«накоплением рабочих потенциалов». Здесь осуществляется функциональная перестройка и установление динамического стереотипа. В дорабочий период человек или отдыхает, или занимается какой-либо деятельностью (бытовой, спортивной и т. п.). И в том и в другом случае взаимоотношения между психическими (и физиологическими) процессами, так же как и характеристики каждого 'из них, отличаются от тех, которые требуются для работы. Начальный период работы характеризуется известным «начальным рассогласованием» между новыми требованиями к человеку и наличным состоянием его функций. При прочих равных условиях величина этого «рассогласования» определяет длительность вхождения в работу (периода врабатываемости). 'Скорость, а иногда и точность действий человека на первой фазе низки.
Вторая фаза — относительно устойчивой работоспособности— «является тем (периодом, когда установление стереотипа закончено и деятельность организма приобретает гармоническое единство и целостность, обеспеченные стереотипом без существенных потерь в скорости и точности воспроизведения» действий [54, стр. 265]. Для этой фазы характерна «сонастроенность ритмов и темпов» деятельности «отдельных участков нервной системы». Длительность этой фазы зависит от характера работы, а также от уровня подготовки и состояния работника.
Третья фаза — падение работоспособности—обусловлена утомлением. По современным представлениям, «утомление — это не прямой результат растраты потенциалов. .., а выражение изменения функционального состояния центральной нервной системы» [54, стр. 346]. Оно представляет собой закономерную реакцию на работу. В (процессе утомления нарушается гармоническое единство нервной деятельности, изменяется дина-
82
мика и взаимоотношение основных нервных процессов. Особенно значительны изменения торможения, которое становится неустойчивым, расплывчатым и поверхностным. При утомлении наблюдаются изменения биоэлектрической активности мозга: уменьшение ia-рит-ма за счет увеличения |3-ритма, уменьшение (потенциала и периода восстановления a-ритма. Это свидетельствует об образовании районных застойных очагов в коре больших полушарий (М. .Г. Бабаджанян, Е. И. Костина, В. Н.Пушкин [15]).
Переход от второй фазы к третьей характеризуется увеличением вариативности действий (прежде всего по показателям времени их выполнения). Если по характеру трудовых операций человек выполняет стереотипные, регулярно повторяющиеся действия, то наблюдается нарушение регулярности. При этом общая производительность может некоторое время оставаться на уровне второй фазы (К. Ф. М. Маррел [454]).
iB связи с проблемой надежности прежде всего -важно отметить изменения характеристик двигательных реакций человека и его психических функций. Латентный период реакций в фазе утомления значительно увеличивается. 'Снижается точность движений. Иногда возникают парадоксальные реакции: на более сильные раздражители— слабые реакции, на слабые — сильные. Под влиянием утомления особенно сильно страдают сложные навыки. Как показал Ф. Бартлетт [16], в процессе утомления характеристики отдельных движений могут и не изменяться, но их согласование во времени расстраивается. Одни движения утомленный человек делает с излишней торопливостью, другие — с более или менее значительной задержкой. По данным Бартлетта, чаще совершаются не полностью неправильные действия, а правильные, но в несоответствующий момент. Другим выражением нарушений сложных действий является то, что их нерегулярные компоненты (т. е. движения, совершаемые время от времени, через различные интервалы) часто выпадают из структуры навыка.
Интересно отметить, что в том случае, когда оператор имеет возможность контролировать свои действия (например, по приборам или как-либо иначе), его способность работать длительное время с высокой скоростью и минимумом ошибок значительно повышается.
6*
83
Этот факт может быть полезен для инженерно-психологических исследований, так как он указывает на возможность лродления фазы высокой работоспособности путем создания таких условий, которые бы обеспечивали самоконтроль оператора.
Экспериментальные данные показывают, что при утомлении ослабляются сенсорные функции: ухудшается острота слуха, зрения, нарушается нормальный режим движений глаз (неоправданно длительные фиксации, скачки и «блуждание»). Утомление может повести к иллюзиям восприятия. Так, при длительной фиксации красного кружка на сером фоне возникает иллюзия контрастного цвета (фон кажется зеленым).
В процессе утомления ослабляется память, снижается -продуктивность мышления, изменяются также и другие щсихические функции.
Следует, однако, отметить, что изменения различных психических функций не являются синхронными и параллельными. Одни из них изменяются быстрее и более значительно, другие — медленнее и меньше. Имеются данные о том, что показатели некоторых функций в про-цессе работы не только не понижаются, но, напротив, повышаются <(М. И. Виноградов [54], А. Рошка {468]).
Общая закономерность состоит в том, что под влиянием работы показатели функций, активных в данной деятельности, понижаются, а неактивных повышаются. Этой закономерностью объясняется тот факт, что чередование разных видов деятельности (так называемый «активный отдых») является в определенных условиях более мощным фактором восстановления работоспособности, чем полный покой («пассивный отдых»).
Пожалуй, самой общей характеристикой утомления является нарушение внутренней согласованности того ансамбля 'психических процессов, который требуется для выполнения данной трудовой деятельности.
Одним из наиболее важных проявлений изменения согласованности психических процессов и функций (В ходе деятельности является изменение свойств внимания, которое характеризует уровень настройки систем организма, осуществляющих прием и переработку информации.
На первой фазе работоспособности (врабатьгвае-мость) часты отвлечения внимания. Чтобы сосредото-
84
читься, работнику требуется волевое усилие. Для фазы высокой и относительно устойчивой работоспособности характерно так называемое «послепроизвольное внимание».' Здесь частота отвлечений значительно сокращается, и 'вместе с тем сосредоточение не требует специального' усилия. Наконец, в связи с развитием утомления внимание вновь становится неустойчивым, сокращается его объем, затрудняются переключение и распределение.
Надо отметить, что добиться полной устойчивости внимания в течение длительного периода времени даже на второй фазе работоспособности трудно. Более или менее частые отвлечения -неизбежны. Одной из причин их возникновения являются резкие изменения в окружающей обстановке (случайное появление или исчезновение достаточно интенсивного раздражителя, его резкое изменение п т. п.). При этом раздражители, однопорядковые чю модальности с теми, на которые направлено внимание, оказывают более сильное отвлекающее действие, чем разнопорядковые.
Но дело не только во внешних раздражителях. Известно, что взиманию присущи некоторые спонтанные колебания, или так называемая флюктуация, которая обусловлена динамикой нервных процессов и, вероятно, также связана с интеро- и проприоцептивными импульсами. Предполагалось, что флюктуация подчинена определенному ритму. Однако новейшие исследования В. Хме-ляржа, изучавшего активное акустическое внимание, показали, что чередования моментов сосредоточенности и отвлечений аритмичны. Характер спонтанных колебаний (длительность сосредоточения, количество и длительность отвлечений) у разных людей различен. По данным Хмеляржа, минимальное количество отвлечений в течение часа активной сосредоточенной работы равно 54 общей длительностью 1 мин 5,5 сек [368, 369].
Хотя психология и располагает некоторыми данными о динамике колебаний внимания на разных фазах работы, этот вопрос все же изучен недостаточно подробно. Нет полной ясности относительно причин колебаний, не известна зависимость их частоты и длительности от характера выполняемой деятельности и т. д. Между тем знания динамики флюктуации имеют большое значение для решения проблемы надежности оператора,
85
так как известно, что сбои в его работе часто вызываются отвлечениями внимания.
Одной из задач инженерной психологии является поиск принципов такой организации сигналов, которая обеспечивала бы необходимую устойчивость внимания в течение заданного отрезка времени. В этой связи интересна идея К. Л, Леонтьева о машинном управлении вниманием человека [186]. Он предложил использовать электронно-оптические преобразователи звуковой информации в световую для того, чтобы обеспечить комбинированное воздействие сигнала на глаз и ухо человека. По мысли автора, такое комбинированное воздействие должно активизировать механизмы взаимодействия анализаторов и тем самым обеспечить управление непроизвольным вниманием оператора. Однако этог принцип имеет более широкое значение: он может быть применен и в целях повышения устойчивости внимания.
Та'ковы -в общих чертах фазы изменения работоспособности человека К
Важным средством повышения надежности системы «человек—машина» является такая организация режима труда, которая опирается на знание закономерностей работоспособности. В этой связи прежде всего возникают вопросы о чередовании труда и отдыха, о длительности рабочего дня, о распределении нагрузки то часам работы и т. д. К сожалению, в этом отношении труд операторов и диспетчеров изучен еще недостаточно. Но здесь могут быть использованы данные, полученные при изучении других видов труда. В психологии и физиологии уже давно установлено, что эффективность труда повышается, если в течение смены периодически устраиваются короткие перерывы. Их длительность и частота зависят от характера деятельности. Там, где предъявляются высокие требования к вниманию и тонкой координации движений, в работе,
1 Отметим, что основные представления о работоспособности и ее динамике сформировались при изучении главным образом физического труда. Есть основания считать, что общие закономерности справедливы и. в отношении умственного труда. Однако, по-видимому, .в этом случае имеется и специфика динамики работоспособности, изучение которой составляет одну из первоочередных задач психологии труда и инженерной психологии. >В связи с .проблемой надежности человека-оператора особенно важно изучить характеристики сенсорного и умственного утомления.
86
требующей большого нервного напряжения, желательны короткие (3—5 мин), но частые паузы. В работах, предполагающих большую мышечную нагрузку, паузы должны быть длительными (до 10 мин), но менее частыми. При этом их длительность и периодичность должны изменяться на разных фазах работоспособности. Паузы, включенные в трудовой процесс, 'позволяют поддерживать работоспособность на некотором устойчивом оптимальном уровне.
По мнению некоторых исследователей (Маррел), наиболее эффективными являются перерывы, устраиваемые не тогда, когда начинает уменьшаться производительность труда (не в начале третьей фазы), а при появлении (Нерегулярности и увеличении вариативности действий (при переходе от второй фазы к третьей).
В этой же связи ставится вопрос об активизации отдыха (о производственной гимнастике, о смене рабочих мест и т. д.).
Как показал Б. Петц, утомление (в экспериментах Б. Летца—три физической работе) может быть снято не только путем прекращения деятельности или ее смены, iho и частично путем уменьшения нагрузки. По его мнению, переход от большой нагрузки к малой производит по контрасту почти тот же психологический эффект, что и прекращение работы. Физиологически это означает экономное расходование сил, уже мобилизованных в предшествующий период высокой .нагрузки (человек избавляется от необходимости «вхождения» в работу) [459]. Следовательно, одним из средств поддержания работоспособности на высоком уровне может быть попеременное изменение величины нагрузки.
Особенно острая нужда в знаниях динамики работоспособности возникает при разработке режима труда операторов, обслуживающих непрерывные производственные процессы, т. е. в тех случаях, когда временная остановка процесса или неэкономична, или невозможна. Критическим для таких систем является противоречие между непрерывностью управляемого процесса и невозможностью оператора выполнять заданные функции на одном и том же уровне в течение длительного времени. Обычно в этих случаях 'вводится сменность: системы обслуживаются несколькими операторами, заменяющими друг друга через определенные интервалы времени.
87
Непрерывность и требуемый уровень эффективности процесса управления при сменной работе могут быть обеспечены лишь при условии, что время, необходимое для 'передачи функций одним оператором другому, будет согласовано с длительностью периода врабатывае-мости, а длительность смены—-с длительностью фазы устойчивой работоспособности.
Вопросу о сменности работы авиадиспетчеров посвящено исследование И- С. Кидда и Р. Г. Кинкейда [414]. В' экспериментах использовался имитатор радиолокатора, позволяющий отображать одновременно до 30 движущихся объектов. iB тот момент, когда испытуемый, прошедший предварительную тренировку, приступал к выполнению экспериментального задания — начинал «дежурство», ,на «связи» имелось 6 «самолетов», а затем через каждые 60 (±10) мин (появлялось еще по одному. От испытуемого требовалось оценить «воздушную обстановку» и «руководить движением самолетов».
Эксперименты показали, что период врабатываемо-сти в этих условиях равен примерно 5 мин, затем наступает фаза устойчивого уровня работоспособности, которая длится 3,5—4 час.
Перерыв в управлении воздушным движением или снижение его эффективности даже на 5 мин слишком велики, если иметь в виду скорости современных самолетов. Поэтому для повышения эффективности работы авиадиспетчера, а следовательно, и надежности системы управления воздушным движением важно сократить этот перерыв до минимума. Как показали Кидд и Кин-кейд, чтобы обеспечить непрерывность процесса управления, целесообразно в режим работы авиадиспетчеров включить десятиминутный предрабочий период.
В экспериментах авторов сравнивались три варианта деятельности -в предрабочий период: а) авиадиспетчер слушает разговоры своего предшественника с пилотами, б) авиадиспетчер наблюдает за работой предшественника и слушает разговоры; в) авиадиспетчер в течение 6 мин наблюдает и в течение 4 мин параллельно руководит движением. Оказалось, что в первом случае период врабатываемости сокращается на 25%, а в третьем — на 50. Таким образом, чем более активна деятельность в предрабочий период, тем меньше времени требуется диспетчеру для вхождения в работу.
88
Кидд и Кинкейд видят смысл предрабочего периода прежде всего в том, что он позволяет оператору адаптироваться к условиям работы («настраиваются» анализаторы и механизмы внимания, принимается оптимальная поза и т. п.). Но дело, по-видимому, не только в этом. Еще более важным является то, что оператор .в предрабоч'ий период получает возможность оценить •состояние управляемых объектов, сориентироваться в тех путях, по которым шел его предшественник, решая задачи управления, и выделить вновь возникающие еще не решенные задачи. Короче, в этот период осуществляется как бы передача деятельности от одного оператора к другому.
Заканчивая характеристику работоспособности, остановимся еще на одном вопросе. Из практики хорошо известно, что волевое усилие и эмоциональный подъем могут снять на некоторое время отрицательное влияние утомления и продуктивность работы будет* высокой даже на последней фазе (так называемый «конечный порыв»). Объяснение этим фактам надо искать в механизмах регуляции работоспособности. Дело в том, что состояние работоспособности па каждой из отмеченных фаз так или иначе отражается в сознании субъекта (обычно глобально, в форме «общего самочувствия»: бодрости, усталости1 и т. п.). Это субъективное отражение «запаса активности» организма позволяет регулировать и экономно расходовать силы.
Вопрос о роли психических факторов в динамике продуктивности работы специально изучался Е. А. Де-ревянко на примере летной деятельности. Он показал, что «продуктивность работы обусловливается, с одной стороны, максимальными возможностями организма для выполнения данной работы, а с другой — уровнем эмоционально-волевого напряжения, который регулирует степень использования этих максимальных возможностей» [90, стр. 175]2. По мнению Деревянко, в изменениях соотношений между продуктивностью, работоспо-
1 А. А. Ухтомский отмечал, что чувство усталости — очень тон кий «натуральный пред упреди те ль о начинающемся утомлении».
2 Уровень работоспособности и уровень эмоционально-волевого напряжения, конечно, не представляют собой двух независимых и параллельно действующих факторов. Это две стороны единого про цесса.
89
- собностью и эмощшнальнонволевым напряжением можно наметить семь периодов:
1. Период врабатываемости. Здесь увеличивается уровень максимальной работоспособности и обычно нарастает продуктивность.
Период оптимальной работоспособности. Уровни максимальной работоспособности, продуктивности и волевого усилия относительно стабилизированы.
Период «полной компенсации». Возникающее утомление несколько снижает уровень максимальной работоспособности, однако благодаря эмоционально-волевому напряжению продуктивность сохраняется на прежнем уровне.
Период «неустойчивой компенсации». С нарастанием утомления максимальная работоспособность продолжает снижаться. Интенсивность волевого напряжения колеблется. В момент его ослабления продуктивность падает, в момент усиления — возрастает.
«Конечный порыв». Утомление все более нарастает, а максимальный уровень работоспособности па* дает. Однако продуктивность может быть увеличена при значительном волевом усилии,
Период прогрессивного снижения продуктивности. Здесь еще более снижается максимальный уровень работоспособности и падает волевое усилие. Но все же и здесь уровень максимальных возможностей лежит выше уровня продуктивности.
Прекращение работы. Рабочая доминанта угасает; возбуждение сменяется вялостью.
Таким образом, изменение продуктивности работы не является прямым следствием изменений работоспособности. Связь между ними опосредствуется эмоционально-волевыми процессами, регулирующими «расходование рабочего потенциала».
Факты показывают, что человек может научиться сознательно управлять процессом «расходования своих энергетических ресурсов», с большой точностью дозируя усилия в каждый данный момент выполняемой деятельности. Это особенно хорошо известно в психологии спорта,
Одним из путей повышения надежности системы «человек—машина» может служить такая подготовка операторов, которая бы формировала у них умение
90
регулировать работоспособность в зависимости от требований, возникающих на тех или иных этапах работы.
По-видимому, важным моментом процесса регулирования работоспособности является смена способов деятельности, обеспечивающая изменение «нагрузки» на разные психические функции, а тем самым и некоторое уравновешивание «расхода» и «накопления» рабочих потенциалов. Благодаря этому можно добиться стабилизации показателей надежности работы оператора в течение более или менее длительного периода. Отсюда вытекает, что обучение оператора должно проводиться с таким расчетом, чтобы он мог овладеть не каким-либо одним, а несколькими способами выполнения той или иной операции.
Проблема динамики работоспособности человека изучалась в физиологии и психологии на примерах более или менее напряженной активной деятельности, характеризующейся сравнительно высокой нагрузкой.
Сейчас в связи с автоматизацией производственных процессов эта проблема выступает в новом аспекте. Дело в том, что благодаря автоматизации человек освобождается от манипулятивных действий, и его основной задачей все более становится наблюдение. При этом нередко в течение длительного времени (при нормальной работе автоматических устройств) не возникает необходимости его активного вмешательства в ход процесса. Вместе с тем он не должен пропустить критический (например, аварийный) сигнал. Возникает своеобразная ситуация, требующая пассивного, монотонного, по вместе с тем и бдительного наблюдения. Многими исследователями отмечено, что в такой ситуации у оператора развивается состояние, близкое к утомлению, что снижает его бдительность, и в критический момент он может не заметить того или иного важного сигнала, т. е. оказаться ненадежным.
По мнению И. Ф. Макворта, уменьшение бдительности при непрерывном длительном наблюдении (так же, впрочем, как и при монотонной физической работе) является всеобщим законом [439]. Он экспериментально показал, что с увеличением длительности однообразной деятельности возрастают пороги обнаружения сигнала и уменьшается точность слежения. По данным Ж. Леп-ля, в этих условиях увеличивается латентный период
91
реакций, который является степенной функцией от длительности интервалов между значимыми сигналами ('при появлении которых надо активно действовать) [430].
Все эти факты свидетельствуют о снижении работоспособности 'в условиях монотонного наблюдения. Исследователи, изучавшие этот вопрос, приходят к выводу о том, что для поддержания внимания и работоспособности оператора на некотором высоком уровне с увеличением длительности однообразно/'! деятельности должно увеличиваться количество поступающей информации [430, 439].
Сопоставляя дашше, характеризующие работоспособность человека как при перегрузке, так и при недогрузке информацией (см. гл. 8), можно заключить, что существует некоторый оптимум скорости ее 'передачи человеку. Обеспечение этого оптимума является важнейшим условием сохранения устойчивой работоспособности человека-оператора.
На основе изучения работоспособности оператора можно предсказать, как будут изменяться скорость и точность его действий с течением времени работы. Однако для определения надежности этого недостаточно. Более -важно знать, как оператор будет вести себя в условиях, затрудняющих или нарушающих нормальный ход его деятельности. В этой связи возникает вопрос о влиянии помех на оператора и о характеристиках его «помехоустойчивости».
С точки зрения воздействий на оператора помехи могут быть различны. Одни из них постоянны и действуют в течение всего рабочего дня (например, шум), другие случайны (например, внезапный побочный раздражитель). /Помехи различаются по* «диапазону воздействия». Некоторые затрагивают лишь одну какую-либо функцию, т. е. действуют избирательно, другие приводят к нарушению многих функций, дают глобальный эффект. Они различаются также по времени и глубине последействия. Одни помехи вызывают лишь кратковременные сбои деятельности оператора, влияние других может быть более длительным. При этом в зависимости от конкретных условий и от особенностей личности работника одно и то же воздействие может дать различные эффекты.
92
К сожалению, проблема «помехоустойчивости» оператора изучена весьма слабо. Пока еще не существует общепринятого определения помех, взятого по отношению к 'человеку, недостаточно изучены их источники и характер влияния. Поэтому мы лишь очень кратко коснемся некоторых данных о тех воздействиях на оператора и об условиях его деятельности, которые нарушают или затрудняют его работу.
Известный интерес в этой связи представляют исследования влияний шума на человека. Во многих системах управления (самолеты, подводные лодки, электростанции и т. д.) шум, создаваемый машинами, достигает значительной интенсивности. Исследования ряда авторов показывают, что в условиях шума прежде всего страдают слуховые функции. Так, <по Кэмибелу, после воздействия шумом интенсивностью 120 дб в течение часа требуется б час, чтобы вернулась к норме острота слуха, а после четырехчасового шума время восстановления увеличивается до 20 час. Двухминутный шум интенсивностью в 140 дб вызывает потерю слуха па 2 час; полное его восстановление отмечается лишь через сутки. При этом, чем выше частота шума, тем более сказывается его вредное влияние на слух [по 4Г1].
Но действие шума не ограничивается влиянием только на слух. Он вызывает заметные сдвиги ряда физиологических и психических функций. (Воздействие шумом приводит к снижению скорости и точности сеисо-моторных процессов. Особенно страдают сложнокюорди-нированные действия. В ряде исследований изучалось влияние шума на решение интеллектуальных задач. Было установлено, что при этом скорость решения значительно снижается и несколько возрастает число ошибок [по 411].
Как показала 3. Ф. Панайотти, шум оказывает заметное влияние на -внимание человека К В опытах изучалось влияние среднейастотного шума (с интенсивностью 80, 90 и 100 дб) на объем, переключение и распределение внимания. Измерения производились до воздействия шумом, а затем спустя 30, 60 и 120 мин
1 Работой руководила проф. Е. Ц. Апдреева-Галанина при участии автора.
93
после двухчасового воздействия. Результаты измерений представлены на рис. 17.
Наконец, надо отметить эмоциональное воздействие шума. По экспериментальным данным шум вызывает негативные эмоции (досада, раздражение). Особенно неприятны высокочастотные и прерывистые шумы.
А
82
^ 76
^ 70
1
Рис. 17. Влияние шума на концентрацию внимания (по данным 3. Ф. Па-
найотти). Результаты измерения: / — до воздействия шумом; 2 — сразу после* воздействия; 3 — через 30 мин после воздействия; 4 — через 60 мин после воздействия; 5 — через 120 мин после воздействия, а — контроль; интенсивность шума: 60 дб (б); 70 дб (в); 80 дб {г); 90 дб (д); 100 дб (е).
Помехами, аналогичными шуму, являются также вибрация, высокая температура, избыточная или недостаточная освещенность рабочего места и т. д. Они оказывают глобальное воздействие .на организм и 'психику человека, снижая его работоспособность.
Если помехи этого рода являются постоянным компонентом условий труда, то человек постепенно, но лишь в определенных пределах адаптируется, и тем самым преодолевается хотя бы частично их отрицательное влияние.
94
Чтобы определить (помехоустойчивость оператора, важна также изучить его деятельность в сложных условиях, нарушающих установленный стереотип действия (например, в опасных ситуациях). Перед психологией 'возникает чрезвычайно трудная задача — предсказать вероятность безошибочной работы человека при таких нарушениях.
Хорошо известно, что сложная ситуация вызывает более ил'и менее значительные эмоциональные сдвиги. Причем направление этих сдвигов зависит от особенностей личности оператора( уровня мотивации, характера, темперамента и т. д.). Для одних сложная ситуация может стать активизирующим фактором, действующим б направлении мобилизации резервов, для других — фактором дезинтеграции поведения. Этот последний случай уже давно (Привлекает особое внимание психолотов. Рядом авторов 'было 'показано, что эмоциональное напряжение у некоторых людей ведет к потере интегрированных ответов, к возникновению лишних, неподготовленных, ненаправленных и импульсных действий. Появляются персеверации. Сокращается объем внимания, страдают восприятие и мыслительные акты (Э. А. Хаггард [по 411]).
Важным средством предотвращения эмоциональной напряженности может быть создание таких устройств, которые обеспечивали бы оператора в чрезвычайных условиях всей необходимой информацией, (поскольку недостаток информации является одной из основных причин возникновения эмоционального напряжения.
Помехи вроде шума и вибрации, а также сложные условия, вызывающие эмоциональное напряжение, являются внешними по отношению к деятельности оператора. Но существует и такая категория помех, источники которых лежат внутри самой деятельности. В этой связи особый интерес представляет изучение ситуаций, которые требуют от человека одновременного выполнения нескольких действий. Известно, что в этих случаях какое-либо одно действие может оказаться «тормозом» другого, т. е. выступить тю отношению к нему в качестве помехи. При этом, чем ближе по содержанию параллельно выполняемые действия, тем больше возможность их взаимонарушающего влияния. Выполняя одновременно два сходных действия, человек должен
95
производить тонкое различение близких сигналов и непрерывно осуществлять активный выбор. Эти случаи подробно изучались Ф. Д. Горбовым [82]. В экспериментах использовалась таблица, состоящая из 49 черных и красных цифр, расположенных в случайном порядке. Испытуемые должны были непрерывно вести счет черных цифр в возрастающем, а красных в убывающем порядке, чередуя действия, и показывать на таблице соответственно то черную, то красную цифру.
iB этой ситуации у испытуемых возникают состояние озабоченности, персеверации, задержки движений, переживание незавершенности действий, иногда деятельность полностью прекращается. Наблюдаются случаи адаптационно-вегетативного срыва, выражающегося в виде потоотделения, замедления пульса и изменения биотоков мозга (развитии медленных волн). Эффект помехи особенно сильно 'проявляется в те моменты, когда испытуемый читает близкие, но относящиеся к разным действиям цифры.
Подобная 'картина обнаруживается и в тех случаях, когда сигналы, воспринимаемые человеком, сопровождаются дублирующими сигналами ,(эхо-сигналами). Казалось бы, дублирование сигнала, создавая избыточность информации, должно повысить надежность приема. Однако при определенных условиях оно дает противоположный эффект. Это происходит тогда, когда дублирующий сигнал поступает на сенсорный «вход» до того, как завершится прием основного сигнала.
К этому же кругу явлений относится и так называемый эффект Ли, возникающий в том случае, когда человек слышит свою собственную речь с некоторым запаздыванием. При запаздывании на^ '80 мсек человек начинает повторять отдельные звуки и заикаться. С увеличением времени запаздывания до одной секунды возникают повторения отдельных слов, речь становится отрывистой, нарушается ее нормальный темп, возникают длительные паузы и т. д.
Во всех этих случаях дублирующие сигналы нарушают временную структуру процессов приема информации, и поэтому из средства повышения надежности превращаются в помехи.
Вообще нужно отметить, что при определении источников помех, относящихся к деятельности человека, мы
96
сталкиваемся с целым рядом противоречий. Так, целостность и структурность восприятия обеспечивают возможность правильного опознания даже искаженного сигнала, т. е. повышают надежность приема информации. Но в то же время эти качества перцептивного образа могут явиться источником различных иллюзий, т. е. помех. При образовании навыка скорость и точность действии увеличиваются, по прочный и шаблонный навык оказывает отрицательное влияние на формирование новых действий и т. д. То, что в одних условиях повышает помехоустойчивость оператора, в других может оказаться источником помех его деятельности.
Проблема помехоустойчивости системы «человек — машина» не исчерпывается только влиянием помех на деятельность оператора. Инженерную психологию те или иные характеристики человека интересуют лишь по-* стольку, поскольку они сказываются ,на функционировании всей системы. В этой связи проблема «человеческого фактора» в надежности системы выступает в некотором новом аспекте. Из всего сказанного будто бы вытекает, что участие человека в системе управления может лишь снизить ее общую помехоустойчивость. Однако это не так. В определенном отношении человек обеспечивает повышение помехоустойчивости системы. Это прежде всего относится к его способности восстанавливать сигналы, разрушенные .помехами, возникающими в технических устройствах.
Предположим, что определяется надежность системы «знаковое табло — оператор». Нам известно, что вероятность безошибочной работы устройства, генерирующего знаки, равна 0,99, т. е. из 100 знаков 1 оказывается искаженным (разрушенным помехой). Вероятность безошибочного опознания знаков человеком равна 0,98, т. е. в двух случаях из 100 знаки опознаются с ошибкой. Казалось бы, что надежность системы «знаковое табло — оператор» (поскольку здесь имеется последовательное соединение компонентов) будет равна 0,98Х Х0,99 — 0,97 (по 14), однако в действительности коэффициент надежности системы может оказаться равным коэффициенту надежности человека, т. е. большим, чем получается при расчете.
Приведем в этой связи данные, полученные нашим сотрудником Р. М. Мансуровым. В его экспериментах
7—2286 97
испытуемым в случайном порядке предъявлялись цифровые знаки, высвечиваемые па семисегментноп люминесцентной панели. Один из десяти знаков был искаженным (имитация помехи), />3 = 0,9. Испытуемый должен был называть знаки, три этом он знал, что некоторые из них могут быть искажены. Оказалось, что в среднем на сотню всех предъявляемых знаков (включая искаженные) испытуемые ошибочно опознавали только четыре знака; следовательно, коэффициент надежности системы в целом был равен 0,96(Рс = 0,96). Если теперь из формулы (14) найти коэффициент надежности оператора, то он окажется больше единицы:
/ с = / з X ^ и
где Рс — коэффициент надежности системы;
Р3 — коэффициент надежности знакогенерирующего
устройства; Р0 — коэффициент надежности оператора. Отсюда
Л> = ^-=^|§-^ 1,066.
Получается явная нелепость: надежность оператора оказалась больше единицы (!), хотя он и допускал ошибки.
Такой результат получился потому, что мы не учли способности человека восстанавливать информацию, разрушенную помехами. Очевидно, что благодаря этой способности происходит приращение надежности системы «человек — машина», которое следует учитывать при ее расчетах. В формулу (14) необходимо внести дополнение:
/>с = я3ХЛ> + ДЛ (16)
где АР — приращение надежности, обусловленное возможностью человека восстанавливать разрушенные сигналы, т. е. находить и исправлять ошибку, допускаемую техническими устройствами. АР равна произведению вероятности ошибки, возникающей в техническом устройстве, на вероятность ее исправления человеком (АР —
= '(1-/>а)Х/>в).
98
В опытах Р. Л\. Мансурова испытуемые восстанавливали более половины искаженных знаков. При этом надо иметь в виду, что они имели дело со случайной последовательностью. Есть все основания полагать, что если оператор знаком с логикой управляемого процесса и может предвидеть ход его изменений, то вероятность обнаружения и исправления случайных ошибок технического устройства, а следовательно, и приращение надежности всей системы «человек — машина» значительно увеличивается.
Расчет надежности системы, включающей человека в качестве одного из последовательных звеньев, по формуле (14) можно допустить лишь в том случае, если человек ничего не знает ни об управляемом объекте, ни о «машинных звеньях» системы, не имеет никаких сигналов о возникающих ошибках, если ему запрещено думать, расшифровывать сигналы, менять способы действия 'и т. д. Но такие случаи нереальны.
Обычно, 'Принимая участие в работе той пли иной системы управления, человек па основе опыта строит «мысленные модели» управляемых объектов и самой системы, которые позволяют ему корректировать сигналы, поступающие от технических устройств. Изучение харажте-р'исти'к этих моделей, процесса и условий их форМ'Ироеа-ния является одной из важнейших задач, возникающих при оценке надежности систем «человек—машина».
Приведенные данные еще не позволяют достаточно точно установить критерии надежности оператора. Однако О'ни указывают пути их поиска. Для определения коэффициента надежности оператора дальнейшие исследования, по-видимому, должны вестись в двух основных направлениях 1.
С одной стороны, важно измерение времени, в течение которого оператор может безошибочно выполнять
1 Анализируя надежность человека-оператора, важно было бы изучить виды допускаемых им отказов, частоты их возникновения в разные периоды работы, интервалы между отказами, причины отказов, соотношения между надежностью и эффективностью (производительностью) и т. д. В этой связи пелееооГфгкшо рассмотреть возможности использования принципов и математического аппарата, разработанных в теории надежности, для анализа деятельности чсловска-операюра в системах контроля и управления.
7*
99
заданные функции, и изучение распределения ошибок в разные (Периоды рабочего дня. В этом аспекте центральной является проблема работоспособности (более широко — состояний человека).
С другой стороны, необходим анализ особенностей деятельности оператора в условиях помех. Здесь возникает проблема «'помехоустойчивости», которая inредтоблагает изучение гностических (скорость и точность восприятия, быстрота обобщения, способность к экстраполяции и т. д.), волевых (решительность, самообладание, выдержка и т. д.) и эмоциональных (прежде всего эмоциональная устойчивость) качеств человека.
В связи с этим аспектом необходимо также исследование способности человека обнаруживать и исправлять ошибки, возникающие в «машинных звеньях» систем управления.
Указанные направления не являются, однако, изолированными друг от друга. Более того, можно предполагать, что работоспособность и «помехоустойчивость» имеют единое основание и вытекают из одних и тех же или близких свойств нервной деятельности человека.
В этой связи значительный интерес представляет изучение типологических свойств нервной системы. Наиболее глубоко и продуктивно проблема типологических свойств изучается в лаборатории, созданной Б. М. Тепловым [304]. Исследования показали, что основным свойством, обусловливающим возможность длительного "сосредоточения в условиях помех, является сила возбудительного процесса. По данным Л. Б. Ермолаевой-То-миной, у людей со слабой нервной системой отвлекающие раздражители приводят к сокращению скорости восприятия, запоминания и продуктивности подсчетов в уме?-У людей с сильной нервной системой влияние отвлекающих раздражителей бывает даже положительным [ПО].
По данным лаборатории Теплота, параметр «сила — слабость» нервной системы проявляется и в особенностях работоспособности человека.
Это позволяет думать, что работоспособность и «помехоустойчивость» (способность работать концентрированно в условиях побочных отвлекающих раздражите-
100
лей) имеют общее основание в одном из капитальных свойств нервной системы, а именно в ее силе.
В литературе имеются данные, показывающие, что многие психические качества, которые характеризуют «(помехоустойчивость» человека, являются функцией подвижности и уравновешенности нервных процессов. Та.к, Н. Е. Малков выявил зависимость скорости перестройки стереотипа от подвижности нервных процессов [229]. В исследованиях А. А. Макагоповой обнаружено, что особенности распределения внимания связаны с уравновешенностью и подвижностью нервных процессов [227]. И. М. Палей показал, что возможности и способы сдерживать свои реакции связаны с уравновешенностью нервных 'процессов [252]. Имеются утверждения, что основные свойства нервной системы проявляются так или иначе в особенностях всех психических функций и процессов К
Поскольку типологические свойства нервной системы являются относительно стабильными и наиболее общими характеристиками высшей нервной деятельности, их изучение может иметь существенное значение для решения вопроса о надежности работы человека в системах управления. Именно в этой связи и рассматривается некоторыми авторами (В. Д. Небылицыиым [239]) проблема надежшости ошератора. Изучение типологических свойств может быть полезно прежде всего для отбора операторов.
Рассмотренные данные показывают, что надежность (а также и эффективность) человека-оператора является функцией от его состояния, которое в свою очередь зависит от многих факторов: потока поступающей информации, длительности работы, степени сложности ситуации, индивидуальных особенностей оператора, уровня его обучешгости и т. д.2 Раньше отмечалось, что созда-
1 Впрочем, исследователи постоянно отмечают, что природные свойства 'нервной системы не предопределяют фатально психических особенностей человека. На остове одних и тех же свойств могут быть сформированы различные качества личности.
2 В общем смысле под состоянием человека-оператора пони мается характеристика его внутренних возможностей (внутренних «гарантий») успешно решать задачи контроля и управления. Та кая характеристика является многокомпонентной п представляет со бой набор показателей, описывпкнпих мнп/Kiyibo физиологических и психологических параметров,
101
ние такого режима работы, который бы соответствовал общей закошо'мерности изменения работоспособности, может служить одним из средств повышения надежности. Однако в стандартном режиме невозможно учесть все многообразие факторов, влияющих на динамику работоспособности конкретного оператора. Если при этом иметь в виду, что в определенных условиях возникают специфические состояния (например, эмоциональная напряженность, скука и т. п.), то станет очевидной необходимость непрерывного контроля за состояниями человека, особенно в том случае, когда возникает задача обеспечения очень высокой надежности системы «человек— машина».
Этот контроль должен обеспечить обнаружение изменений состояния оператора, прогнозирование дальнейших изменений и соответственно управление условиями работы (например, перераспределение нагрузки между человеком и автоматами в автоматизированной системе управления, регулирование ширины полосы сигналов и скорости передачи информации человеку в зависимости от его состояний и т. п.).
К сожалению, психология пока еще не располагает необходимыми знаниями компонентов тех или иных состояний человека, системы их признаков (с учетом весовых соотношении) и способов точной регистрации.
Пока еще пет и четких критериев оценки состояний.
Однако исследования в этом направлении ведутся, и получаемые результаты, а также достижения в области автоматического распознавания образов позволяют надеяться, что задача контроля за состояниями человека не является неразрешимой. В принципе,-по-видимому, можно ставить вопрос о разработке специальных технических устройств, контролирующих состояния человека и автоматически регулирующих потоки адресованной ему информации, ее распределение между разными анализаторами и т. п. В этой связи возникает также вопрос о выводе на пульт оператора информации о его состоянии в каждый данный момент. Создание соответствующих устройств позволило бы оператору осуществлять объективный контроль за своими состояниями и сознательно изменять поведение для сохранения или изменения этих состояний, Эти устройства могли бы также вы-
102
рабатьжать рекомендации об оптимальных путях произвольной регуляции состояний ' [212].
Включение в систему «человек — машина» подобных устройств в некоторых случаях может стать решающим средством повышения ее надежности. Постановка вопроса об автоматическом контроле за состояниями человека открывает ноизую и весьма увлекательную область исследований, результаты которых могут привести к принципиальному пересмотру многих проблем, возникающих при разработке систем «человек — машина». Подробнее вопрос о контроле за состояниями человека-оператора рассматривается в работе [212].
Приведенные данные, казалось бы, говорят о том, что по надежности человек значительно уступает «машинным звеньям» систем управления. В самом деле, он до-вольно быстро утомляется, скорость и точность его действий изменяются под влиянием огромного числа разнообразных факторов. И тем не менее человек часто включается в систему управления именно для того, чтобы повысить ее надежность. Выше уже говорилось о тех особенностях работы чело-века в системах управления, которые обеспечивают его преимущества перед машинами. Именно они и лежат в основе его вышкой надежности. Человек не окован схемой системы управления. Он способен воспринимать не только то, что поступает к нему от других элементов системы, но и всю окружающую обстановку, способен менять способы действий, леопко преобразовать информацию из одной формы в другую, обладает огромной пластичностью и возможностями компенсации. Поэтому при возникновении неожиданных ситуаций там, где машины выходят из строя, человек способен при определенной подготовке действовать надежно.
Очевидно, для решения проблемы надежности оператора и определения ее критериев недостаточно знать только динамику работоспособности и влияние помех. Необходимо изучить также те способы деятельности, посредством которых оператор осуществляет свои функции
1 Проблема автоматического контроля за состояниями человека-оператора приобретает особенно большое значение при создании систем, предназначенных для работы в специфических условиях (например, пилотируемые космические корабли, подводные лодки с большой глубиной погружения и др.).
103
в системах управления. Здесь мы уже сталкиваемся с проблемой специфики психических процессов и их регулирующей роли в трудовой деятельности человека.
*
Как видно из оказанного, временные характеристики действий человека, их точность и надежность не являются некоторыми постоянными и неизменными величинами. Они зависят от множества факторов и определяются условиями, в которых протекает трудовая деятельность. Для нас прежде всего важно подчеркнуть влияние таких факторов, как свойства сигналов, с помощью которых человеку передается информация, характер решаемых им задам и те особенности органов управления, от которых зависят моторные компоненты действия. Изменяя эти факторы, можно изменять показатели тех или иных физиологических и психических функций (и их ансамблей), участвующих в деятельности человека-оператора.
Как показывают многочисленные экспериментальные исследования, в условиях, определяющих проявление той или иной функции, можно обнаружить несколько критических зон: минимум, максимум и оптимум. Первые две величины соответствуют предельным возможностям функции; их знание необходимо для ответа па вопрос о том, сможет или нет человек выполнять возложенные па пето задачи в условиях, вытекающих из особенностей и назначения системы «человек — машина» и ее отдельных звеньев (например, сможет ли оператор воспринять слабый радиолокационный сигнал, обладающий определенной яркостью, различать шумы, имеющие высокий уровень громкости, и т. д.). Минимум и максимум определяют границы, в которых проявляется данная функция: за пределами этих величин функция либо не проявляется, либо происходит ее нарушение.
Как уже отмечалось (и в последующих главах это будет рассмотрено более подробно), чем ближе характеристики условий деятельности человека к этим границам, тем менее эффективно и надежно он работает.
Наиболее высокая эффективность и надежность деятельности человека проявляется тогда, когда условия
104
являются оптимальными для физиологических и психических функций, включенных в эту деятельность (оптимальная зона условий).
Каковы же признаки оптимальной зоны и как она влияет на рабочее состояние? Этим вопросом в нашей лаборатории занимался Е. П. Ильин, исследуя двигательную систему человека [140]. Отметим, что полученные им выводы мо-гут быть распространены также на системы, посредством которых осуществляются прием и переработка информации.
Коротко перечислим признаки оптимума.
Первым признаком оптимальной зоны является наиболее высокое проявление ф у и к ц и и работающей системы (двигательной, сенсорной и др.), например, наибольшая точность различения, наибольшая скорость реакции и т. п.
Второй признак — длительное сохранение р а б о т о сп о с о б п о с т и системы, т. е. выносливость. При этом имеется в виду функционирование на вышкам уровне. Так, если определяются, например, темпы подачи информации человеку, то можно обнаружить, что- при очень низком, как и при слишком высоком, темпе длительность сохранения работоспособности у человека сравнительно невелика. Но можно найти и такой теми передачи информации человеку, при котором он будет продуктивно работать в течение длительного времени. Именно этот темп является оптимальным для систем, осуществляющих прием и переработку информации.
Третий признак состоит в том, что для оптимальных условий характерен наиболее короткий (по сравнению с другими условиями) период врабатывае-мости, т. е. период перехода системы от состояния покоя к состоянию высокой работоспособности.
Четвертым признаком является наибольшая стабильность проявления функции, т. е. наименьшая вариативность результатов работы системы. Так, человек может наиболее точно по амплитуде или времени многократно воспроизводить то или иное движение при работе в оптимальном темпе. С отступлением от этого темпа вариативность движений возрастает (О. А. Конопкин[154]).
Пятый признак — это адекватность реакций системы внешним воздействиям. Если условия, в которых
105
находится система, являются не оптимальными, то ее реакции могут не соответствовать воздействиям (например, сильный сигнал вызывает слабую, т.е. парадоксальную, реакцию, и наоборот). При оптимальных же условиях система проявляет высокую адаптивность и вместе с тем устойчивость, благодаря чему ее реакции в любой данный момент оказываются адекватными условиям.
Шестой признак заключается в том, что при оптимальных .условиях наблюдается наибольшая согласованность (например, синхронность) в работе компонентов системы.
Конкретные величины, характеризующие признаки оптимальных условий для тех или иных функций, зависят от тренированности оператора, его возрастных, типологических и индивидуальных особенностей. В этой связи перед инженерной психологией возникает вопрос о создании системы эффективных и экономных методов определения оптимальных условий для деятельности человека, решение которого предполагает тесный контакт с другими областями психологии и физиологии. Важным является также выяснение соотношений между величинами, характеризующими минимум, оптимум и максимум.
Попятно, что средства отображения, органы управления и рабочее место оператора в целом должны разрабатываться с таким расчетом, чтобы обеспечить оптимальные условия проявления психических и физиологических функций человека, поскольку именно при этих условиях достигаются наиболее высокая эффективность, точность и надежность его деятельности, а следовательно, и работы всей системы «человек — машина». Таким образом, практическая задача согласования характеристик технических устройств с особенностями человека-оператора, стоящая перед инженерной психологией, выступает и как задача оптимизации условий его деятельности.
2
АНАЛИЗАТОРЫ ЧЕЛОВЕКА (ЧУВСТВУЮЩИЕ ПРИБОРЫ)
Анализатор. Его строение и функции. Одним из пунктов непосредственной связи человека и машины в системах управления является -связь «индикационное устройство — анализатор». Именно здесь осуществляется передача информации от машины к человеку.
Чтобы сигнал, несущий информацию о состоянии управляемого объекта, был .принят человеком, он прежде всего должен быть преобразован в такую физическую форму, которая могла бы быть отражена в человеческих ощущениях.
Поэтому три разработке и конструировании индикаторов первоочередным является вопрос о выборе физического алфавита сигнала. В качестве такого алфавита могут быть использованы оштпческие, акустические и некоторые другие материальные процессы и их свойства. Выбор физического алфавита из ряда возможных определяется тем, насколько каждый из них обеспечивает необходимую полноту описания состояний регулируемого объекта. Поэтому сигналы, несущие информацию человеку, оцениваются в двух взаимосвязанных аспектах. Один из «их — это отношение физического процесса, воплощающего сигнал, к отображаемому событию. В этой связи рассматривается вопрос о том, позволяет ли данный физический процесс или его определенное свойство дать изоморфное отображение события, т. е. другого физического процесса или его свойства, а если позволяет — то насколько полно. Второй аспект — это отношение физического алфавита сигнала к возможностям анализаторов. При этом решается вопрос, какой из анализаторов
107
наиболее целесообразна использовать для приема определенной информации и насколько точно выбранный анализатор может отражать свойства процессов, воплощающих сигналы.
Хорошо известно, что далеко не все процессы, могущие выполнять роль материальных носителей информации, способны при непосредственном воздействии на анализаторы человека вызвать ощущения. Так, па «шкале» электромагнитных волн лишь незначительная часть занята так называемым видимым спектром. Этот спектр находится между границами инфракрасных и ультрафиолетовых лучей и охватывает электромагнитные волны длиной от 380—400 до 750—780 ммк. Зрительные ощущения возникают только при воздействии этих волн. Если иметь в виду, что вся известная современной науке «.шкала» электромагнитных колебаний простирается от 10~13 до 107 см, то ясно, что участок видимого спектра ничтожно мал.
Диапазон звуковых волн, вызывающих слуховые ощущения, также сравнительно невелик. Человек адекватно отражает частоту колебаний волн от 16—20 до 20 000— 22 000 гц. Звуковые волны, частота которых лежит за пределами этого диапазона (инфразвуки и ультразвуки), не вызывают слуховых ощущений. По данным Бекеши, инфразвук с частотой менее 15 гц при достаточной интенсивности вызывает ощущения «прикосновения» или «покалывания в ухе», по не слуховые ощущения. Ультразвуки также могут иногда вызывать неадекватные ощущения. Так, операторы, обслуживающие ультразвуковые сирены, отмечают, что при приближении к сирене у них возникают «холодообжигающие ощущения» в полости рта и носа [411]. Правда, инфразвуки являются адекватными стимулами вибрационной чувствительности, по и она имеет свои границы.
Диапазон воздействий, отражаемых другими анализаторами, также сравнительно невелик и занимает небольшую часть той «естественной шкалы» физических величин, которая используется современной техникой.
Между тем человек получает информацию о многих процессах, которые не вызывают непосредственных ощущений. Это стало возможным благодаря созданию измерительных приборов, как бы «удлиняющих» анализаторы человека. Как отмечает Т. Павлов, в процессе исто-
108
рмчеокого развития формируются системы «орган-{-орудие», обогащающие возможности человеческого познания [251]. Естественнобиологические функции анализаторов плюс «удлиняющие» их орудия формируют новые, свойственные только человеку способы познания объективной действительности. Вместе с тем изменение способов познания оказывает определенное влияние и на естественнобиологические функции анализаторов. Системы «орган + орудие» являются специфическим для человека условием развития чувствующих приборов мозга. Однако эти системы не создают новых и не заменяют естественно сложившихся видов чувствительности. Они лишь превращают одни виды энергии и формы движения материи в другие и тем самым создают чувственно доступные, ощущаемые сигналы о неощущаемых явлениях. Система «индикационное устройство—анализатор» является частным случаем таких систем.
Одним из основных условий эффективности приборов, используемых для передачи информации человеку (в том числе и индикационных устройств), является согласование свойств производимых ими сигналов с характеристиками анализаторов.
Любой анализатор состоит из трех главных частей: 1) рецептора, 2) проводящих нервных путей, 3) -мозгового конца, или центра, в коре больших .полушарий головного мозга.
Основной функцией рецептора является превращение энергии действующего раздражителя в нервный процесс. Условием возникновения нервного процесса является физическое взаимодействие рецептора с предметом-раздражителем. При этом для работы каждого вида рецепторов характерной является такая форма взаимодействия, в которой проявляются определенные свойства вещей, составляющие содержание ощущений соответствующей модальности. Таи<, условием возбуждения тактильных рецепторов является механическое взаимодействие с предметами (трение, давление), т. е. то, в котором проявляются твердость, упругость, пластичность и другие подобные свойства, именно они и отражаются в та'ктильных ощущениях. В нормальных условиях рецепторы глаза возбуждаются тогда, когда па сетчатке возникает оптическое отображение тех свойств предмета, которые проявляются при воздействии па пего лучистой энергии. Эти
109
свойства и составляют содержание зрительных ощущений.
Одной из показательных характеристик реакции рецептора на внешнее воздействие являются изменения его электрической активности. По данньш электрофизиологии изменение потенциалов точно следует за изменением раздражителя, как бы котируя его. Та-к, Дж. Грей показал, что амплитуда п частота электрических пмнуль-со-в, которые возникают в тактильном рецепторе, зависят от величины и скорости перемещения контактирующего с ним раздражителя [402]. Согласованность состояний рецептора со свойствами раздражителя является необходимым условием его правильного отражения, т. е. адекватности ощущения.
Вход рецепторов приспособлен к приему только определенных видов воздействия, по его выход посылает сиппалы, по своей природе единые для любого входа и выхода нервной системы. Это позволяет рассматривать рецепторы как устройства, осуществляющие кодирование информации. Благодаря кодированию воздействия на вход рецептора преобразуются в некоторые универсальные для всей нервной системы сигналы. По своему характеру «нервный код» у высших животных и человека является частотно-импульсным.
Вторая часть анализатора -проводящие пути--осуществляет передачу нервных импульсом через ряд инстанций нервной системы в кору головного мозга.
Мозговой конец анализатора состоит из ядра и рассеянных по коре головного мозга элементов. Ядро, образованное массой нервных клеток, находится в той области коры головного мозга, куда входят проводящие пути от рецепторов. Так, ядро зрительного анализатора расположено в затылочных долях, слухового — в височных, кожпо-механическо'го — в области задней центральной извилины и т. д. Рассеянные элементы каждого анализатора находятся за пределами его ядра, они входят в области, смежные с ядрами других анализаторов. Мозговые концы разных анализаторов переслаиваются (см. рис. 9).
Опытами И. П. Павлова и его сотрудни/ков было установлено, что ядра анализаторов осуществляют самый топкий и высший анализ внешних воздействий. При разрушении ядра зрительного анализатора теряется
110
предметное зрение, т. е. способность различать предметы; пр'и разрушении слухового не различаются сложные сочетания звуков. Однако способность различения света и отдельных звуков в этих случаях не нарушается, что объясняется сохранностью рассеянных элементов [250]. Благодаря рассеянным элементам обеспечивается участие в каждом отдельном ощущении большей части всей коры и образование между анализаторами временных нервных связей, которые лежат в основе ассоциаций ощущений, разных по модальности.
По современным данным, связь между рецепторами и мозговым концом анализаторов является двусторонней. Это было прежде всего установлено в исследованиях деятельности кинестетического анализатора, а затем и других. Двустороппость связей обнаружена во М1П0ГИХ экспериментальных исследовалиях, показавших, что функционирование рецепторов изменяется под влиянием не только внешних воздействий, по также и импульсов, идущих от мозгового конца анализаторов. Это особенно отчетливо выявляется в фактах образования так называемые сенсорных рефлексов. Существование обратных связей подтверждается также гистологическими данными. Волокна, идущие от центра к периферии, были открыты в составе проводящих путей всех анализаторов.
Таким образом, анализатор представляет собой систему, включающую прямые и обратные связи, что обеспечивает его саморегуляцию.
В основе механизма работы анализатора лежит ре- ' флекторпое кольцо. Мозговой кюпеп не является последней инстанцией нервных импульсов, возникающих в рецепторе. Достигнув коры и подвергшись здесь определенной обработке, преобразованные импульсы вновь возвращаются к рецептору. Есть основания полагать, что кольцевой механизм интимно связан с формированием психического изображения (ощущения и восприятия). Благодаря обратной связи в рецепторах, по-видимому, осуществляется воспроизведение того исходного состояния, которое возникает при их взаимодействии с раздражителем. Это воспроизведение, являясь эффектом вну-триапализаторного рефлекса, представляет собой декодирование нервных импульсов, Рецептор выполняет, таким образом, функции не только кодирования, но и де-
111
кодирования, являющегося необходимым условием построения предметного изображения.
Характернейшей особенностью анализаторов человека и высших животных является парность одноименных органов чувств (бирецепция). Вопрос о бирецапции по существу является лишь частью более общей проблемы парной работы -полушарий, впервые 'поставленной Н. Е. Введенским [52]. Введенский обратился к анализу парной работы полушарий в связи с изучением так называемых «психомоторных центров». Значение этой проблемы для теории анализаторов было экспериментально показано И. П. Павловым [250]. Вопрос о роли парности анализаторов в процессе чувственного отражения около двадцати лет изучается Б. Г. Ананьевым и его сотрудниками. Эти исследования обобщены в ряде работ [4—8]. Физиологические и психологические данные показывают, что взаимодействие полушарий — это процесс, в котором фазы иррадиации возбуждения (и торможения) сменяются фазами индукции, и наоборот. При этом смена фаз взаимодействия определяется конкретными условиями деятельности анализаторов.
Парность анализаторов является одним из оснований высокой надежное т и их р а боты. Б л а года р я ей в нормальных условиях восприятия происходит дублирование и взаимный контроль сигналов, поступающих от каждото из парных рецепторов. Можно 'полагать, что взаимодействие полушарий является механизмом сличе-. ния дублированных сигналов. По-видимому, оно служит j средством борьбы с искажениями и потерями информа-; ции, неизбежно возникающими в процессе ее передачи _ по нервным каналам. В затрудненных условиях восприятия или при нарушении одной из сторон анализатора благодаря парности обеспечивается замещение выключенных элементов. Следовательно, в анализаторных системах действует тот же принцип дублирования, который применяется в современной технике для повышения надежности работы машин и который представляет собой по существу не что иное, как моделирование одной из особенностей нёрвно-мозговых механизмов, естественно сложившихся в ходе эволюции.
Однако этим не4 ограничивается значение парности в деятельности анализаторных систем.
Функционирование правой и левой сторон анализа-
112
тора не является полностью идентичным и синхронным. Фактически сигналы дублируются только частично. Во, кроме этого, каждая пара рецепторов принимает и передает в мозговой конец массу нсдублированных сигналов. Благодаря сопряженной работе сторон анализатора «снимается» некоторая новая информация, недоступная каждой из них в отдельности, т. е. повышается «пропускная способность». Это проявляется в увеличении как объема принимаемой информации, так и скорости ее обработки.
Особенно велико значение взаимодействия сторон парных анализаторов в отражении пространства. По существу бирецшция — это специальное приспособление чувствующих аппаратов мозга, служащее для пространственного различения [4].
Важную роль в отражении пространственных свойств предметов играет функциональная асимметрия, которая, как показывают исследования Ананьева и его сотрудников, характерна для всех парных анализаторов. Было обнаружено, что одна из сторон анализатора является в определенном отношении ведущей, доминирующей. Оказалось также, что функциональная асимметрия неоднозначна. Так, глаз, ведущий по остроте зрения, может быть неведущим по прицельной способности или величине поля зрения и т. д. При этом отношения между сторонами анализатора являются динамичными. Так, при малом угле зрения у большинства людей в роли ведущего по прицельной способности выступает правый глаз, по при увеличении угла зрения эта роль переходит к левому глазу. Аналогичная многообразность и динамичность функциональных асимметрий была обнаружена в исследованиях осязания, кожной рецепции, вибраторной рецепции, слуха, обоняния.
Экспериментальные данные показывают, что функциональная асимметрия в работе парных рецепторов имеет условнорефлекторный характер и изменяется в зависимости от пространственных условий ощущения и восприятия. Условнорефлектор'ная природа функциональной асимметрии свидетельствует о неразрывности основных нервных механизмов: механизма анализатора и механизма временных связей. Последний являясь относительно самостоятельным, оказывается в то же время и
8—228G **3
компонентом механизма анализатора. Этим достигается единство анализа и синтеза в процессах чувственного отражения.
Изучение механизмов работы парных анализаторов представляет исключительный интерес для решения задач инженерной психологии. Оно важно для определения оптимальных пространственных признаков сигналов, подаваемых па сенсорный «вход» оператора, и рациона льното размещения органон управления. Знание природы бирецепции необходимо для создания «эффектов пространства» (таких, как стереоскопический и стере офопический эффекты), все более широко применяемых б различных областях современной техники. Наконец, особенно важно подчеркнуть значение изучения механизмов работы парных анализаторов для определения оптимальных способов передачи чел опеку информации, обесточивающих высокую надежность ее приема.
Чувствительность. Основной характеристикой анализатора является чувствительность. Она определяется двумя величинами. Первая из них — это тот отрезок континуума стимулов, воздействие которых вызывает ощущения данной модальности. Как отмечалось, далеко не всякий раздражитель, воздействующий на анализатор, вызывает ощущение. Чтобы оно возникло, интенсивность раздражителя должна достигнуть некоторой определенной величины. Известно также, что с увеличением интенсивности раздражителя наступает момент, когда анализатор перестает работать адекватно. Всякое воздействие, превышающее по интенсивности некоторый предел, вызывает боль и нарушает деятельность анализатора. Интервал от минимальной до максимальной адекватно ощущаемой величины определяет диа/п-азон чувствительности анализатора, или, образно говоря, «размер его шкалы».
Минимальную величину раздражителя, вызывающую едва заметное ощущение, принято называть нижним абсолютным поротом чувствительности, максимальную — верхним абсолютным порогом. По нижнему порогу судят об абсолютной чувствительности анализатора к интенсивности раздражителя. Она выражается величиной, обратно пропорциональной порогу:
Я = -т~, (17)
114
где Е — чувствительность;
/ — ■пороговая величина раздражителя. Другой величиной, характеризующей чувствительность анализаторов, является дифференциальный порог, или порог различения. Он определяется минимальным различием между двумя раздражителями, которое вызывает едва заметное различие ощущений. По экспериментальным данным необходимо определенное соотношение между иптепсивпостями двух раздражителей, чтобы они были отражены в ощущениях как различные. Величина, которую надо прибавить к уже действующему стимулу, чтобы у субъекта возникло ощущение прироста интенсивности, зависит от его исходной величины. Вебср предложил закон, согласно которому отношение прибавки к величине исходного стимула константно
-7-=*:, (is)
где / — величина исходного стимула;
Л/ — величина приращения интенсивности стимула, соответствующая минимальному различению.
Однако в более поздних исследованиях было показано, что этот закон справедлив лишь по отношению к средней части всего континуума стимулов, вызывающих ощущения данной модальности. По мере 'приближения к абсолютным порогам (как нижнему, так и верхнему) это отношение изменяется. Фехнер, Гельмотольц и другие висели уточнение в закон Вебера, позволяющее учитывать те изменения в отношениях прибавки к исходному стимулу, которые происходят в области, близкой к абсолютным порогам. Это уточнение недавно вновь подчеркнуто Дж. А. Миллером [по 406]:
Л/ =*, (19)
/ + /.,
где Д/ — величина приращения интенсивности стимула, соответствующая минимальному различению; / — величина исходного стимула; /г— небольшое прибавление к /. Из сказанного ясно, что зависимость между изменениями интенсивности стимула и вызываемого им ощущения не может быть линейной. Уже ранние поихофизи-
о* 115
ческие исследования показали, что ощущения изменяются гораздо медленнее, чем растет сила раздражителя. Фехнер сформулировал закон, согласно которому при возрастании силы раздражителя в геометрической прогрессии интенсивность ощущения возрастает в арифметической прогрессии:
E = KlgI + C, (20)
где Е — интенсивность ощущения;
/ — интенсивность раздражителя; К и С — константы.
Закон, выраженный в этой формуле, называют основным психофизическим законом. Однако он, как показывают экспериментальные данные, не универсален и имеет лишь приближенное значение. С. С. Стивене и X. Дэвис, исследуя слух, установили, что, хотя зависимость между изменениями интенсивности звука и ощущения громкости и не является линейной, ощущение громкости все же изменяется с ростом интенсивности значительно больше, чем шолагал Фехнер, Гельмогольц и др. [по 406].
Отклонения от основного психофизического закона связаны с изменениями чувствительности анализатора, происходящими под влиянием мшогих факторов, в том числе и 'под влиянием действующего в данный момент раздражителя. Для корректировки отклонений Дж. К. Стивене и С. С. Стивене предложили при определении отношения между интенсивностью раздражителя и величиной ощущения учитывать абсолютный порот чувствительности в данных условиях. По их мнению, этот порог является «физиологическим .нулем», относительно которого нужно оценивать интенсивность действующего раздражителя [481]. На основании большого экспериментального материала, полученного 'При изучении ощущений громкости, яркости, вибрации, тепла и холода, они предложили новую формулу психофизического закона, согласно которой
/ = /<(0-0„)'\ ' (21)
где/ — субъективная величина, т. е. величина ощущения;
116
0 — интенсивность стимула;
0о—абсолютный порог, действующий в данных условиях;
К — константа;
п — показатель степени.
Как известно, значение абсолютного порога изменяется в зависимости от таких факторов, как адаптация и маскировка. Так, «физиологический нуль» (0О) температурной чувствительности возрастает при повторных воздействиях тепла на кожу руки, но падает при воздействиях холода. Под влиянием адаптации меняются также К и п. В экспериментах было 'показано, что при адаптации глаза к темноте показатель степени равен 0,33, но при адаптации к свету он возрастает до 0,45.
Предложенная формула позволяет при определении интенсивности ощущений учитывать не только величину раздражителя, по и функциональное состояние анализатора.
Основной психофизический закон выражает отношение между объективными величинами раздражителя и субъективными величинами, характеризующими ощущения, т. е. между объективными и субъективными переменными. Фехнер впервые попытался представить величину ощущения как функцию от величины раздражителя, и это является его большой заслугой. Однако, соотнося континуум ощущении с континуумом раздражителен (стимулов), он исходил из предположения, что едва заметные различия раздражителей субъективно равны. Но как только что говорилось, последующие работы показали, что это не так. Благодаря многолетним исследованиям С. С. Стивепса, его сотрудников и последователей удалось найти, что психофизические отношения достаточно точно описываются степенной функцией. Это оказалось справедливым для 20 изученных континуумов, и пока не обнаружено ни одного исключения (С. С. Стивене [478, 479], Стивене и Е. X. Галаитер [480], Г. Экмаи [381, 382] и др.). В качестве примера на рис. 18 приведены графики, характеризующие зависимость субъективно ощущаемой яркости световых раздражителей от его интенсивности для восьми длин воли (по Г. Экмаиу [381, 382]).
Стивене разработал методику так насыпаемого прямого шкалирования, заключающуюся кратко в следующем: испытуемому предъ-
117
является некоторый раздражитель, величина которого принимается за 100 (стандартный раздражитель); затем дается серия других раздражителей, величины которых испытуемый должен оценить по отношению к стандарту. Полученная система оценок рассматривается как некоторая субъективная шкала. Соотнося ее с объективными величинами раздражителей, устанавливают вид функциональной зависимости.
Продолжая работы по изучению субъективных шкал, сотрудник Г. Экмана Гоуде показал, что они обладают свойством аддитивности.
627м мк
595
649
672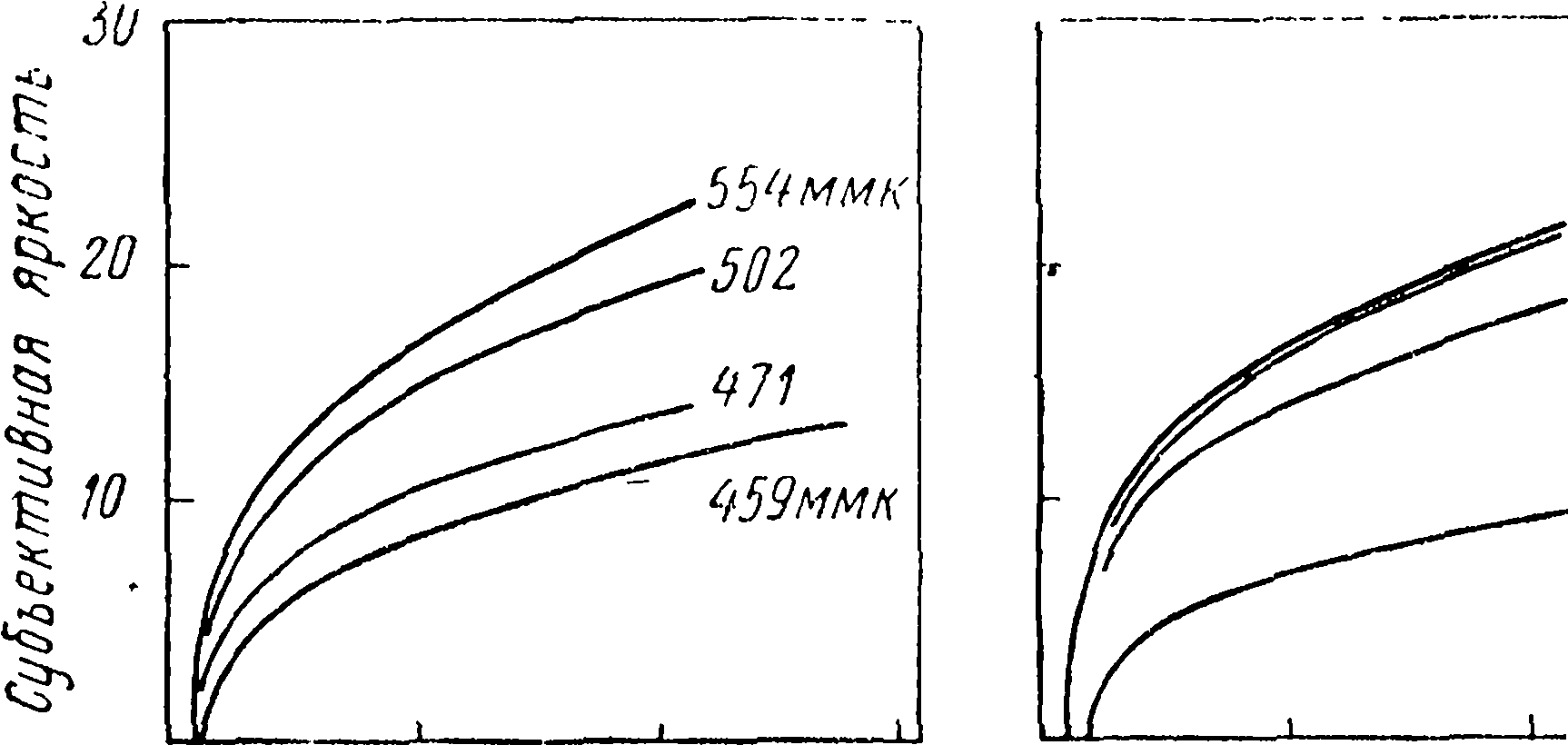
0 5 W 15 0 5 10 15
Интенсивность сбета
Рис. 18. Зависимость субъективной яркости от интенсивности светового раздражителя для волн разной длины (471, 459, 502, 554, 027, 010, 072 ммк) (по Г. Экмапу).
Для понимания психофизических отношений весьма важно четко определить тот закон, которому подчиняется процесс трансформации раздражения в ощущение. Пока в этом направлении делаются лишь первые шаги. Исходя из тогд, что величины реакций рецештора часто находятся в л о г а р и ф м -и ч е с к о и зависимости от интенсивности раздражения, а конечный субъективный результат (ощущение) является его с т спеши ой функцией, Экман предположил, что протсос трансформации раздражения в ощущение может быть описан антилога-риф'мичеокой функцией от реакций рецептора.
По мнению ряда исследователей (Бекеши, С. С. Стивене, Фолькман и др. [по 406]), процесс различения имеет «ювантовый» характер. При постепенном увеличении интенсивности стимула ее приращение ощущается лишь в момент достижения пороговой величины. Изменение интенсивности ощущения является с этой точки зрения
118
п р е р ы в и с т ы м, хотя б>ы стимул и изменялся непрерывно. Различение изменений стимула по своему характеру подобно «операции квантования». Минимальное ощущение различия, соответствующее Д/, выступает в роли своеобразного «кванта», по величине которого можно определить степень приближения динамики ощущения к «кривой» изменения интенсивности раздражителя.
Обычшо дифференциальная чувствительность оценивается 1по величине изменения интенсивности раздражителя, которое происходит за «бесконечно малый интервал времени (мгновенно)». При таком подходе влияние скорости изменения раздражителя на ощущение различия не учитывается. Между тем, как показывают экспериментальные данные, величина дифференциального порога существенно зависит от скорости, с которой происходят изменения интенсивности раздражителя.
Рассматривая зависимость ощущения от раздражителя, изменяющегося во времени, В. Валтер предложил понятие динамического порога дифференциальной чувствительности [493]. По Валтеру, изучавшему различение интенсивности света,
AD, = AS(l + -1^r), (22)
где ДО; — величина динамического порога в данных условиях; Д5 — величина статического порога, которая оценивается по едва ощущаемому различию изменения интенсивности, происходящего за «бесконечно малый интервал времени»; Vi — скорость изменения интенсивности раздражителя в данных условиях; ^о—пороговая скорость изменения интенсивности. Отсюда следует, что при «бесконечно большой скорости» изменения интенсивности раздражителя динамический щорог стремится к статическому. С уменьшением скорости его величина возрастает.
Чтобы вызвать едва заметное ощущение различия интенсивности раздражителя, изменяющегося во времени, величина прибавки должна соответствовать отношению, выраженному в приведенной формуле. Чем медленнее
119
происходят изменения, тем большей должна быть эта величина, и наоборот. В том случае, если величина прибавки меньше динамического порога, человек не ощущает (не различает непосредственно) изменений раздражителя. Он может судить о них лишь на основе сопоставления текущего состояния воспринимаемого раздражителя с образами, сохраняющимися в памяти. Но в этом случае в процесс отражения изменения раздражителя включаются новые механизмы.
Продолжая сравнение анализатора с измерительным прибором, можно сказать, что если абсолютные пороги определяют общую длину «шкалы анализатора», то дифференциальный --величину ее «делений». Абсолютная чувствительность характеризует границы вход,а чувствующих приборов мозга, а различительная — их «разрешающую способность».
Классическая психофизика XIX века связывала представление о порогах и чувствительности органов чувств только с характеристикой интенсивности ощущаемых раздражителей, т. е. судила о порогах лишь .по величине эшергии воздействия, вызывающей ощущение. Позднее возникли понятия пространственного и временного порогов (как абсолютного, так и дифференциального), поскольку эксперименты показали, что возможность возникновения ощущений определяется не только интенсивностью раздражителя, но также ого пространственными особенностями и временем воздействия на анализатор. Временной порог измеряется длительностью воздействия, необходимой для того, чтобы возникло ощущение. Его величина определяется в основном тем временем, которое требуется для приема сигнала и его циркуляции в рефлекторном кольце анализатора.
Пространственный порог определяется по минимальным размерам едва ощущаемого (или различаемого) раздражителя, его расстоянию от рецептора (если речь идет о дистант-анализаторах), положению в сенсорном поле и той площади^рецепторной поверхности, на которую воздействует раздражитель. Более подробные данные о пространственной и временной характеристиках работы разных анализаторов будут приведены позднее. Сейчас мы лишь отметим, что интенсивностные (энергетические), временные и пространственные параметры процессов ощущения выступают в единстве.
120
Пороги дифференциальной чувствительности характеризуют предельные возможности анализаторов (минимум) и поэтому не могут служить непосредственным основанием для расчетов допустимой длины физического алфавита сигналов. Здесь, очевидно, нужно пользоваться величинами, характеризующими не минимальную, а 'некоторую оптимальную различимость сигналов.
В этой связи в инженерной психологии вводится понятие «оперативный порог» (М. А. Дмитриева [96, 97], Б. Ф. Ломов [202, 205, 207, 435], Медведев В. И. [233]). В многочисленных экспериментальных исследованиях установлено, что с увеличением дивергенции (интервала различия) какого-либо ощущаемого признака сигналов скорость и точность различения возрастают. Та наименьшая величина дивергенции, при достижении которой скорость и точность различения достигают максимального значения, определяется как «оперативный порог», или, точнее, «порог оптимального различения».
В качестве примера приведем данные М. А. Дмитриевой, изучавшей зависимость скорости переработки информации человеком от величины различия между парами линий по длине. Испытуемым в случайном порядке предъявлялась пара линий, как равных, так и различных по длине; при этом интервал различия изменялся от пороговой величины до величины, превышающей пороговую в 30 раз. Если испытуемый считал линии равными, то нажимал одну кнопку, если неравными — то другую. Регистрировалось время реакций и оценивалась скорость переработки информации, которая является интегральным показателем, так как объединяет в одной величине и скорость, и точность ответов, а следовательно, и различения.
Полученные экспериментальные данные приведены на рис. 19. Они показывают, что вначале с увеличением интервала различия скорость переработки информации возрастает, но лишь до некоторого уровня. При достижении величины интервала, превышающей различие, соответствующее дифференциальному порогу в 10—12 раз, ее дальнейшее увеличение уже не даст прироста скорости переработки информации. Это и есть величина порога оперативного различения.
121
Аналогичные данные были получены С. И, Бутовой и М. А. Дмитриевой при изучении различения размеров простых геометрических фигур (круга, треугольника, ромба).
Получены также данные, характеризующие «лорош оптимального различения» скорости движущихся меток (Водлозеров В. М. [56]), яркости световых стимулов
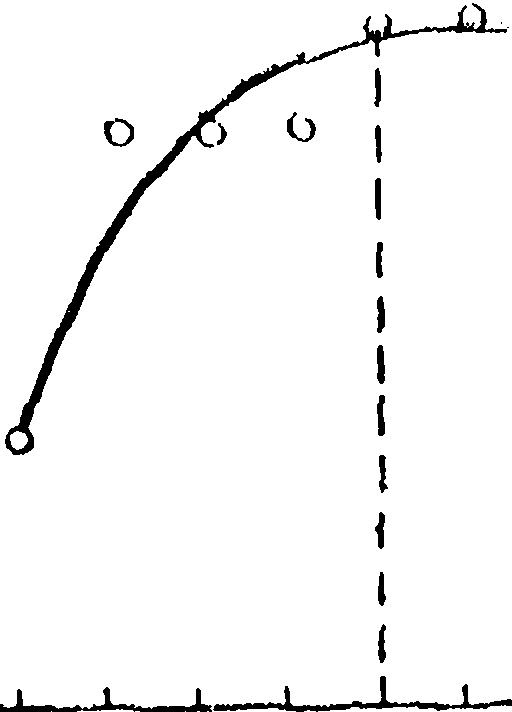
5|^
^ О
^fr^trry,
16 го
28
Величина различия, S^^j
Рис. 19. Зависимость скорости переработки информации от величины различия между линиями (по М. Л. Дмитриевой).
где п — интервал различия признака, i—величина различия, соответствующая дифференциальному порогу. Точки а — величина «оператиппого порога».
(Чуприкова Н. И. [326]) и некоторых других признаков одномерных визуальных сигналов.
Ближайшей задачей работ, ведущихся в этом направлении, является измерение порогов оптимального различения для многомерных стимулов.
Как отмечалось выше, анализатор является самонастраивающейся системой. Один из важнейших моментов настройки — это адаптация, т. е. регуляция диапазона чувствительности в соответствии с условиями деятельности анализатора. Как известно, рецепторы получают на вход раздражения, интенсивность которых может изменяться па несколько порядков (примерно в К)10 раз). На выходе же нервных волокон может воспроизводить-
122
ся только до 28 ступеней интенсивности. Между тем анализатор в состоянии различать число ступеней, превосходящее указанную величину во миого раз. Эти противоречия были бы непонятны, если бы чувствительность анализатора являлась неизменной. Однако механизмы настройки изменяют чувствительность, обеспечивая ее приспособление к конкретным условиям. Благодаря адаптации самая крутая часть характеристики чувствительного э'лемqhта попадает каждый раз именно в область действующей интенсивности раздражителя (О. Ранке [269]). Адаптация чувствительных приборов осуществляется рефлектор но, по принципу обратной связи. В основе ее механизма лежит сложная система рефлексов (Е. Н. Соколов [293]).
Адаптация характеризуется величиной изменения (повышения или понижения) чувствительности и временем, и течение которого оно осуществляется. Для раз-пых анализаторов эти показатели различны.
Наиболее значительна величина адаптации в зрительном анализаторе. Чувствительность глаза может измениться примерно в 2ХЮ8 раз. Время адаптации занимает несколько десятков минут. Так, при темповой адаптации [ чувствительность достигает некоторого оптимального уровня на 30—40-й минуте. Кривая адаптации глаза приведена на рис. 20. Как видно, вначале чувствительность возрастает быстро, примерно на 10-й минуте отмечается замедление адаптации; затем — вновь быстрый рост чувствительности, который постепенно становится все более медленным. Временная задержка адаптации обусловлена перестройкой механизма зрения: переключением от дневного (кол б очкового-) зрения к сумеречному (палочковому).
Исследования П. О. Макарова показали, что в процессе адаптации изменяются не только интенсивностный, но также временной и пространственный пороги. При этом общий характер «кривых» адаптации по всем трем показателям одинаков, по тонкая динамика изменений чувствительности по каждому из них различна [228].
1 В зрении различают две формы адаптации: темповую, которая происходит при переходе от света к темноте и заключается в повышении чувствительности зрительного аппарата, и световую, которая наблюдается при переход0 от темноты к свету и состоит в понижении чувствительности.
123
Настройка анализатора не сводится к адаптации. Существенное место в ней принадлежит межанализаторным связям (см. стр. 157—162).
Важную роль в настройке анализатора играет также его проприомускулярный аппарат. Изменяя положение рецептора относительно раздражителя, этот аппарат тем самым изменяет и эффективность действия раздра-
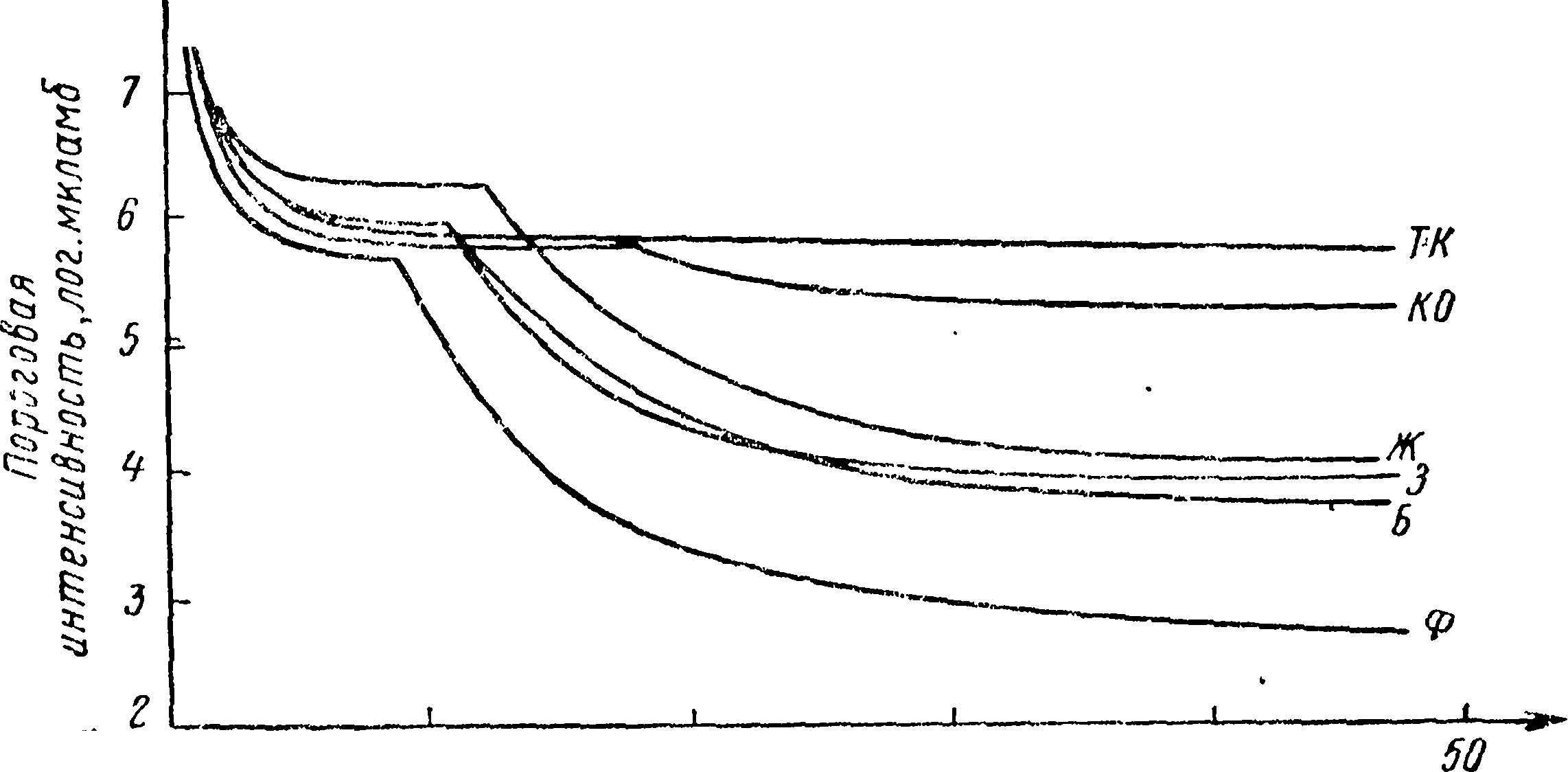
О 10 20 30 40
В рем л пребывания в темногпигмин
Рис. 20. Семейство кривых, характеризующих темповую адаптацию глаза (по А. Чапанису): ТК — адаптация к темно-красному цвету; КО — к красно-оранжевому; Ж — к желтому; 3 — к зеленому; Б — к белому; Ф — к фиолетовом у.
■ жителя. Так, известно, что разные участки сетчатки обладают разной чувствительностью. В процессе рассматривания какого-либо объекта глаз поворачивается таким образом, чтобы проекция объекта попадала на наиболее чувствительную часть. Этим создаются оптимальные условия различения. Ту же функцию выполняют не только движения воспринимающего аппарата, но и общие движения организма (поворот головы и тела в сторону раздражителя).
Перечисленные механизмы настройки анализатора обеспечивают избирательность в приеме сигналов К Благодаря их действию воспринимающая система каждый
1 Отметим, что п л стройка по, исчерпывается только механизмами адаптации, взаимодействия анализаторов и работой проприомуску-лярного аппарата, но они играют основную роль. Подробный анализ механизмов настройки дается в работе Е. Н, Соколова [2931,
124
раз «выбирает» такую «.полосу пропускания», которая является оптимальной в данных условиях по отношению к данным раздражителям. Таким образом, чувствительность анализатора выступает как динамическая характеристика; ее диапазон изменяется с изменением действующего раздражителя.
Избирательность, являясь условием формирования адекватных ощущений, вместе с тем выступает как средство борьбы с помехами, т. е. обеспечивает высокую помехоустойчивость анализатора. Это можно продемонстрировать на примере световой адаптации глаза. Каждому хорошо известно, что при выходе из темной комнаты на улицу, освещенную солнцем, человек в первый момент ничего не видит, кроме залитого светом пространства. Яркий солнечный свет выступает как помеха, «забивающая» все другие сигналы. Но благодаря адаптации чувствительность глаза приходит в соответствие с интенсивностью света, отбрасываемого окружающими предметами, которые становятся видимыми. Здесь адаптация обеспечивает амплитудную избирательность.
Работой проприомускулярного аппарата создается п ростр а нет:в ен н а я избирательность, которая также является средством борьбы с помехами. Благодаря движению рецепторного звена анализатора воспринимаемый объект попадает в зону наиболее ясного различения, что обеспечивает выделение его из окружающего фона. Фоновые же сигналы, которые могут быть помехой, попадают в зону грубого различения и, таким образом, как бы «срезаются». Если бы, например, глаз в каждый момент одинаково четко видел и объект восприятия и фон, то различение было бы затруднено, так как второстепенные сигналы (от фона) могли бы «забить» основные (от объекта).
Средством повышения помехоустойчивости анализатора является также дублирование сигналов, обеспечивающее вероятностную избирательность. Важная роль здесь принадлежит движениям воспринимающих аппаратов и бирецешции.
Как средство повышения помехоустойчивости в работе анализаторов используется также и временная избирательность. В стереотипных условиях, благодаря образованию рефлексов на время, ход изменений чувствительности становится также стереотипным: она новы-
125
шаетси к моменту действия или изменения сигнальных раздражителей и падает в интервалах между ними. Примером этого могут служить суточные колебания чувствительности зрительного аипарата. Таким путем создаются в нужный мо;мент оптимальные условия для приема сигналов и ослабляется действие помех.
Способы повышения помехоустойчивости, сложившиеся в ходе эволюции, выступают в неразрывном единстве. Они являются одним ив оснований высокой надежности работы анализаторов.
Из приведенного описания устройства и характеристик анализаторов вытекают некоторые общие требования к оформлению сигналов, адресованных человеку в системах управления.
Каково бы ни было качество сигнала (раздражителя), совершенно ясно, что он будет воспринят только в том случае, если его интенсивность превышает нижний порог абсолютной чувствительности. Но, как отмечалось, диапазон чувствительности анализатора достаточно велик, и его отдельные участки (от нижней границы до верхней) имеют значительные различия. Надо также иметь в виду, что очень сильные раздражители нарушают работу анализаторов, приводят к значительным искажениям в приеме сигналов. Поэтому при выборе интенсивности следует ориентироваться на «средний участок шкалы анализатора», па наиболее крутую часть его характеристик, так как именно она является оптимальной.
Кроме того, оператор часто должен следить за изменениями сигналов, сравнивать их между собой по интенсивности, длительности и т. д. Исходным (хотя и не единственным) условием решения этих задач является такая разница между сигналами пли ступенями их изменения, которая превышает величину дифференциального /порога. Здесь возникает необходимость учета «разрешающей способности» анализаторов. С первого взгляда может показаться, что чем больше разница между раздражителями, тем лучше. Однако, как мы видели выше, нет необходимости увеличивать интервал различия между стимулами более, чем до величины, соответствующей порогу оптимального различения,
Важно также иметь в виду, что при чрезмерной разнице (например, при чрезмерном перепаде оовещелно-
126
сти) работа анализатора затрудняется, так ка>к сильный сигнал может подавить слабый. Кроме того, в этом случае может возникнуть необходимость перенастройки анализатора. Например, при переносе взгляда с ярко-освещенной поверхности па тусклую или наоборот требуется время для адаптации глаза. Если переносы происходят часто, то развивается утомление. При резких перепадах интенсивности сигналов ошейка величины различия между ними также затруднена. Из всего этого вытекает необходимость в каждом конкретном случае находить не только «оптимальный порог», но и ту оптимальную зону, в которой различение сигналов осуществляется с наибольшей точностью и скоростью. Сказанное относится не только к интенсивности, но также к размерам и длительности сигналов.
При определении общей длины физического алфавита сигналов, с которыми должен работать оператор, важно определить общее число различаемых состояний сигнала и возможности их относительной оценки. Например, если в качестве физического алфавита используется интенсивность света, то нужно определить, сколько градаций интенсивности различает человек и при каких условиях он считает, что данная интенсивность больше другой во столько-то раз. Как отмечалось, субъективные переменные подчиняются не линейной, а степенной зависимости от объективных. Это значит, что если один сигнал объективно больше другого, например, в два раза, то субъективно это отношение является иным. При разработке физического алфавита сигналов необходимо основываться па тех данных, которые накоплены в современной психофизике по вопросу о зависимости субъективных переменных от объектив-пых.
Особый интерес представляет вопрос о пространственном расположении индикаторов относительно органов чувств. Необходимость постановки такого вопроса вытекает уже из того факта, что разные участки рецоп-торной поверхности анализатора обладают разной чувствительностью. Очевидно, наиболее важные и ответственные сигналы должны находиться в тех зонах сенсорного поля, которые соответствуют участкам с наиболее высокой чувствительностью. В этой связи важно учитывать также особенности бирсцопцшг
127
При оформлении индикационных устройств и организации общих условий деятельности оператора необходимо иметь в виду динамику изменений чувствительности анализатора в процессе работы. Так, если по ходу деятельности требуется темповая (или световая) адаптация глаза, то сигнал должен подаваться с учетом ее величины и длительности.
Наконец, организация сенсорного поля оператора должна обеспечить условия для амплитудной, вероятностной, временной и пространственной избирательности в работе анализаторов.
Другой круг вопросов, возникающих при конструировании индикационных устройств, касается выбора качества сигнала, а следовательно, и модальности! анализатора. В этой связи необходимо остановиться на характеристиках основных видов чувствительности человека. Данные об интенсивностных, временных и пространственных порогах различных анализаторов могут быть полезны при выборе процессов, несущих информацию человеку, их модулируемых параметров и типа модуляции 1.
Зрение. Зрительная система представляет собой комплекс ряда чувствительных и настроечных аппаратов, согласованная работа которых необходима для адекватного отражения оптических стимулов. Основой этой системы являются собственно оптический анализатор, обладающий чувствительностью к лучистой энергии, и оку-ломоторный аппарат, обеспечивающий перемещение глаза. В свою очередь перемещение глаза порождает кинестетические (двигательные) ощущения, которые играют весьма важную роль в зрительном восприятии пространства.
Периферическая часть собственно оптического анализатора (сетчатка) включает два типа рецепторов: так называемые палочки и колбочки. Первые являются аппаратом ахроматического зрения, вторые — хроматического.
1 В данной работе мы вынуждены ограничиться лишь самыми общими характеристиками системы анализаторов человека. Более подробные сведения имеются в работах Б. Г, Ананьева [4—7], Е. Ц. Андреевюй-Галанииой [9J, А. И. Бронштейна [34], С. М. Дио-■носова [94], Г. X. Кекчеева {146], С. В. Кравкова [1G0—161], С. Н. Ржевкииа [272], В. Н. Черниговского [324], С X. Бартли, X. Дэвиса, С. Пфаффмана, В. Л. Дженкинса, Г. Р. Вендта [406], С. С. Стивенса [478, 479] и др.
128
Абсолютная чувствительность зрения весьма высока. Так, по данным С. И. Вавилова, в условиях тем новой адаптации световые ощущения вызываются лучистой энергией, равной всего нескольким квантам [41].
Общая длина «шкалы» чувствительности оптического анализатора -представлена на рис. 21.
ш {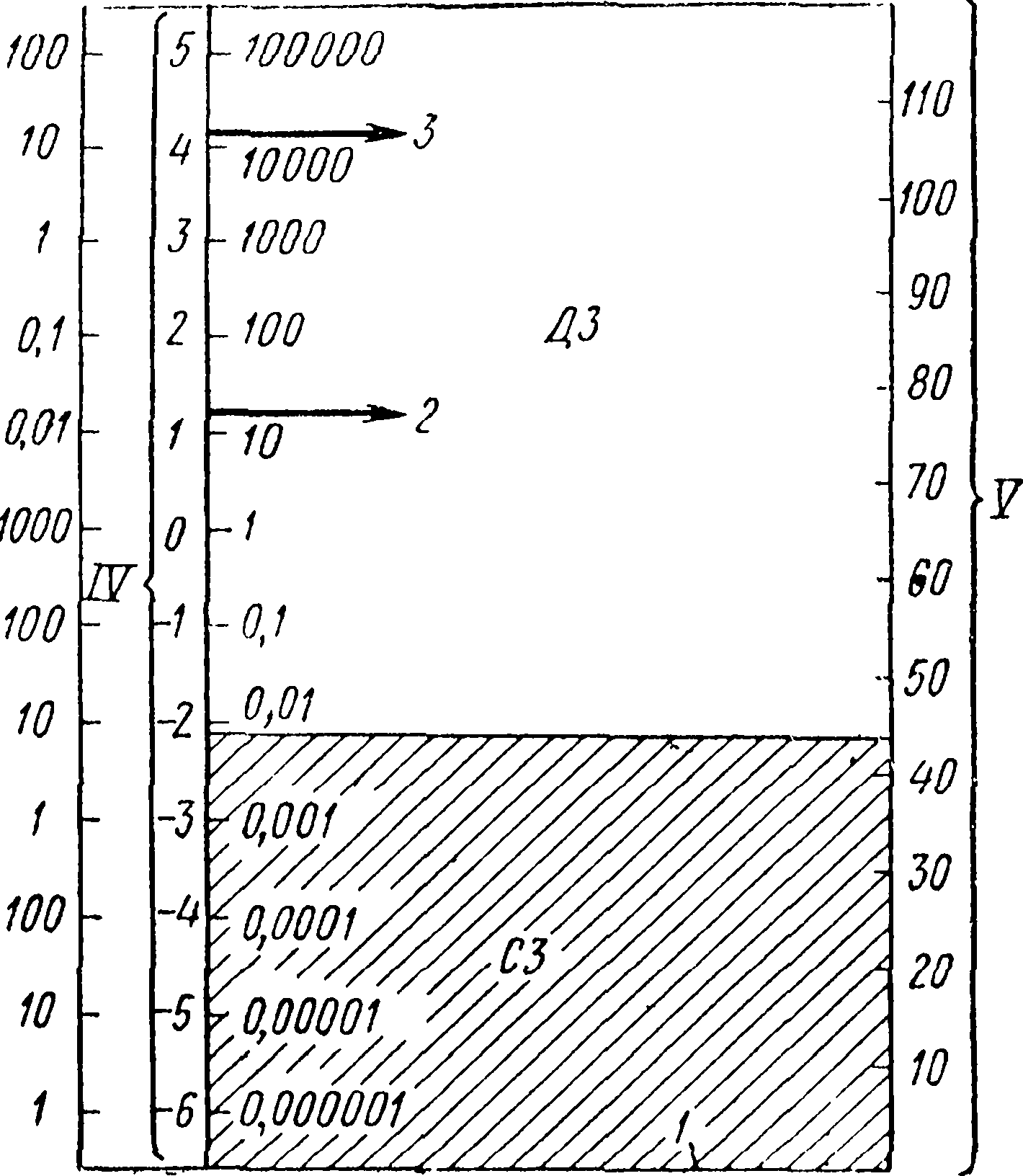
(по Бартли): ДЗ — дневное зрение (колбочки); СЗ — сумеречное зрение (палочки); / — нижний абсолютный порог; 2 — белая бумага при хорошем (для чтения) освещении; 3 — верхний абсолютный порог. Интенсивность: / — в ммкламб; II — в мкламб; III — в ламб; IV—в лог. мламб; V — в Об выше порога, / лажб = 0,3183 стильба, 0,3183 • К)-2 св/кв.мм.
Дифференциальный порог чувствительности в среднем равен 0,01 исходной интенсивности стимула. В действительности, однако, он не является постоянной величиной. С увеличением интенсивности исходного стимула дифференциальный порог уменьшается. Его величина зависит также от длины волны. В целом, при прочих равных условиях, чем длиннее волна, тем выше разностный порог (рис. 22).
9—2286
129
-г ~1 о 1 г з « интенсивность исходного стимула, 1
Рис. 22. Зависимость дифференциального порога от интенсивности исходного стимула (в логарифмических единицах) ,(по Гехту).
О сновной
характеристикой хроматического, кол
боч
кового,
зрения является чувствительность к
длине свето
вых
волн. При равенстве энергии воздействующих
волн
различия
их длин ощущаются как различия в цвете
ис
точников
света или по
верхностей
предметов,
которые
его отражают.
Глаз различает
семь
основных
цветов и бо
лее
сотни их оттенков
(ступеней
цветности).
С
изменением длины
►волны
извеняется и ка
чество
ощущений. Дли
нам
волн от 380 до
455
ммк
соответствует
ощущение
фиолетового
цвета, от 455 до
470—
синего,
от 470 до 500—
голубого,
от 500 до
540— зеленого, от 540
до 590—
желтого, от
590
до 610—оранжево
го,
от 610 до 780—
красного.
Указанные
границы являются
сновной
характеристикой хроматического, кол
боч
кового,
зрения является чувствительность к
длине свето
вых
волн. При равенстве энергии воздействующих
волн
различия
их длин ощущаются как различия в цвете
ис
точников
света или по
верхностей
предметов,
которые
его отражают.
Глаз различает
семь
основных
цветов и бо
лее
сотни их оттенков
(ступеней
цветности).
С
изменением длины
►волны
извеняется и ка
чество
ощущений. Дли
нам
волн от 380 до
455
ммк
соответствует
ощущение
фиолетового
цвета, от 455 до
470—
синего,
от 470 до 500—
голубого,
от 500 до
540— зеленого, от 540
до 590—
желтого, от
590
до 610—оранжево
го,
от 610 до 780—
красного.
Указанные
границы являются
лишь лриблизительны-мы. В действительности 'переход от цвета к цвету плавный. Обычно считается, что цветовые ощущения вызываются воздействием световых волн, имеющих длину в интервале от 380 до 780 мм. Однако согласно новейшим данным этот интервал (диапазон обнаружения цветовых сигналов) охватывает длины волн от 300 до 1050 ммк [412].
С уменьшением интенсивности источника света относительно некоторой оптимальной величины цветовой тон становится все менее и менее выраженным и при очень малой интенсивности теряется (сигнал становится ахроматическим). Фотохроматический интервал, т. е. интервал между абсолютным порогом чувствительности и появлением ощущения цвета для длинных волн (более
130
примерно 660 ммк, красная часть спектра), мал или очень близок к нулю, для коротких он больше. При увеличении интенсивности относительно оптимума цветовой тон меняется (феномен Бецольда—Брюкке), инвариантными по отношению к изменениям интенсивности остаются лишь основные цвета: голубой (470 ммк), зеленый (510 ммк), желтый (570 ммк). Изменение одной части спектра (фиолетовый и зеленовато-голубой) идет в сто-
\:
4SQ 500 МО 580 520
Длина волны, ммк
Рис. 23. Дифференциальный порог цветовой чувствительности (по С. В. Кравкову).
ро'ну приближения к голубому цвету, другой (оранжевый и желто-зеленый) — к желтому. Впрочем, изменения невелики: от +5 до —15 ммк (по Дж. Игапу и Л. Пгетману [379]).
Дифференциальный порог цветовой чувствительности весьма мал. В желтом и голубем цветах спектра разница длины волны, необходимая для различения цветности (ДА,), может достигать 1 ммк.
Наиболее тонко дифференцируются глазо'м длины волн в районе 494 ммк (зеленовато-голубой цвет) и 590 ммк (оранжево-желтый). В средней части видимого спектра (зеленый цвет), а также в его концах (фиолетовый и красный) дифференцировка цветности значительно грубее (рис. 23) 2.
Временной порог чувствительности ошти чес кого анализатора и его зависимость от условий зрения изучены еще недостаточно. Разными авторами указываются различные данные, варьирующие в пределах тысячных и сотых долей секунды. Неоднозначность данных связана с тем, что измерение длительности действия световых раздражителей, необходимого для возникновения едва
1 Несколько подробнее о цветовом зрении говорится в гл. 5. о* 131
300 200 100 |
|
|
|
I I |
|
|
|
|
|
||
* so |
|
|
|
|
|
^ 40 |
|
|
|
|
|
<5j |
V |
|
|
|
|
*§ го |
|
|
|
||
|
|
|
|
||
$ в, |
|
|
|
|
|
|
|
|
|
||
Ц |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
o,t |
101 |
о, |
Of 0,> \питель |
f 1 ность,с |
10 ек |
заметного ощущения, осуществлялось разными авторами в разных условиях. По экспериментальным данным, величина абсолютного временного порога зависит от интенсивности одиночной вспышки света: чем о>на больше, тем меньше порог, и наоборот. Эта зависимость является линейной лишь в определенном диапазоне относительно высоких интенсивпостей (рис. 24).
Рис. 24. Зависимость временного
порога от интенсивности вспышки
(в относит, единицах) (по Блон-
дслю и Рею).
Временной параметр чувствительности оптического аппарата характеризуется также так называемой критической частотой мелькания. Эта величина определяет границу ощущения прерывистого стимула. За ее пределом прерывистый стимул воспринимается как непрерывный; отдельные ощущения от ряда оптических раздражителей, образующих прерывистый стимул, сливаются и субъективно выступают как образ непрерывного стимула. Критическая частота мелькания, так же как и временной порог, зависит от интенсивности светового воздействия. Экспериментально показано, что с увеличением интенсивности она увеличивается (рис.25).
К временному параметру зрительных ощущений относится и длительность сохранения остаточного1, или инерционного, образа. Физиологам и психологам уже давно известно, что возникшее ощущение не исчезает в момент прекращения действия раздражителя, а сохраняется еще некоторое время. Длительность инерции ощущения варьирует, по данным разных авторов, от 0,05 (Вундт) до 1 сек (Ма;к-Даугал). По данным Пьерона [460] и Сперлинга [474], она равна 0,16 сек. Надо полагать, что длительность инерции зрительного образа, как
132
-7 -6 -Ь-4 -3-2-1012 .3 Интенси8ность,лог мламд
Рис. 25. Зависимость критической
частоты мельканий от интенсивности
раздражителя (по Бартли),
и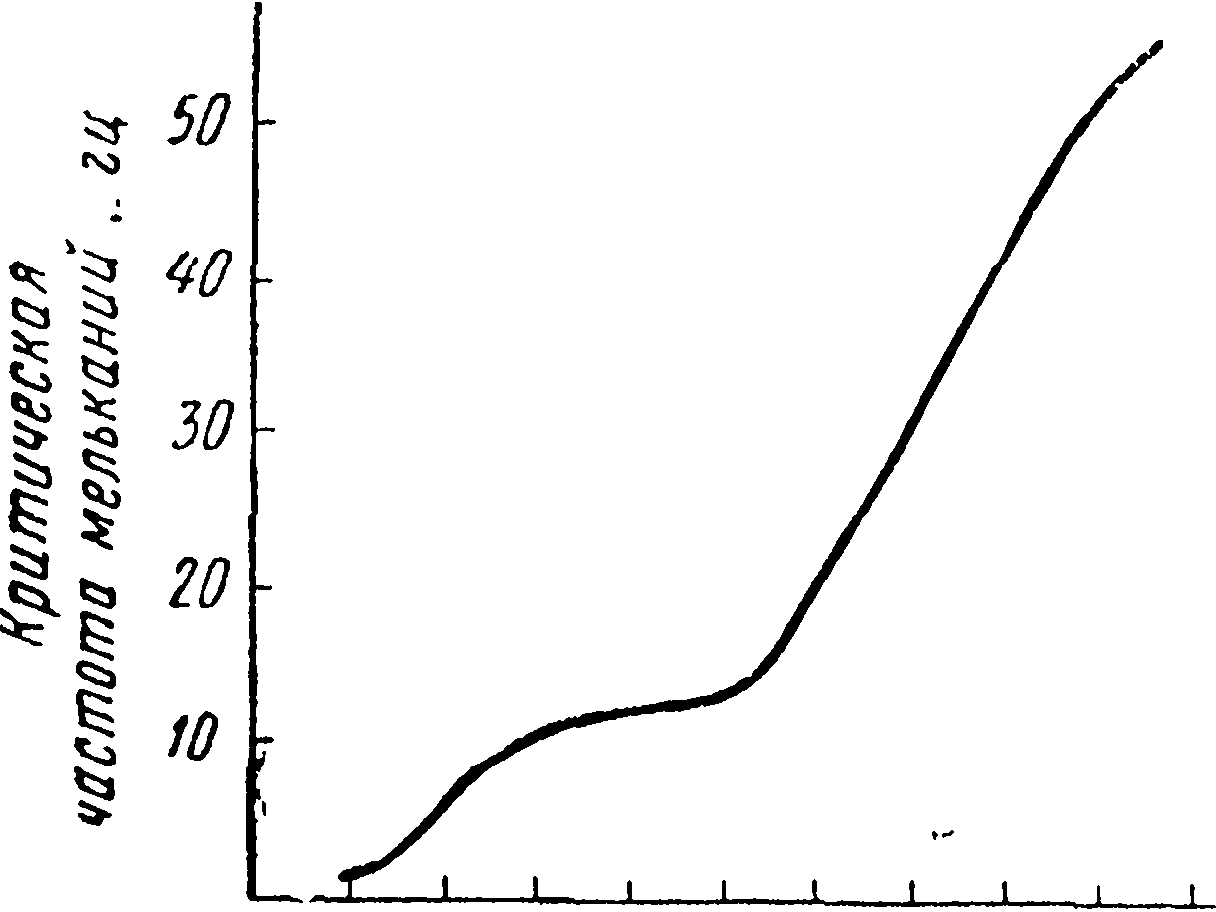 другие его характеристики, не является
константной
величиной,
а варьирует в зависимости от условий
зре
ния и качеств оптического
раздражителя. Это предпо
ложение
подтверждается данными А. В. Луизова,
кото
рый показал, что время инерции
зрения зависит от ярко
сти фона.
При значительной яркости оно равно 0,05
сек,
но
с ее понижением возрастает, доходя до
0,2 сек. Луи-
зов
считает, что инер
ция зрения
является А
важнейшим
условием '
различения. За время
инерции
осуществляет
ся усреднение
световых
воздействий на сетчат
ку,
необходимое для
выделения
полезного
сигнала из шума (в
частности,
из шума, ко
торый обусловливается
квантовой
флюктуаци
ей света). С его
увели
чением растет и разре
шающая
сила глаза!
[214].
другие его характеристики, не является
константной
величиной,
а варьирует в зависимости от условий
зре
ния и качеств оптического
раздражителя. Это предпо
ложение
подтверждается данными А. В. Луизова,
кото
рый показал, что время инерции
зрения зависит от ярко
сти фона.
При значительной яркости оно равно 0,05
сек,
но
с ее понижением возрастает, доходя до
0,2 сек. Луи-
зов
считает, что инер
ция зрения
является А
важнейшим
условием '
различения. За время
инерции
осуществляет
ся усреднение
световых
воздействий на сетчат
ку,
необходимое для
выделения
полезного
сигнала из шума (в
частности,
из шума, ко
торый обусловливается
квантовой
флюктуаци
ей света). С его
увели
чением растет и разре
шающая
сила глаза!
[214].
Вопрос о пороге слияния световых мельканий, такжекаки во'прособ инерции зрения, приобретает особое значение при решении некоторых инженерных задач в двух вариантах. Первый вариант заключается в следующем. При конструировании многих водов аппаратуры возникает необходимость того, чтобы человек не замечал прерывности оптических сигналов. Значит, их частота должна быть выше порога. Суть второго варианта такая: нередко мелькание света попользуется в качестве сигнала о том или ином событии; например, при 'появлении нового объекта на экране мелькания могут служить средством привлечения внимания оператора. В этом случае их частота должна быть ниже порота слияния световых мельканий.
Первый вариант является особенно важным для конструирования кино- и телевизионной аппаратуры. В телевизионных системах, как известно, снятие одной точки длится примерно 0,1 мсек. В 1 сек вспышка этой точки
133
происходит примерно 25 раз. Если иметь в -виду, что при яркости в 314 апостильбов, которой обладает матово-белый экран, когда он облучается светом, пороговая частота слияния мельканий равна 50 гц, то такая величина оказывается значительно ниже пороговой (в два раза). Поэтому у зрителя возникает впечатление мерцания телеизображения. Нанесение на экран веществ, обладающих послесвечением (обычно с длительностью 0,04 се/с), снимает эффект мелыкан'ия, но лишь по отношению к фовеальному (центральному) зрению. Для 'периферического же зрения порог слияния световых мель-калий выше. Значит, чтобы снять эффект мельканий полностью, нужно увеличить длительность послесвечения. Однако это может повести к другому нежелательному эффекту: изображения будут накладываться одно на другое, и у зрителя возникнет впечатление размытости контуров. Одним из наиболее действенных средств преодоления мелькания при телевизионном приеме является чересстрочная развертка изображения. Если, например, сначала передаются четные строки, а потом нечетные, то в целом изображение на экране будет изменяться 50 раз в 1 сек, хотя частота вспышек каждой точки останется прежней (25 раз в 1 сек). Возможна также раз-вертка через две строчки. Это еще более повышает впечатление устойчивости свечения экрана (Лахнер [426]).
В том случае, когда мелькания света иапользуются в .качестве сигнала, возникает вопрос о выборе оптимальной частоты.
Применение мельканий только для привлечения внимания не требует ни различения частоты вспышек, ни оценки их числа. Здесь оптимальной является частота от 3 до 10 вспышек в 1 сек\ длительность каждой из них должна быть не менее 50 мсек ([363, 441], В. Е. Вудсон [502, 503]).
Однако в некоторых системах от оператора требуется хотя бы приблизительная оценка количества или частоты вспышек. Возможности чело(века давать такого рода оценки были экспериментально изучены Д. М. Форзитом и А. Чапанисом [362]. В их экспериментах испытуемым предъявлялись вспышки овета с частотой от 2,5 до 30 в 1 сек. Варьировались также длительность предъявления дискретного сигнала и его местоположение в поле прения. От испытуемых требовалось, по возможности не
134
прибегая к счету, т. е. непосредственно визуально, оценить количество вспышек. В целом оказалось, что при частоте 2,5 вспышки в 1 сек оценка очень точна. Однако с увеличением частоты точность ответов падала. Обычной ошибкой была недооценка количества вспышек (рис. 26). Можно полагать, что возможность оценки количества вспышек базируется на различении их часто-
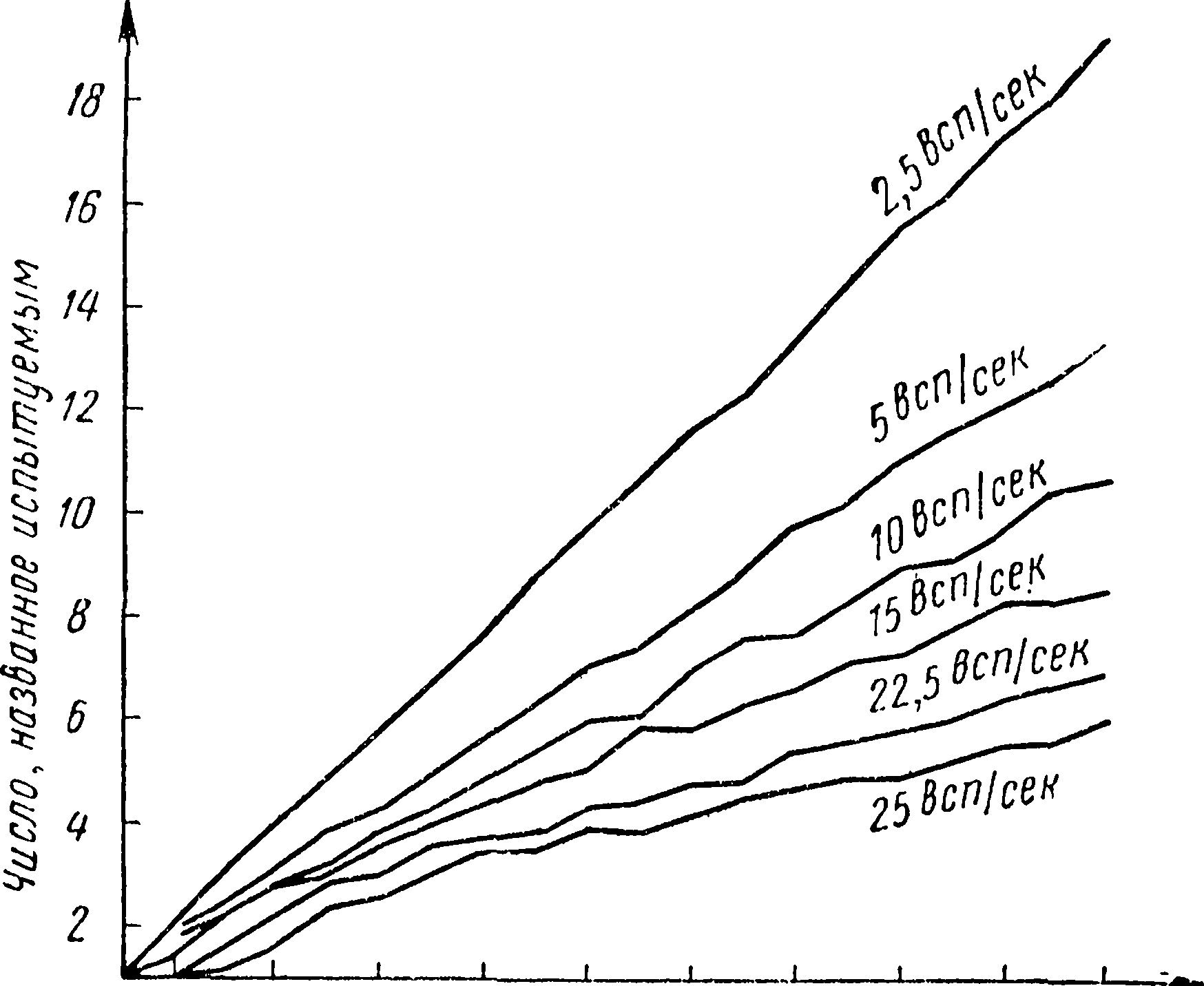
2 4 6 8 10 12 /4 16 18 20" ' Количество предъявлен tib/л вспышек
Рис. 26. Зависимость оценки числа вспышек от их частоты (но Форзнту и А. Чапанису).
ты. Считается, что частота 6—8 гц является пороговой для непосредственно визуальной оценки количества
■'' вспышек.
Наконец, коснемся еще одной общей характеристики
J оптического анализатора — пространственного порога.
. Наиболее элементарной величиной здесь является остро-
f* та зрения. Она определяется тем минимальным расстоянием между двумя точками, при котором возможно ми-. иимальное ощущение их раздельности. Порог остроты I,зрения выражается в угловых единицах. f Обычно за нормальную остроту зрения принимается Такая, порог которой равен 1 у гл. мин. Однако некото-* рые исследователи считают, что в среднем у людей С нормальным зрением она выше. По Теплову, порог
135
нормальной остроты зрения равен 35—40 угл. сек, по Гофману и Хаустону — 30 угл. сек [303].
Важнейшим условием видения, влияющим л а остроту зрения, является расстояние наблюдателя от объекта. Это влияние особенно значительно в пределах примерно до 6 ж, что связано с действием механизма аккомодации. Но при большей дистанции оно почти не проявляется.
Острота зрения изменяется также в зависимости от цвета освещения фона. По данным Л у киша и Тейлора, при красном освещении фона она выше, чем при голубом [по 411].
Экспериментально установлены изменения остроты зрения при изменении интенсивности освещения (наиболее значительны они в пределах от 0 до 100 мламб), и величины светового контраста между объектом и фоном. При этом прямой контраст (темный объект на светлом фоне) и обратный (светлый объект на темном фоне) влияют на остроту зрения по-разному. В условиях обратного контраста ее порог несколько меньше, т. е. острота выше. Это объясняется эффектом иррадиации света в глазе, в результате чего всякая светлая точка изображается на сетчатке несколько размытой. Поэтому видимые границы светлых объектов кажутся расширенными, надвинувшимися на более темную область. С увеличением как яркости фона, так и контраста (и прямого, и обратного) острота зрения растет. Зависимости между яркостью фона, контрастом и остротой зрения представлены в трехмерном графике на рис. 27. Взаимно изменяя яркость фона и величину контраста, можно добиться сохранения остроты зрения на определенном уровне. Так, недостаточность яркости фона может быть компенсирована увеличением контраста, и наоборот. Точно так же можно компенсировать недостаточность контраста или яркости фона, увеличивая угловые размеры рассматриваемого объекта. Однако возможности взаимо-компенсации условий зрительного различения малых величин ограничены.
Слух. Во многих системах управления значительная часть информации поступает к чело-веку в форме звуковых сигналов. Так, опытные станочники, шоферы, трактористы и пилоты могут достаточно точно оценить состояние управляемых машин по шуму моторов. Сонор-
136
ный оператор на подводной лодке, «слушая воду», определяет типы проходящих кораблей, направление их движения и скорость. По шуму на электростанции обслуживающий персонал оценивает состояние работающих агрегатов. Часто акустические процессы служат для передачи человеку сигналов опасности (сирена,
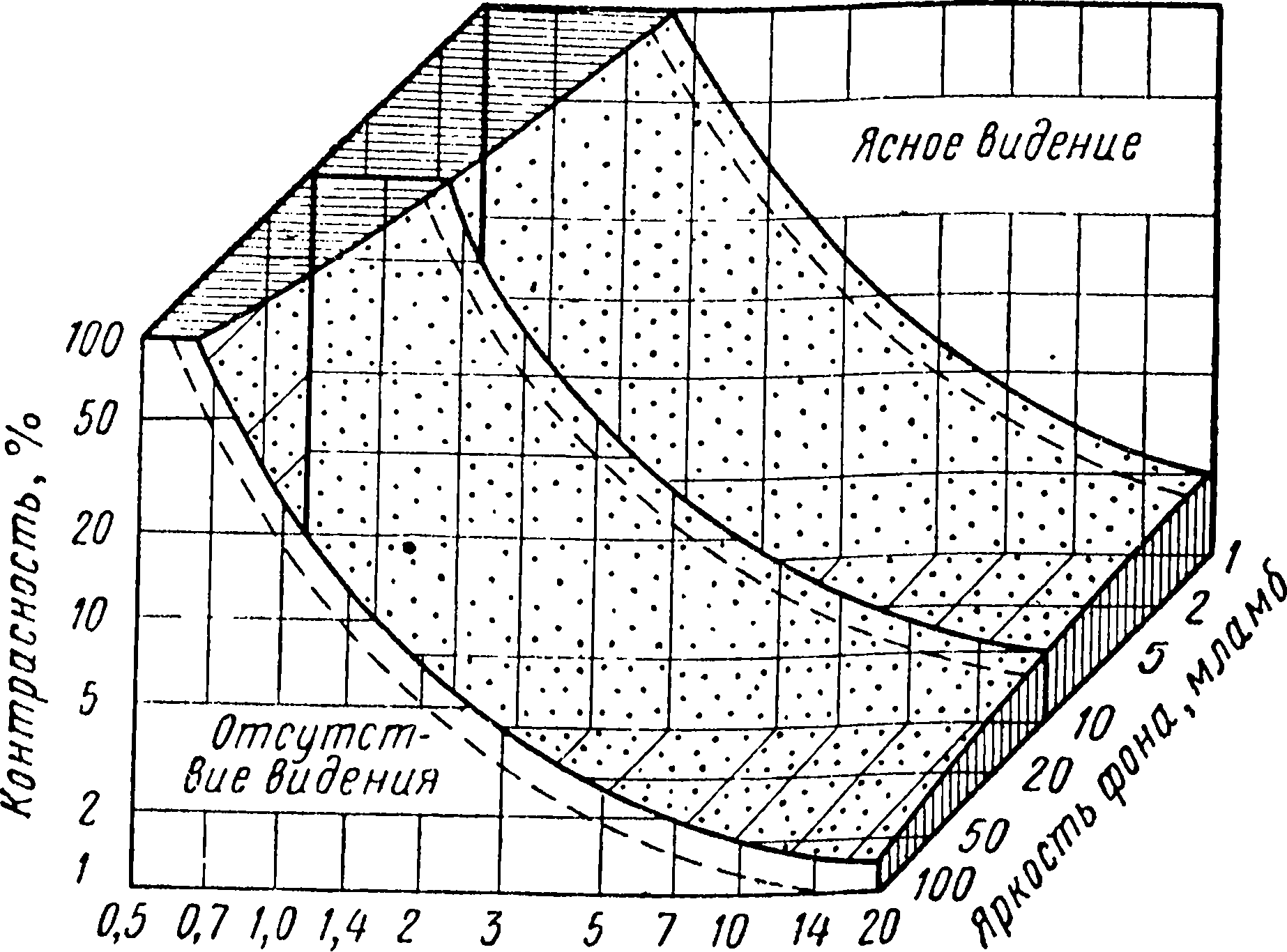
Угол зренил,угл.мин
Рис. 27. Зависимость между яркостью фона, контраст ностью и пороговыми размерами оптического раздра жителя (по Лукишу, Коббу и Моссу): данные для раздражителя, действующего в течение
75 мсек; . — в течение 300 мксек.
звонок и т. п.). Особенно широко звуковые сигналы используются при передаче речевых сообщений.
Основными параметрами звуковых волн являются амплитуда, частота и форма, которые отражаются в слуховых ощущениях как громкость, высота и тембр. Модуляция звуков по этим параметрам позволяет «передать огромную по объему информацию. Но, принимая ее, человек должен детектировать звуковой сигнал, т. е. выделить модулирующую функцию. Исходным процессом в детектировании является слуховое различение.
Возможности слухового различения наиболее общих параметров звуковых волн изучены в физиологии и психологии достаточно подробно. Исследования -позволили определить общие границы области слуховых ощущений.
137
По показателям частоты ощущаемых звуков эта область простирается от 16—20 до 20 000—22 000 гц. Величина абсолютного порота звукового анализатора по показателям интенсивности зависит от частоты ощущаемых звуков. Наиболее низкий порог приходится на среднюю ^область частот (2 000—5 000 гц), он увеличивается в обе

500 1000 2000 5000 Ю000 20000 Частота, гщ
Рис. 28. Общая область звуков, вызывающих слуховые ощущения (по С. Н. Ржевкину).
...стороны от этой области. Диапазон звуковых колебаний, вызывающих слуховые ощущения, изображен на рис. 28.
Надо отметить, что центральное место на «шкале» звукового анализатора (по показателям как интенсивности, так и частоты) занимает зона звуков человеческой речи. С удалением от нее слуховые ощущения становятся все менее и менее дифференцированными. Это свидетельствует об особой роли звукового языка, являющегося основным средством общения между людьми, в развитии слуха человека. На рис. 28 область звуков человеческой речи обозначена штриховкой.
Что касается дифференциального порога акустического анализатора по интенсивности ощущаемых звуков, то согласно первоначальным данным он считался равным 0,1. Однако более детальное изучение различительной чувствительности внесло уточнения. Было показано, что величина едва различимой 'Прибавки к исходному
138
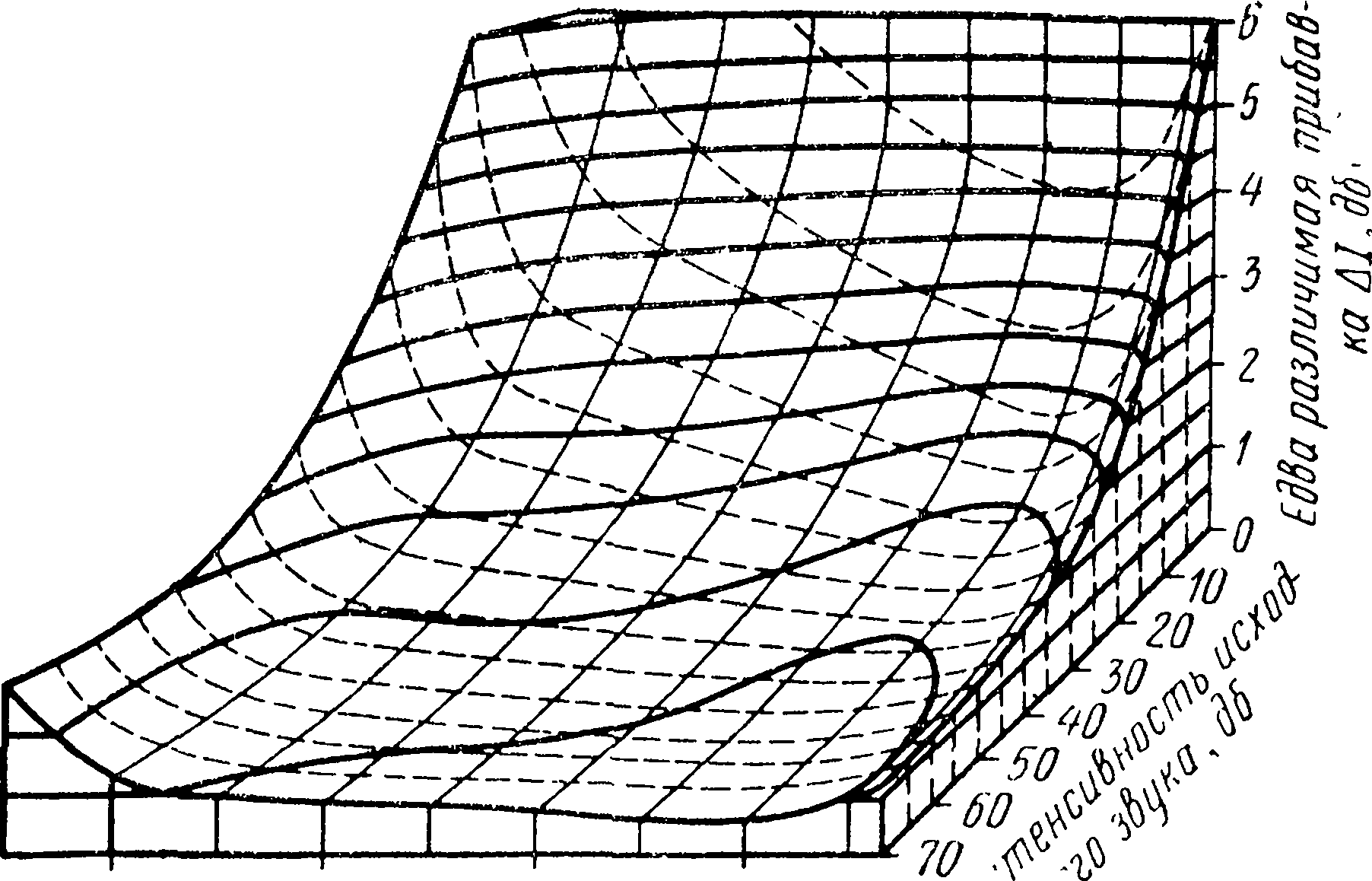
63 Z50 woo то ^ ^
Частота, гц о)
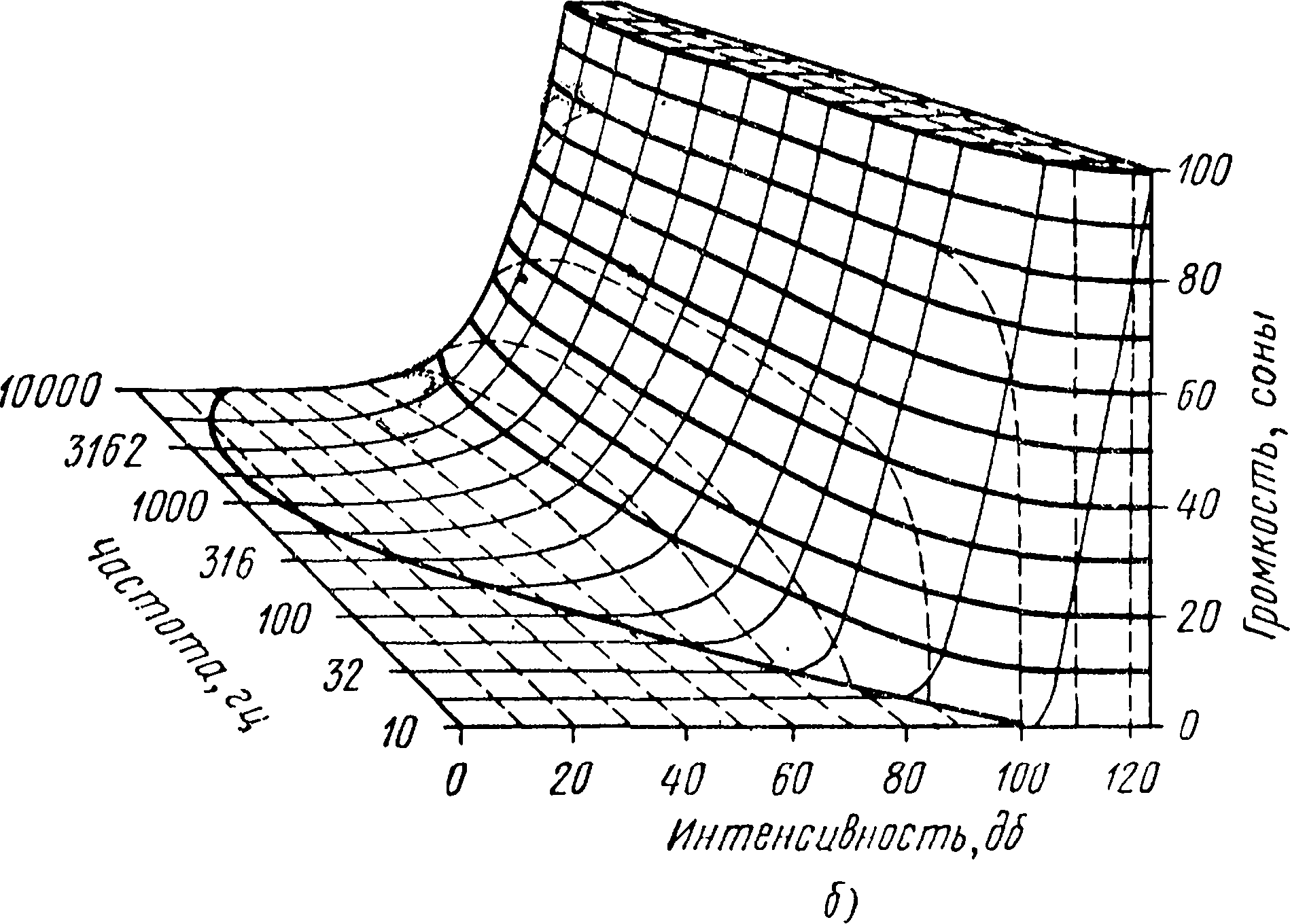
Рис. 29. Зависимость дифференциального порога по
интенсивности от интенсивности и частоты звука (по
Ризу) (а) и громкости от интенсивности и частоты
(по Стивенсу и Дэвису) (б).
звуковому раздражителю зависит не только от его интенсивности, но и от частоты (рис. 29,а).
Соотношение интенсивности и частоты определяет ощущение громкости звука. Экспериментально показано, что человек оценивает звуки, различные по интенсивно*
139
сти, как равные по громкости, если их частота также различна. Например, тон с интенсивностью 120 дб и частотой 10 гц оценивается как равный по громкости тону, имеющему интенсивность 100 дб и частоту 1 000 г^. Таким образом, снижение интенсивности как бы компенсируется увеличением частоты. Соотношения между частотой, интенсивностью и субъективно оцениваемой громкостью представлены на рис. 29,6. Как видно из рисунка, лишь в пределах средних частот (от 100 до 2 500 гц) громкость звука1 определяется преимущественно его интенсивностью. За этими пределами на оценку громкости все большее влияние начинает оказывать частота колебаний звуковых воли.
Надо отметить, что различительная чувствительность по отношению к громкости периодических колебаний звуковой волны (топ) выше, чем по отношению к громкости непериодических колебаний (шум).
Дифференциальный порог по частоте также не является постоянной величиной. Он зависит как от частоты исходного звука, так и от его интенсивности. В пределах от 60 до 2 000 гц при интенсивности звука выше 30 дб абсолютная величина едва различимой прибавки равна примерно 2—3 гц. Для звуков выше 2 000 гц эта величина резко возрастает и изменяется пропорционально росту частоты. Относительная величина дифферен-
AF циального порога у для звуков в зоне 200—16 000 является почти константной и равна примерно 0,002. При сокращении интенсивности звука ниже 30 дб величина дифференциального порога резко возрастает. Сводные данные исследований порогов различительной чувствительности по высоте представлены на рис. 30.
В целом надо отметить, что у человека различение звуков по частоте более совершенно, чем по интенсивности.
Приведенные данные относятся лишь к ощущению и различению звуков в условиях тишины. Но обычно, в реальных условиях деятельности, человеку приходится воспринимать звуковые сигналы на том или ином
1 В современных психо-физических исследованиях субъективно ощущаемая громкость звука измеряется в условных единицах — coiHax (по СтивеН'Су).
140
фоне. При этом фон может маскировать полезный сигнал, что, естественно, затрудняет его обнаружение. При разработке и конструировании акустических индикаторов задача борьбы с эффектом маскировки и поисков оптимального отношения, интенсивности полезного сигнала к интенсивности шума (фона) является одной из важ-
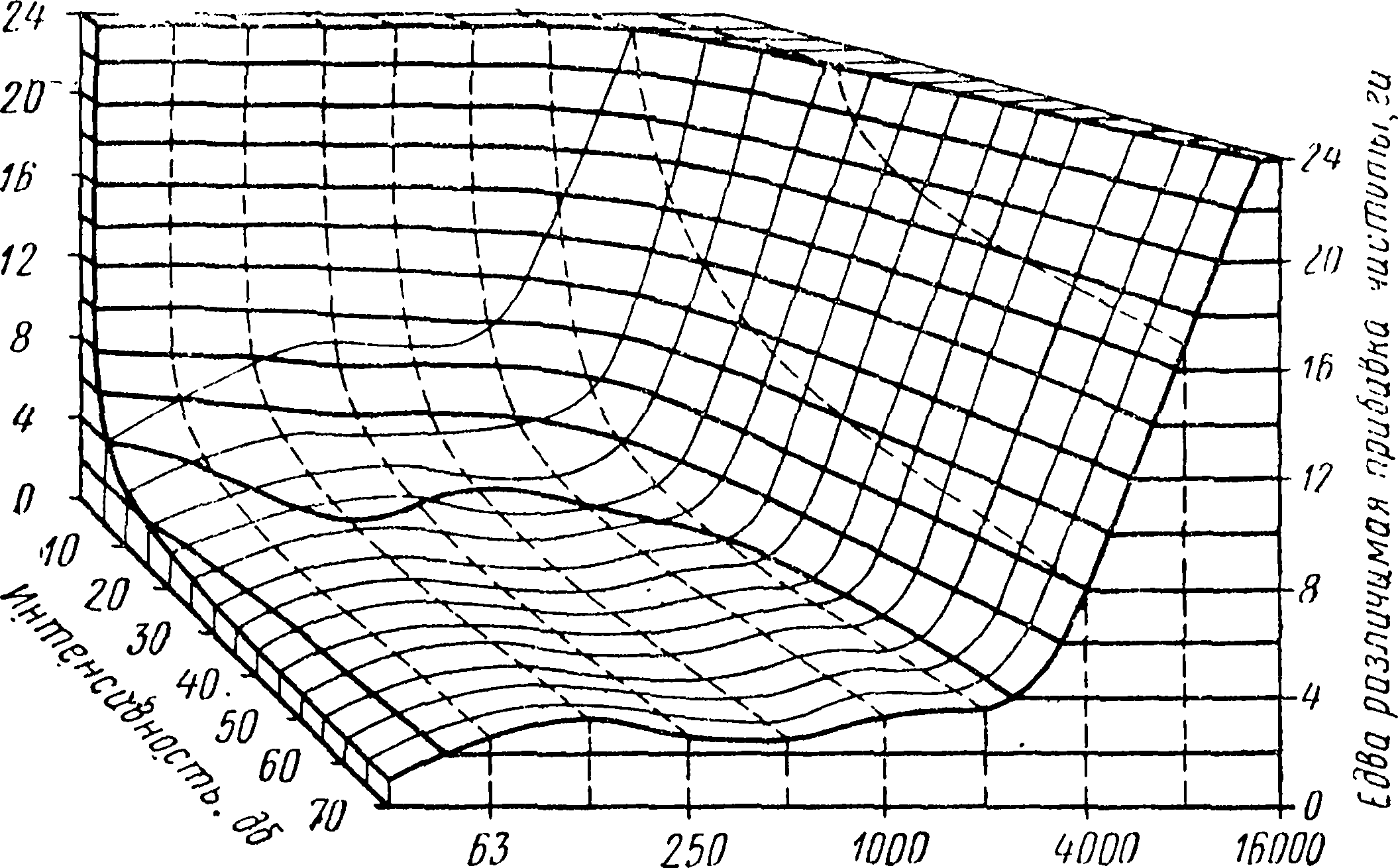
Чистити, гц
Рис. 30. Зависимость дифференциального порога по частоте
от частоты и интенсивности чистого тона (по Шауеру и
Биддлуфу).
нейших. В психологии и физиологии имеется ряд работ, лоовященных изучению эффекта маскировки и условий его возникновения. Вегель и Лане [по 406] изучали условия маскировки одного чистого тона другим. Они установили, что при одновременном воздействии на акустический анализатор двух тонов эффект маскировки тем больше, чем ближе они по высоте. Если же высота тоиов различна, то имеется тенденция маскировки высокочастотного тона низкочастотным. Однако при значительной разнице тонов по высоте эффект маскировки можно преодолеть. Хавкинс и Стивене [по 406] изучали маскирующее действие белого шума (т. е. шума, содержащего все слышимые частоты, звучащие одновременно) на восприятие чистого тона. Они показали, что отношение сигнала (тона) к шуму влияет на восприятие гораздо больше, чем абсолютная величина интенсивности
141
шума. При этом эффект маскировки особенно сильно сказывается в отношении тонов средней и высокой частот. Пороги обнаружения чистого тона (с частотой от 100 до 10 000 гц) на фоне белого шума, имеющего разные уровни интенсивности, представлены на рис. 31.
I I Г 1 I I I I I I I . I I I I I ,1 1 I
wo woo юооо
Частота, гц
Рис. 31. Зависимость порога обнаружения чистого топа от его частоты и от интенсивности белого шума
(по Хавкипсу и Стивенсу). УШ — уровень шума; ПТ — порог обнаружения тона в полной тишине.
Временной порог чувствительности акустического анализатора, т. е. длительность звукового раздражителя, необходимая для возникновения ощущения, так же как пороги по громкости и высоте, не является постоянной величиной. С увеличением как интенсивности, так и частоты он сокращается. При достаточно высокой интенсивности (30 дб и более) и частоте (1000 гц и более) слуховое о-щущение возникает уже при длительности звукового раздражителя, равной всего 1 мсек. Однако при уменьшении интенсивности звука той же частоты до 10 дб временной порог достигает 50 мсек. Аналогичный эффект дает и уменьшение частоты.
Оценка громкости и высоты очень коротких звуков затруднена. При длительности синусоидального тона 2—3 мсек человек лишь отмечает его наличие, но не может определить его качеств. Любой звук оценивается только как «щелчок». С увеличением длительности звука слуховое ощущение постепенно проясняется: человек начинает различать высоту и громкость. Минималь-
142
ное время, необходимое для отчетливого ощущения высоты тона, равно примерно 50 мсек.
Дифференцировка двух звуков по частоте и интенсивности также зависит от отношения их по длительности и от интервала между ними. Как правило, звуки, равные по длительности, различаются точнее, чем неравные. По данным С. Н. Гольдбурт, чем короче два сравниваемых тона, тем длиннее должен быть интервал меж!ду ними. Так, пара тонов, каждый длительностью 5—10 мсек, различается по громкости, если интервал между ними не менее 30—50 мсек. Пара тонов длительностью по 50 мсек различается уже при интервале 3 мсек [80].
Акустический анализатор обеспечивает отражение не только амплитуды, частоты и формы колебаний звуковых волн, но и положения источника звука в пространстве: его расстояние и направление относительно субъекта. По данным некоторых авторов, короткие дистанции, порядка 1—2 ж, оцениваются довольно грубо, с точностью до десятков сантиметров. С увеличением дистанции до 3 ж точность оценки возрастает примерно вдвое, однако на дистанции 4 ж она вновь снижается, правда, все еще оставаясь более высокой, чем та дистанции 2 ж. Надо отметить, что расстояние до движущегося объекта определяется на слух точнее, чем до неподвижного.
Важную роль в оценке изменений расстояния до источника звука 'играет различение изменений громкости. Звук, громкость которого увеличивается, воспринимается как приближающийся, и наоборот. Другим основанием оценки расстояний на слух является звуког высотное различение. Известно, что при приближении звучащего тела к слушателю частота звуковых колебаний увеличивается, а при его удалении уменьшается (эффект Допплера). Это отражается в слуховых ощущениях в форме изменения высоты звука. Опытные сонорные операторы могут по изменениям высоты звука, производимого тем или иным движущимся судном, достаточно точно определять его скорость, направление движения и расстояние. Наконец, значительное влияние на оценку расстояния оказывает тембр. Как показала С. Е. Драпкина, более тембрированпып звук (более сложная форма звуковой волны) обычно оценивается
143
как более удаленный, а менее тембрированный — как более близкий [101].
Точность распознавания направления звука различна по отношению к волнам разной частоты. Для низких частот (до 800 гц) порог различения направления в горизонтальной плоскости равен примерно 10—'11°; с увеличением частоты он возрастает, достигая 20'—22° в районе 3000 гц, а затем вновь уменьшается. Для частоты 10 000 гц порог различения направления не превышает 13° (Стивене и Ньюмен [по 411]).
Точность определения направления зависит также от положения источника звука относительно координат человеческого тела. Наиболее точно дифференцируются направления в горизонтальной плоскости. При этом на первом месте по точности оказывается правое направление, затем — левое. Достаточно хорошо дифференцируется переднее направление. Но с ним часто смешиваются верхнее и заднее. Точность оценки верхнего и заднего направлений в два с лишним раза меньше по сравнению с левым и правым ((Драпкина [100]).
Решающую роль в восприятии направлений звука играет взаимодействие сторон акустического анализатора (бинауральный эффект). Известно, что если источник звука находится прямо перед человеком, то звуковые волны достигают обоих ушей одновременно. Если же он отклоняется вправо или влево, то время прихода звука к одному уху будет короче, чем к другому. Этой разностью и определяется оценка направления источника звука. Воспринимаемый угол отклонения от средней линии пропорционален величине этой разности. Значительное место в бииауральном слухе принадлежит также отношению амплитуд звуковых колебаний, поступающих на правое и левое ухо. Это было показано опытами, в которых на парные слуховые рецепторы одновременно и раздельно подавались два звука, различные по интенсивности. В результате у испытуемого возникала иллюзия смещения источника звука в сторону, соответствующую тому уху, которое раздражалось звуком более высокой интенсивности. В восприятии направления низких звуков первостепенное значение имеет разница по времени раздражения обоих ушей, в восприятии направления высоких звуков — разница по интенсивности [по 406 и 411]. Обобщая результаты исследования бинаураль-
144
наго слуха, Ананьев [4] пришел к выводу, что основу дифференцировки направления звука составляет разность по времени и фазам (следует добавить также «по интенсивности») возбуждения между двумя сигнализациями в кору головного мозга от обоих ушей.
Вибрационная чувствительность. Известно, что не-редко оператору приходится работать в условиях вибраций. Поэтому важно знать, как они влияют на общее состояние оператора, его работоспособность и продуктивность. Известно, что вибрация высокой интенсивности при продолжительном воздействии приводит к серьезным изменениям деятельности всех систем организма и при определенных условиях может вызвать тяжелое заболевание. Однако при небольшой интенсивности и длительности воздействия она оказывает благоприятное влияние: уменьшает утомляемость, повышает обмен веществ, восстанавливает трофику тканей и увеличивает мышечную силу.
Вместе с тем изменения вибрации часто служат для человека сигналами изменения состояний управляемого объекта. Это возможно потому, что ее воздействие на организм не ограничивается только чисто физиологическими эффектами. Вибрация, передаваемая от среды к организму, отражается субъектом в форме особого рода ощущений. Вибрационная чувствительность в некоторых отношениях близка к слуху. Раздражителем, вызывающим вибрационные ощущения, также являются колебательные движения упругой среды. Образно говоря, вибрационная чувствительность — это «контактный слух». Несмотря на то, что она является особым и самостоятельным видом чувствительности, специальных виброанализаторов, подобных оптическому, акустическому и др., не существует, точнее, они неизвестны 1.
1 Существует несколько гипотез о происхождении и природе вибрационной чувствительности. Согласно одной из них она представляет собой переходную форму от тактильной чувствительности к слуху: тактильные рецепторы обычного типа являются и виброрецепторами (Дарвин, Джелдард, Герцог, Трейтель, Эрхард, Румпф)\ Другая гипотеза трактует ее как костную чувствительность (Двой-ченко, Дежерин, Кунаков, Маринеско, Щербак). Наиболее обоснованной сейчас является «общетканевая» гипотеза, сформулированная В. М. Бехтеревым. Можно предполагать, что вибрационная чувствительность относится к наиболее древним видам чувствительности.
10—2286
145
В обычных условиях жизни и деятельности человека вибрационная чувствительность тормозится слухом, зрением и осязанием. Но при выключении этих видов рецепции она растормаживается и может достигнуть высокой степени совершенства [9, 36]. Условием ее развития является также специальная тренировка. Если, напри-
ю2
W1
о
кг3
Ю'4
|
|
|
|
|
|
|
|
-А 2 |
Г~ |
|
|
|
|
|
|
|
|
||
\ -V- \ |
—- |
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
/ |
^ |
|
|
|
|
|
|
|
|
|
|
W0 200
300 400 Частота, гц
i г | рн
900 10000
Рис. 32. Область вибраций, вызывающих ощущения (по Е. И. Андреевой-Галаниной, Мауб-
рею и Джелдарду): / — абсолютный порог вибрационного ощущения; 2 — порог тягостного ощущения.
мер, вибрация становится для рабочего сигналом состояния станков, машин и т. д., то чувствительность по отношению к ней обостряется.
Диапазон ощущения вибраций весьма широк: от 1 до 10 000 гц. Наиболее высока чувствительность к частотам 200—250 гц [по 412]. При их увеличении и уменьшении вибрационная чувствительность снижается (рис. 32).
Человек обладает довольно высокой способностью дифференцировать амплитуду колебаний вибрирующего тела. Так, А. И. Вожжова установила, что при частоте 100 гц человек дифференцирует амплитуду с точностью до 3—5 мк. Любомудров указывает величину в 6,1 мк. Кнудсен после длительной тренировки испытуемых добился того, что они стали различать вибрации, отличающиеся друг от друга всего на 1 мк.
Дифференциальная чувствительность по частоте также достаточно высока. По Кнудсену, человек способен определить разницу тонов с точностью до '8%. Гильмер и Роберте указывают еще более малую величину (2,5%). Если вибрация имеет небольшую амплитуду, то высокие частоты дифференцируются лучше низких.
146
Пороги вибрационной чувствительности различны в разных участках тела. Наибольшей чувствительностью обладают дистальные отделы конечностей. Наименее чувствительными являются кожа шеи, плечевого пояса и бедра.
Тактильная чувствительность. Абсолютный порог тактильной чувствительности определяется по тому минимальному давлению предмета на кожную поверхность, которое производит едва заметное ощущение прикосновения. Наиболее высоко развита чувствительность на дистальных частях тела, поскольку они особенно часто контактируют с предметами. Величина 'порогов здесь не превышает нескольких г/мм2.
Диапазон давлений, адекватно отражаемых в тактильных ощущениях, различен для разных участков кожной поверхности. Дистальные части тела также обладают наиболее широким диапазоном. Так, для кончиков пальцев руки он простирается от 3 г/мм2 (нижний абсолютный порог) до 300 г/мм2 (верхний абсолютный порог).
Порог различения в среднем равен примерно 0,07 исходной величины давления.
Интенсивность ощущения давления зависит от скорости, с которой осуществляется деформация кожи: чем больше эта скорость, тем больше интенсивность ощущения при той же величине давления (Гриндлей, Нейф, Вагонер и др. [по 406]).
Временной порог тактильной чувствительности, по данным некоторых авторов, равен 130 мсек. Однако имеются факты, которые позволяют предполагать, что в действительности он короче. Так, кожно-механический анализатор способен различать несколько десятков прикосновений в секунду, наносимых 'на кончик пальца руки.
Пространственный порог тактильной чувствительности, подобно интенсивностному, зависит от места приложения раздражителя. Наиболее низок он опять-таки на дистальных частях тела. Так, порог ладонной части концевой фаланги пальца руки равен 2,2 мм, в то же время порог плечевого участка кожи — 67,7 мм.
Различие порогов для разных участков кожи определяется прежде всего неравномерностью распределения рецепторов кожно-механического анализатора.
10*
147
Температурная чувствительность. Другим видом кожной чувствительности является температурная. Она свойственна лишь тем организмам, которые обладают постоянством температуры тела (изотермией), обеспечиваемым регуляцией процесса теплообмена между организмом и средой. Температурное ощущение всегда есть ощущение разности температур кожи и окружающей среды. Температура кожи несколько ниже температуры тела. На лбу она равна 34—35°, на лице 20—25°, на коже живота 34°, на стопах ног 25—27°. Средняя температура открытых (свободных от одежды) участков кожной поверхности равна 30—32°. Изменение температуры в данном участке кожи ощущается как тепло или холод в зависимости от направления и величины теплообмена.
В коже человека обнаружено два рода температурных рецепторов. Одни из них реагируют только на холод, другие — только на тепло.
Абсолютный порог температурной чувствительности определяется по минимальному ощущаемому изменению температуры того или иного участка кожи относительно физиологического нуля, т. е. собственной температуры данного участка. Для тепловых рецепторов он равен примерно 0,2°, для Холодовых 0,4° [411]. Порог различительной чувствительности несколько менее Г. При 'прочих равных условиях холодовое различение является более тонким, чем тепловое. Величина как абсолютного, так и дифференциального порогов в значительной степени зависит от скорости и величины температурной адаптации.
Пространственные пороги температурной чувствительности различны по отношению к различным формам стимуляции. При контактной стимуляции воздействие на кожную поверхность площадью в 1 мм2 уже вызывает температурное ощущение. При воздействии излучением, т. е. на дистанции, оно возникает только в том случае, если раздражаемая площадь не менее 700 мм2. Очень интенсивное излучение, воздействующее на меньшую площадь, может вызвать лишь болевое ощущение, но не температурное.
Латентный период температурного ощущения равен примерно 250 мсек.
Болевая чувствительность. Как уже отмечалось, воздействие сверхмощного раздражителя, превышающего
148
верхний абсолютный порог, вызывает болевое ощущение в любом анализаторе. Исходя из этого, некоторые исследователи отрицали существование специальных рецепторов болевой чувствительности. Однако в эпителиальном слое кожи были обнаружены свободные нервные окончания, которые и являются специализированными болевыми рецепторами. Как и другие кожные рецепторы, они распределены неравномерно. Наименьшая плотность болевых рецепторов приходится на те участки кожи, которые наиболее богаты тактильными рецепторами, и наоборот. Противоречивые отношения между болевой и тактильной чувствительностью, проявляющиеся в распределении рецепторов, обусловлены различием (и в известном, смысле противоречивостью) их функций в жизни организма. Дело в том, что болевые ощущения вызывают оборонительные рефлексы, в частности рефлекс удаления от раздражителя. Напротив, тактильная чувствительность интимно связана с ориентировочными рефлексами: ощущения этой модальности вызывают рефлексы на сближение с раздражителем.
Биологический смысл боли состоит в том, что она, являясь сигналом опасности, мобилизует организм на борьбу за самосохранение. Под влиянием болевого сигнала перестраивается работа всех систем организма, что приводит к повышению его реактивности. Особо следует отметить повышение тонуса скелетной мускулатуры, сократимости и возбудимости мышц, а также увеличение чувствительности всех анализаторов. Это обеспечивает быстроту оборонительных реакций и большую, чем обычно, предусмотрительность поведения *.
Долгое время в психологии и физиологии считалось, что боль является диффузной эмоцией и не несет в себе никаких элементов отражения. Однако затем исследования показали, что в болевых ощущениях достаточно точно отражаются интенсивность, качество, длительность воздействия болевого разражителя, а также место его приложения. При определенной тренировке болевая чувствительность повышается [6, 20].
Наиболее высока болевая чувствительность роговицы (порог 0,2 г/мм2) и конъюнктивы (порог 2 г/мм2). Боле-
1 Подробное описание эффектов болевого раздражения дается в книге С. М. Дюшесов а [94].
149
вая чувствительность кожи значительно ниже: порог от 20 г/мм2 (кожа живота) до 300 г/мм2 (кончики пальцев руки).
В области боли основной психофизический закон не действует. Здесь существует почти прямая зависимость между интенсивностями ощущения и раздражения в диапазоне до (порога выносливости.
Латентный период болевого ощущения составляет 370 мсек. Критическая частота слияния дискретных, болевых раздражений равна 3 в 1 сек.
Мышечная и систавная чувствительность. Конечным эффектом зрительных, слуховых, тактильных и иных ощущений являются движения тела и его частей. В то же время осуществляемые движения сами являются источником и объектом особого рода ощущений, так называемых двигательных, или кинестетических. Выступая в качестве сигналов обратной связи, эти ощущения играют существенную роль в построении двигательного акта, обеспечивая его регулирование и .корректировку. Детальный анализ кинестезии, ее места и значения в структуре чувственного познания и деятельности человека был дан еще Сеченовым. Позднее работами Павлова и его сотрудников было доказано существование особого анализатора, отражающего движения и положение частей тела. Оказалось, что область коры больших полушарий, считавшаяся ранее моторной, является сенсорной, а именно мозговым концом двигательного анализатора. Рецепторы этого анализатора расположены в мышцах, капсулах мышц, сухожилиях и фасциях. Они раздражаются механическими воздействиями, возникающими при изменении напряжения мышечной ткани (ее деформации) и взаимоположения сус.тавов. По мнению некоторых исследователей, рецепторы, расположенные в мышцах, возбуждаются только при растяжении мышц, а рецепторы, расположенные в сухожилиях,— только при их сокращении. Такое разделение обеспечивает взаимную корректировку сигналов и тонкий анализ производимых движений.
Обычно о мышечной и суставной чувствительности говорят как о едином свойстве — как о мышечно-сустав-ной чувствительности. Между тем имеются некоторые основания считать, что это два разных вида чувствительности, хотя функционально они и объединены. Первая из
150
них, мышечная, обеспечивает отражение величины деформации мышц, вторая — перемещения соприкасающихся суставов относительна друг друга. Суставная чувствительность имеет много общего с тактильной. Кстати сказать, в тканях, непосредственно окружающих суставы, обнаружены в большом количестве тактильные рецепторы. Видимо, условия возникновения суставных и тактильных ощущений сходны: и в том и в другом случае решающая роль принадлежит перемещениям твердого тела относительно рецепторной поверхности. Суставные ощущения играют особенно большую роль в отражении амплитуды и траектории движений. Однако вопрос о природе «суставной чувствительности» остается до сих пор неясным.
Мышечные и суставные ощущения обеспечивают отражение всех основных качеств движений человеческого тела и его органов: интенсивности, скорости, длительности, амплитуды, траектории и т. д. Наиболее точно и тонко дифференцируются движения рук, пальцев, языка и губ. В этом выражается влияние труда и речи иа развитие чувствующих аппаратов человеческого мозга 1.
Статико-динамическая чивствительность (ощущения положения и ускорение Анализатором, производящим ощущения положения тела, его вращения и перемещения в окружающем пространстве, является вестибулярный аппарат с соответствующими нервными путями и мозговым концом. Его периферический конец расположен во внутреннем ухе и имеет две группы рецепторов. К первой относятся волосковые клетки, выстилающие поверхность полукружных каналов и раздражаемые перемещением эндолимфы при изменении положения человеческого тела в пространстве. Это обеспечивает отражение вращательных движений [(углового ускорения), а также частично — положения тела и линейного ускорения. Вторая группа рецепторов расположена в преддверии внутреннего уха (чувствительные клетки мешочков преддверия, раздражаемые давлением известковых кристаллов-отолитов). Их адекватными стимулами явля-
1 Экспериментальные данные об ощущениях движения приводятся в гл. G, в связи 'С анализом моторных компонентов действий оператора.
151
ются сила тяжести и линейное ускорение. Сигналы от этих рецепторов регулируют статические рефлексы положения головы относительно направления силы тяжести и динамические рефлексы в ответ на движения. Благодаря этим сигналам обеспечивается отражение положения тела по отношению к плоскости опоры.
По мнению некоторых исследователей, вестибулярный аппарат является основным анализатором пространства. Так, И. С. Беритов считает, что ориентировка в правом и левом направлениях является функцией одного только вестибулярного аппарата [1DJ. Но с этой точкой зрения вряд ли можно согласиться. Как показывают многочисленные исследования (Э. Ш. Айрапетянц [2], Ананьев [4] и др.), отражение пространства осуществляется комплексом функционально объединенных анализаторов.
Обычно постоянное положение тела и постоянная скорость его пассивного перемещения (езда в поезде, автомобиле, полет в самолете и т. п.) не ощущаются. В этом случае регуляция положения тела в пространстве осуществляется безусловнорефлекторно.
Специфические ощущения возникают лишь при изменении величины силы тяжести и ее направления, а также при изменении скорости движения человека (положительное или отрицательное ускорение). В этом случае фоновая автоматическая регуляция тормозится, и возникают корковые реакции.
Характеристики вестибулярной чувствительности изучены еще крайне слабо. Наиболее исследованными являются ощущения, возникающие при вращении тела. Пороговое ускорение при вращении вокруг вертикальной оси равно 0,8—2,4 град/сек2.
Некоторые авторы установили гораздо меньшую величину—0,2 град/сек2 (Тумаркии) и 0,5 град/сек2 (Дол-ман, Гроин, Джонгкис).
Порог ощущений, возникающих при наклоне тела, зависит от направления наклона. При наклоне вперед — назад он равен 2°; при наклоне вправо — влево — от 1 до 1,5°.
Порог чувствительности к ускорению прямолинейного движения в горизонтальном направлении составляет 0,1 м/сек2, в вертикальном направлении — 0,12 м/сек2.
152
Проблема вестибулярной чувствительности стала особенно острой в связи с развитием скоростных средств передвижения. Изменение условий работы вестибулярного аппарата при использовании этих средств породило ряд новых психических и психофизиологических явлений. Так, при слепом полете у большинства летчиков возникают иллюзии пространственного положения самолета (кренов, вращения, планирования, кабрирования, неподвижности и т. д.). В их образовании участвует комплекс анализаторов, среди которых вестибулярный часто играет решающую роль [88].
При длительном раздражении вестибулярного аппарата сверхпороговыми стимулами (качание на качелях, морская качка, резкие изменения скорости движения и т. п.) у некоторых людей развиваются болезненные явления, так называемая болезнь укачивания («морская болезнь»). Ее характерными признаками являются головокружение, ощущение тошноты, иногда рвота. Нередко возникают иллюзии движения окружающих предметов, неприятного запаха, изменения температуры воздуха. По мнению многих авторов, источником сенсорной стимуляции этой болезни является вестибулярный аппарат.
Вместе с тем у людей, управляющих скоростным транспортом, формируются новые навыки вестибулярного различения. Система связей вестибулярного анализатора с другими, сложившаяся при пешеходном передвижении, перестраивается.
Практика первых космических полетов -показала, что в условиях невесомости пороги чувствительности вестибулярного аппарата понижаются. При этом возможны нарушения системы анализаторов, отражающих пространство. В результате длительное воздействие даже незначительных вестибулярных раздражителей вызывает симптомы болезни укачивания. Однако специальная система подготовки космонавтов, разработанная советскими учеными, повышает устойчивость вестибулярного анализатора, что позволяет преодолеть отрицательное воздействие ускорений и невесомости на нервную систему человека. Важным моментом такой подготовки является формирование функциональных связей вестибулярного анализатора с другими, особенно со зрительным и двигательным.
153
Детальное изучение статико-динамической чувствительности представляет для инженерной психологии большой интерес. Точные данные об этом виде чувствительности необходимы для определения допустимых (и оптимальных) ускорений, равномерности и неравномерности движения, вращений и т. д. при конструировании машин, используемых для транспортировки людей.
Обоняние. В обонятельных ощущениях отражаются свойства химических веществ. В основном источниками запаха являются соединения, особенно органические. Запах является индивидуальным свойством химических соединений (А. И. Бронштейн [34]). Качество запаха и его интенсивность определяются структурой соединения, а также его летучестью и растворимостью. У животных обоняние тесно связано с функциями пищевого обмена, размножения и полового подбора. Под влиянием трудовой деятельности обоняние человека преобразовалось. Некоторые его функции утратились, некоторые изменились. Вместе с тем возникли и новые функции обоняния, а именно дифференцировка химических свойств вещей в процессе их производства и научного познания. В ряде отраслей производства (парфюмерной, пищевой, химической) запахи являются сигналами хода технологического процесса и свойств обрабатываемых веществ. Часто они сигнализируют человеку о нарушении в управляемых объектах (например, запах жженой резины является сигналом короткого замыкания в электрической цепи).
Абсолютный порог обоняния у человека весьма мал: он измеряется миллиграммами и тысячными долями миллиграмма вещества на литр воздуха. Но дифференциальный порог обоняния высок. Отношение едва различимой прибавки к исходной величине для разных по качеству раздражителей колеблется от 50 до 16%', составляя в среднем 38%. Дифференциальный порог особенно высок при слабых интенсивностях раздражителя, но о их увеличением он уменьшается, достигая минимальной величины 10%. Чувствительность к запаху изменяется под влиянием упражнений и знания о веществах.
В психологии имелись неоднократные попытки дать классификацию обонятельных ощущений. Так, Хеннинг считал, что существует всего шесть основных запахов:
154
благоухающий, эфирный, смолистый, пряный, гнилой, горелый, а все остальные являются их комбинациями. Другие исследователи сокращают это число до четырех: благоухающий, кислый, горелый и каприловый (Крокер и Хендерсон). Авторы этих классификаций шли главным образом от характеристики ощущений, а не свойств отражаемого объекта. Можно полагать, что подлинно научная классификация обонятельных ощущений будет создана на основе детального изучения химических свойств пахучих веществ и особенностей их взаимодействия с обонятельным анализатором.
Вкус Подобно обонянию, вкус относится к хеморе-цепции \ Адекватным раздражителем вкусового анализатора являются химические свойства веществ, потребляемых организмом в процессе пищевого обмена. Так же как и запах, вкусовые качества являются индивидуальными признаками химических соединений.
В физиологии и психологии распространенной является «четырехкомпонентная» теория вкуса, согласно которой существуют четыре вида элементарных вкусовых ощущений: сладкого, горького, кислого и соленого, все же остальные представляют собой их комбинации2.
Абсолютные пороги вкусового анализатора, выраженные в величинах едва ощущаемых концентраций раствора, примерно в 10000 раз выше, чем обонятельного. В отношении различных вкусовых качеств они значительно1 варьируют. На первом месте по величине стоит чувствительность к горькому (наименьший порог), затем следует чувствительность к кислому, соленому и, наконец, сладкому (наивысший порог).
Исследования показывают, что сдвиги процессов обмена приводят к изменению абсолютной чувствительности вкусового анализатора. Так, чувствительность к сладкому значительно повышается при голодании, в связи с изменением углеводного обмена. Сдвиги минерального обмена прежде всего влияют на пороги чувствительности к соленому. Чувствительность к кислому
1 Наряду с обонянием и вкусом к хеморецепции относится так же общая химическая чувствительность, которою обладают влаж ные слизистые оболочюи и наружная оболочка глазного яблока.
2 В формировании вкусового ощущения тех или иных веществ участвуют также тактильный, болевой, обонятельный, температур ный анализаторы и кинестезия языка.
155
и горькому в состоянии голодания обычно понижается. Следовательно, вкусовые ощущения отражают не, только свойства пищевых веществ, но и состояние самого организма. Надо отметить, что эта особенность характерна и для обоняния.
Различительная чувствительность вкусового анализатора довольно груба. В среднем отношение едва ощутимого прироста раздражителя к исходному составляет 20% для всех вкусовых качеств. Но под влиянием практической деятельности и специальных знаний чувствительность вкусового анализатора может быть значительно развита. Это наблюдается, например, в деятельности дегустаторов.
Латентный период вкусовых ощущений зависит от качества раздражителя, места его приложения и интенсивности.
Органическая чувствительность. Мозг человека полу-чает информацию не Только от окружающей среды, но и от самого организма. Установлено, что чувствительные нервные аппараты имеются во всех внутренних органах (В. Н. Черниговский [324]). Сигналы, поступающие от внутренних органов, являются необходимым условием регуляции их деятельности. При нормальной деятельности эти сигналы обычно очень слабо дифференцируются субъектом и не осознаются. Поэтому субъективное отражение состояний организма выступает лишь как «темное, валовое чувство» (Сеченов). Однако при нарушении деятельности тех или иных органов возникают довольно отчетливые ощущения, позволяющие дать грубую локализацию нарушения и иногда его характер.
По характеру стимуляции все рецепторы внутренних органов вне зависимости от их локализации делятся на несколько видов: хеморецепторы, терморецепторы, болевые рецепторы и механорецепторы. Специфическими раздражителями хеморецепторов внутренней среды организма являются изменения в обмене веществ между тканями и органами тела. Посредством терморецепторов отражаются изменения температуры внутренних органов, обусловленные процессом терморегуляции. Болевые рецепторы внутренних органов обеспечивают отражение нарушений тех или иных функций. Приемниками механических раздражений являются барорецепторы, реагирующие на изменение давления во внутренних органах.
156
Барорецепция принимает участие в формирования ощущений тяжести и положения тела в пространстве. К ме-ханорецепторам относятся также тактильные рецепторы, расположенные во внутренних органах.
Пороги органической чувствительности изучены еще недостаточно. Можно лишь в самой общей форме сказать, что условием возникновения органических ощущений является переход организма (или органа) от одного состояния к другому. При этом, чем более резким является переход, тем отчетливее становятся ощущения (Ананьев [6]).
В тех случаях, когда объектом деятельности человека становится его собственный организм, органическая чувствительность повышается. Повышение ее происходит также при резкой смене физических условий жизни и деятельности человека (изменение климата, атмосферного давления, химического состава воздуха и т. д.).
Заканчивая характеристику анализаторов, приведем сводную табл. 3, характеризующую диапазон их чувствительности по отношению к различным характеристикам стимулов.
В таблице указаны нижний (абсолютный) и верхний пороги чувствительности, а также число различаемых градаций стимулов (в условиях одновременного предъявления пары стимулов, т. е. в таблице приводятся данные, характеризующие относительную различимость).
Взаимодействие анализаторов. Таковы вкратце ха^ рактеристики чувствительности анализаторов человека. Как показывают многочисленные исследования, эти характеристики не являются неизменными. Под влиянием ряда факторов чувствительность анализаторов развивается. Особенно большими возможностями изменения обладает различительная чувствительность, которая может увеличиваться в несколько раз, достигая высоких ступеней совершенства. Возможно также расширение общего диапазона чувствительности. Решающим фактором развития чувствительности является трудовая деятельность человека.
Перечисленные анализаторы функционируют не изолированно друг от друга. Они -представляют собой единую сложную систему, все части которой теснейшим образом взаимосвязаны. Многочисленные исследования показали, что воздействие раздражителя на любой ана-
157
ТАБЛИЦА 3
Диапазон обнаружения и различения стимулов разными анализаторами (по Дж. Маубрею и
Ф. Джелдарду [412])
|
[ |
Диапазон обнаружения |
Число разли- |
|
Чувствительность |
Стимул |
нижний абсолютный порог |
верхний порог |
чимых градаций (относительная различимость) |
Зрительная |
Интенсивность белого света Цвет Прерывистый белый свет |
(2,2—5,7).Ю-10 эрг 300 ммк 1 прерыв/сек |
-%Л09 Х(поРоговая интенсивность) ^1050 ммк ^50 прерыв/сек |
570 128 375 |
Слуховая |
Интенсивность звука Частота чистого тона Прерывистый белый шум |
10"9 эрг/см* 16—20 гц 1 прерыв/сек |
'■v.lO14 Х(поРоговая интенсивность) 20000—22000 гц ^2000 прерыв/сек |
325 при частоте 2000 гц 1800 ^460 |
Кожно-механич. и вибрационная |
Механическая вибрация (по амплитуде) Давление Частота механических колебаний |
0,00025 мм 0,026 эрг 1 гц |
^=40 дб выше порога 10бХ (пороговая интенсивность)1 10 000 гц |
^15 Неизвестно ^180 |
Продолжение табл. 3
Число
различимых
градаций
(относительная
различимость) Чувствительность
Чувствительность
Температурная
Статико-динами-ческая
Стимул
Температура
Положение и движение Угловое ускорение
Линейное ускорение
0,2—0,7 град 0,12 г рад! сек2
0,08 град
Неизвестно
Положит, сила инерции 5—8 g. Отрицательная сила инерции 3—4,5 g
То же
Неизвестно
Неизвестно Неизвестно
Неизвестно
Обонятельная
Запах
2-10-7 мг/м*
Неизвестно
Неизвестно
Вкусовая
Вкус
4Х^"7 граммолекул концентрированного раствора
Неизвестно
Неизвестно
Т По дашГым Андреевой-Галаниной.
лизатор не только вызывает его прямую реакцию, но и приводит к тем или иным изменениям всех других анализаторов. Точно так же реакция какого-либо анализатора на воздействие стимула зависит не только от его собственного состояния, но и от состояния всех остальных. В этом выражается принцип целостности организма.
Механизм взаимодействия анализаторов сложен. Одним из путей влияния анализаторов друг на друга являются так называемые «эфаптические» связи, обеспечивающие прямую передачу возбуждения с нейронов одного анализатора на нейроны другого. Другой путь — влияние через вегетативную нервную и гуморальную системы. Большую роль во взаимодействии анализаторов играет также ретикулярная формация, участвующая в регуляции уровня возбуждения коры головного мозга. Но ядром всего механизма взаимодействия анализаторов является рефлекторный путь: постоянные и временные нервные связи между их мозговыми концами.
Е. Н. Соколов предложил объединить все формы межанализаторных связей в две большие группы по их значению в процессах чувственного отражения: активирующие связи и информирующие [293].
Активирующие связи когут быть как безусловно-, так и условнорефлекторные. Они обеспечивают определенный уровень активности анализаторов, не оказывая существенного влияния на содержание чувственных образов. Эти связи проявляются прежде всего в изменении чувствительности анализаторов под влиянием побочных раздражителей. Многочисленные данные показывают, что направление изменения чувствительности зависит от силы побочного раздражителя. Как правило, слабые вызывают ее повышение, сильные— понижение. Установлено, что даже подпороговые раздражители влияют на уровень чувствительности. Изменение чувствительности активируемого анализатора зависит также от его исходного функционального состояния. При низком уровне чувствительности побочные раздражители обычно повышают ее, при высоком — понижают. Влияние побочных раздражителей является двухфазным; во время его действия чувствительность изменяется в одном направлении, после прекращения — в противоположном. При этом она не просто достигает
160
первоначального уровня, а «перекачивается» в другую сторону.
В отличие от активирующих, информирующие связи оказывают прямое влияние на содержание возникающих образов. Сюда относятся разнообразные ассоциации ощущения, их переводы из одной модальности в другую (например,- визуализация осязательных образов) и т. п.
Наряду с указанными группами можно выделить еще одну — викарирующие (замещающие) связи. Они проявляются в случаях замещения некоторых функций одного анализатора другим. Примером может служить замена слуха при его выключении и ограниче: нии вибрационной чувствительностью или зрения осязанием. В этом случае особенно отчетливо проявляется системность в работе чувствующих приборов мозга: выключение или ограничение одного из них приводит к перестройке всей системы.
В процессе развития человека на основе взаимодействия анализаторов формируются функциональные системы, являющиеся механизмом перцептивных действий. Примером таких систем может служить осязание, в котором объединяются аппараты тактильной, температурной, мышечной и суставной чувствительности.
Механизм визуального наблюдения также представляет собой функциональное объединение ряда анализаторов. Его ядром является зрительный анализатор. Но наблюдение не исчерпывается работой только этого чувствующего прибора. В процессе наблюдения неизбежно участвует окуломоторный аппарат, а следовательно, и связанный с ним кинестетический анализатор. Работа последнего играет особенно важную роль в поисковых и глазомерных действиях. В механизм визуального наблюдения включается и общая кинестезия, участвующая в регулировании позы наблюдения. Существенным компонентом данной функциональной системы является вестибулярный аппарат, имеющий самое прямое отношение к формированию координат поля зрения (прежде всего оси «верх — низ»), которые служат основными ориентирами в процессе наблюдения. Как показывают экспериментальные исследования, путем искусственного раздражения вестибулярного аппарата можно менять
11—2286
161
ориентировку поля зрения, создавая, например, иллюзию крена рассматриваемых объектов (Ф. Клике [419]).
Функциональные системы, подобные тем, которые лежат в основе осязания и визуального наблюдения, образуются в процессе естественного развития человека и имеют общий характер. Их структура определяется общими условиями жизни и деятельности человека. В тех случаях, когда человек должен работать в особых условиях (управление самолетом, космический полет и т. п.), возможно возникновение конфликта между сложившимися функциональными системами и новыми требованиями, которые определяются этими особыми условиями. Результатом этого является нарушение пространственной ориентировки, возникновение различных иллюзий и т. п. Чтобы предотвратить подобные нарушения, очевидно, необходимо перестроить сложившиеся функциональные системы или сформировать новые путем специальной тренировки.
Наряду с функциональными системами, имеющими общий характер (и на их основе), у человека в процессе профессиональной деятельности формируются специализированные связи между анализаторами. Так, у телеграфиста образуется специализированная связь между слуховым и зрительным анализаторами, у дегустатора — между вкусовым и двигательным и т. д. Вообще, механизмом любой перцептивной деятельности является функциональная система, объединяющая ту или иную группу анализаторов.
Большое количество «сенсорных» входов человека позволяет передавать ему информацию различными способами. В принципе одна и та же информация при соответствующем кодировании может быть передана через любой анализатор. При этом возможно модулирование -не одного, а нескольких параметров физического процесса, несущего информацию. Так, используя в качестве сигнала оптический раздражитель, мы можем изменять его интенсивность, цвет, положение в пространстве и т. д.1
1 Следует, однако, подчеркнуть, что модулирование сигналов, адресуемых человеку, по любому из параметров имеет свои границы, определяемые характеристиками чувствительности анализаторов. Если сигнал не соответствует этим характеристикам, то он либо будет искажен, либо вообще те будет шринят.
162
Система анализаторов человека является многоканальной и обладает огромными возможностями по приему сигналов. Однако при разработке и конструировании индикационных устройств эти возможности используются далеко не полностью. По сложившейся традиции средства технической сигнализации в основном рассчитываются на визуальный прием. Гораздо реже используется звуковая сигнализация. Остальные анализаторы почти никогда не принимаются в расчет. Бесспорно, зрение занимает в системе анализаторов человека ведущее положение. Бесспорно также и то, что зрительный аппарат обладает наибольшими возможностями по приему сигналов. Однако стремление некоторых конструкторов все сигналы переводить только в визуальную форму вряд ли заслуживает одобрения. Во-первых, надо иметь в виду, что перегрузка зрительного анализатора приводит к его быстрому утомлению, а иногда и расстройству функций. Во-вторых, некоторые стороны и свойства управляемых процессов могут быть лучше отображены в сигналах, адресованных другим анализаторам. В-третьих, даже в том случае, если вся система технической сигнализации рассчитана только на визуальный прием, -практически оператор иногда ориентируется в состоянии управляемого объекта по косвен-дым невизуальным сигналам (по вибрации, запахам и т. д.).
В инженерной 'психологии проведен ряд работ по проблеме разгрузки зрения за счет других анализаторов. В этой связи значительный интерес представляют исследования Флореза и Форбеса [по 363, 441]. Они показали, что пилот может достаточно хорошо управлять самолетом по звуковым сигналам. В экспериментах пилот получал необходимую информацию через головные телефоны с помощью звуков. Сигналами поворотов служили изменения отношения интенсивности звуков, подаваемых в правое и левое ухо. При повороте вправо увеличивалась интенсивность звука справа и уменьшалась слева, и наоборот. Скорость и величина перепадов интенсивности соответствовали скорости и величине поворотов. Здесь была использована слуховая иллюзия движения, описанная выше (стр. 144). В то же время тон изменялся по высоте. Если, делая вираж, самолет кренился на правое крыло, то звук, 'подаваемый на правое ухо, понижал-
11*
163
ся а на левое—повышался. Пилот слышал непрерывный тон, который как бы распространялся вдоль горизонта, создавая иллюзию виража. Для индикации скорости использовались короткие прерывистые сигналы, подаваемые на фоне непрерывного тона. С увеличением скорости они становились более частыми, и наоборот. Экспериментаторы пришли к выводу, что звуковая сигнализация позволяет пилоту достаточно точно оценивать изменения движения самолета.
Весьма интересны также исследования возможности использования тактильной и вибрационной чувствительности. Так, Джелдард разработал систему передачи информации с помощью вибраторов, которые располагались на груди испытуемого [92, 395, 396].
Они подавали сигналы, различающиеся по длительности и амплитуде. В эксперименте использовались ;пять положений вибраторов, три длительности и три амплитуды. Эксперименты показали, что натренированные испытуемые, изучившие определенный «вибрационный» -код для букв и цифр, могли принимать сообщения со скоростью 38 слов в минуту (максимальная скорость приема сообщений, передаваемых о помощью азбуки Морзе, примерно 30 слов в минуту).
Сливинский показал возможность использования тактильной и вибрационной чувствительности в операциях, слежения и наблюдения (по (412]).
Баллард и Хессингер создали электромеханическую тактильную систему управления, которая в принципе могла бы использоваться на самолете (по [412]). Такая система передает пилоту информацию о тангаже и угле крена с помощью тактильных стимуляторов, расположенных на больших пальцах рук. С возникновением крена появляются тактильные сигналы, величина которых соответствует его углу, а локализация (палец правой или левой руки)—направлению. Авторы считают, что созданная ими система, хотя и не позволяет осуществлять тонкое управление в течение длительного времени, все же может быть использована как вспомогательное средство в общепринятых системах управления.
К этому же циклу работ относится исследование Л. В. Филиппова, который, исходя из возможностей тактильного различения простейших форм, создал систему геометрических фигур, легко различаемых и опознавае-
164
мых в момент прикосновения [316, 317]. Эти фигуры были наклеены на клавиши линотипа, заменив изображения букв. После небольшой тренировки по методике, предложенной Филипповым, линотиписты могли осуществлять набор, ориентируясь на тактильные сигналы с минимальным участием зрительного контроля, что привело к заметному повышению точности и скорости действий; полностью исчезли ошибки, обусловленные особенностями зрительного восприятия.
Проблема разгрузки зрения является частью более общей проблемы выбора модальности сигналов и рационального распределения поступающей информации между разными анализаторами. Известно, что каждый анализатор имеет свои преимущества и свои недостатки в отношении приема сигналов. Так, слух имеет некоторые преимущества в приеме непрерывных сигналов, а зрение — в приеме дискретных. Время простой реакции на звук короче, чем на свет, но самая короткая реакция— на тактильный сигнал. Вместе с тем тактильный сигнал может быть передан лишь при непосредственном воздействии на кожную поверхность, а световой или звуковой— на расстоянии. Различна и разрешающая способность разных анализаторов. Они также играют различную роль в рефлекторных реакциях. Например, болевая чувствительность особенно интимно связана с безусловными оборонительными рефлексами, а слуховая — с ориентировочными1, вкусовая и обонятельная — с пищевыми и т. д.
Индикаторы, рассчитанные на визуальный и слуховой прием информации, вряд ли всегда являются наилучшими. В некоторых случаях более целесообразно дл9 приема сигналов использовать другие анализаторы. Например, адресатом сигналов опасности может быть боле вой анализатор. Имея в виду яркую эмоциональнук окраску болевых ощущений, их тонизирующее действш на организм и связь с безусловными оборонительным! рефлексами, можно ожидать, что «болевой индикатор: окажется значительно более эффективным, чем слухово! или визуальный (в сложной обстановке последние могу остаться просто незамеченными). Разумеется, он долже]
1 Звук принадлежит к одгслу сильнейших безусловных стимул* торов ориентировочного рефлекса. Поэтому он особенно часто и< пользуется как предупреждающий сигнал.
16$
применяться с очень большой осторожностью и лишь в тех случаях, когда речь идет об опасности для жизни людей (при попадании в зону радиации, отравляющих веществ, особенно если они не имеют запаха, и т. д.). Как отмечалось, некоторые анализаторы не дают в обычных условиях отчетливо осознаваемых ощущений. Но иногда (например, при управлении скоростными видами транспорта) такие ощущения могли бы быть полезными для деятельности человека. В связи с этим возникает задача разработки технических устройств, которые обеспечили бы искусственную стимуляцию этих анализаторов.
Правильно выбрать модальность сигнала — значит повысить надежность его приема, а следовательно, и работы всей системы управления.
В некоторых случаях средством повышения надежности может быть дублирование сигнала в разных, модальностях: одновременная или последовательная его посылка к разным анализаторам. Это средство особенно целесообразно при передаче сигналов о маловероятных событиях. Правда, надо отметить, что дублирование далеко не всегда дает положительный эффект. Если задача очень сложна и оператор не имеет достаточной тренировки, дублирование сигнала в разных модальностях может вызвать дополнительные трудности (см, гл. 1). Перед инженерной психологией встает задача точно определить, при каких условиях это средство повышает надежность приема сигнала, а при каких снижает.
Наконец, необходимо остановиться еще на одном вопросе. В реальной трудовой обстановке на анализаторы человека действует не только сигнал, несущий информацию об управляемых объектах, но и масса других, побочных раздражителей, которые, как отмечалось, оказывают влияние на всю систему анализаторов. Отсюда вытекает, что при конструировании индикатора недостаточно изучить возможности только соответствующего анализатора, по необходимо учесть и те общие условия, в которых будет работать человек. Так, известно, что сильный шум изменяет чувствительность как хроматического, так и ахроматического зрения. Значит, при конструировании визуального индикатора важно учесть уровень шума в том помещении, где будет работать оператор. Известно также, что чувствительность зрительного
166
аппарата снижается при действии некоторых запахов, высокой температуры и вибрации. Значит, при конструировании того же визуального индикатора важно учесть химический состав воздуха в помещении, где будет работать оператор, уровень температуры и вибрации. Зрительная чувствительность зависит и от позы человека, значит, важно учесть и позу.
Опираясь на известные науке сведения о взаимодействии анализаторов, эту линию рассуждения можно было бы продолжить. Но для того чтобы сформулировать общее требование, достаточно сказанного.
Определяя оптимальный способ сигнализации об управляемых объектах, необходимо по возможности учитывать вою систему раздражителей, действующих на все анализаторы человека, значит, важно учесть и позу. Это требование особенно важно подчеркнуть в связи с тем, что условия труда человека в современном производстве чрезвычайно разнообразны.
Во'прос о взаимодействии анализаторов выступает и в другой связи. Как отмечалось, механизмом любой перцептивной деятельности является функциональная система анализаторов. В конечном счете эффективность приема того или иного сигнала зависит от уровня развития, от слаженности такой системы. Отсюда следует, что, разрабатывая те или иные средства сигнализации, важно также решить и вопрос о том, какая функциональная система должна быть сформирована у оператора для приема сигналов. Этот вопрос особенно отчетливо обнаруживается в тех случаях, когда речь идет о каких-либо специальных условиях труда человека (например, скоростные и космические полеты, подводное плавание и т. д.). Изучение структуры и динамики функциональных систем анализаторов (выявление относительной роли и последовательности включения каждого из них в деятельность по приему сигналов) является предпосылкой эффективной разработки «техники ввода информации».
Вместе с тем знание особенностей и путей формирования функциональных систем необходимо для определения методов обучения операторов и конструирования учебной техники.
167
3
О СПОСОБНОСТИ ЧЕЛОВЕКА
ПРИНИМАТЬ, ПЕРЕДАВАТЬ
И ХРАНИТЬ ИНФОРМАЦИЮ
В гл. 2 речь шла преимущественно о пороговых характеристиках тех материальных явлений, которые способны при воздействии на анализаторы вызвать ощущение. Изучение чувствительности анализаторов в отношении энергетических, пространственных и временных характеристик этих явлений позволяет определить цеко-торые требования к физическому алфавиту сигналов, адресованных человеку.
Однако любой материальный процесс выступает в роли сигнала лишь постольку, поскольку он является носителем информации. Поэтому изучение «сенсорного входа» человека, его возможностей по приему сигналов не может быть сведено только к анализу чувствительности различных анализаторов. Такой подход •раскрывает лишь один аспект этих возможностей: способность ощущать и воспринимать явления, в которых воплощается сигнал.
Другим аспектом является оценка количества информации, которое может быть передано человеку посредством того или иного сигнала. В этой связи инженерную психологию интересуют вопросы об оптимальном количестве сигналов, которые могут быть переданы человеку, об их распределении во времени, о числе измерений сигналов и их «насыщении» информацией, об оптимальном кодировании и т. д.
Чтобы ответить на эти вопросы, необходимо определить способность человека принимать, перерабатывать, сохранять и передавать информацию, поступающую на
168
его «сенсорный вход», воспользовавшись некоторыми понятиями теории информации. В этой связи человек или отдельные звенья его нервной системы рассматриваются как каналы связи. Теория информации первоначально была разработана в связи с потребностями измерения сообщений, .возникшими в технике связи. Она показала, что самые различные сообщения, относящиеся к самым разным вопросам и имеющие самое различное содержание, могут быть переведены на общий язык и измерены некоторой единой мерой. Благодаря этому теория информации вышла за пределы техники связи и проникла во многие области науки, в том числе и психологию.
Исходной величиной для определения численной меры информации является вероятность события.
По определению, принятому в теории информации, полученная информация (Я) равна
г г . вероятность события после приема"сообщеЕшя
И = log —v~ -7 - -z .
55 ьероятпость события до приема сообщения
В случае отсутствия помех вероятность события после приема сообщения равна единице.
За наиболее простой случай принимается такой, в котором вероятность события до приема сообщения равна 72. Полученная информация здесь log2. При двоичном основании log2 — 1. Эта величина и является единицей, численного измерения информации. Она получила название «бит» (от англ. binary digit — двоичная единица). Одна двоичная единица информации соответствует сообщению о том, что произошло одно из двух равновероятных событий.
По своему существу -процессы передачи информации являются процессами выбора из определенного ряда альтернатив. Один бит соответствует выбору из двух равновероятных альтернатив. Чем шире ряд альтернатив, тем больше требуется информации для того, чтобы сделать выбор. Величина информации о любом из равновероятных событий определяется по формуле
H = log,-L. (23а)
где Н — информация о событии; р — вероятность события.
169
В том случае, если события (альтернативы) имеют разную вероятность, информация о каждом из них (индивидуальная информация) может быть найдена по аналогичной формуле
hi = log2-±r> (236)
Рг
где hi — информация об i-ы событии; pi — вероятность *-го события. Однако цля решения многих задач знания об индивидуальной информации недостаточно. Возникает необходимость вычисления среднего количества информации. В этом случае пользуются формулой Шеннона 1
H = fPiloga±9 (24)
й Pi
где И — среднее количество информации; pi — вероятность г-го события.
Формула средней информации ,(24) выводится из предыдущей формулы (236) так же, как и любая другая взвешенная средняя арифметическая.
В идеальном случае информация, принятая адресатом, точно соответствует той, которая поступила от источника сообщения. Однако в реальных системах связи часть информации искажается помехами, а часть теряется при передаче. Поэтому для того, чтобы оценить тот или иной канал связи, важно измерить количество переданной информации. Эта величина определяется по формуле
Т{х,у) = Н(Х) + //м ~ Н{х,у)х (25)
где Т(ХгУ)—мера 'переданной информации;
Я(Х) — информация, поступающая в канал; Н(У) — информация, исходящая из канала; Н(х,у) — информация, содержащаяся в совместном появлении сигналов, поступающих в канал и исходящих из него.
1 При равной вероятности событий величины h (индивидуальная информация) и И (средняя информация) совпадают.
170
Для определения переданной информации может быть применена и другая формула
Т(х9у) = Нм — HuMj (26)
где НУ(Х) — та часть информации, которая потеряна при передаче по каналу связи.
Эта величина называется ненадежностью передачи.
Если информация искажается при передаче, то определяют еще одну величину Ну^х). Ею измеряется «инородная», не относящаяся к делу информация, возникающая из-за помех, или «шум». Эта величина называется неоднозначностью передачи.
Одной из важнейших характеристик передачи информации как процесса, развертывающегося во времени, является скорость. Она определяется количеством информации, переданной за тот или иной промежуток времени,
R = l!*jvL, (27)
где R — скорость передачи информации;
/ — время, в течение которого передается информация.
В зависимости от свойств канала связи скорость передачи информации может быть различна. Существуют каналы, способные передавать (пропускать) значительную по количеству информацию за очень короткие промежутки времени. Но существуют и такие, возможность которых в этом отношении невелика. Та максимальная скорость, с которой тот или иной канал может передавать информацию, называется его пропускной способностью. Она измеряется в битах в секунду. Чем больше пропускная способность канала связи, тем большую информацию можно по нему передать за единицу времени.
Эффективность работы систем управления в значительной степени зависит от того, насколько согласованы ее звенья по показателям пропускной способности. Так, система, состоящая из последовательно соединенных звеньев, будет нормально работать только в том случае, если — по принципу минимума — скорость передаваемой информации не превышает пропускной способности ее
171
наиболее слабого звена. В противном случае неизбежны потери и искажения циркулирующей информации.
Для решения инженерно-'психологических задач весьма важно рассмотреть возможности человека по передаче информации. Однако здесь сразу же возникает вопрос о том, насколько правомерно применять к анализу его деятельности те меры, которые разработаны в теории информации !.
Ответ на этот вопрос в конечном счете зависит оттого, обладают ли психические явления признаками процессов, которые изучаются теорией информации. Как известию, теория информации формальна и применяется только к анализу статистических процессов, развертывающихся во времени. По существу своему информационные процессы избирательны. Они рассматриваются как процессы выбора из определенного ряда альтернатив (при условии, что все возможности выбора известны), включающие «взвешивание» вероятностей каждого события.
То, что психические процессы протекают во времени, является общепризнанным и подтверждается экспериментально. Требование изучать их во временном контексте уже давно стало методическим правилом.
1 Единой точки зрения среди психологов но этому вопросу еще пет. Одни исследователи пытаются применять эти меры всюду, полагая, что они могут служить в психологии основным средством количественного анализа. Другие относятся к ним более осторожно (а иногда -и просто отрицательно), указывая .на ограниченность информационных мер и па необходимость прежде всего качественного анализа. Надо отметить, что пока применение этих мер оказалось результативным при изучении лишь очень ограниченного круга явлений (в основном дизъюнктивных реакций и актов идентификации). Попытки их применения к другим моментам деятельности человека наталкиваются на значительные трудности.*
По чисто лревходящшм причинам в шеихологии применяются преимущественно шепноновские меры (неопределенности и количества информации. Однако они, несмотря на строгую обоснованность и изящность, «не исчерпывают iBcero математического аппарата, который может быть применен к проблемам передачи, приема, переработки и хранения информации. Очевидно, при изучении психических явлений нельзя ограничиваться только одной из количественных мер информации, необходимо более широкое привлечение и других средств из современного математического аппарата. Чтобы в шолную меру оцепить силу и границы методов теории информации, требуется еще большая совместная работа психологов и математиков.
172
Новейшие исследования по проблемам восприятия, узнавания, сенсомоторных реакций показывают, что одним из компонентов деятельности нервной системы является аппарат статистической обработки поступающих сигналов, своеобразный «счетный» механизм, «использующий» принципы статистики.
Он был выявлен в деятельности воспринимающих систем мозга. Его существенная роль в процессах восприятия состоит в том, что, оставляя нетронутым порядок поступающих сигналов, статистический аппарат усиливает различия между возбуждениями, которые вызываются внешним воздействием, и «спонтанными» возбуждениями. Благодаря этому поступающие сигналы дифференцируются о г «собственных шумов» нервной системы. Статистическая обработка входных сигналов обеспечивает повышение способности различения, особенно пространственного (например, увеличение остроты зрения), участвует в процессах адаптации, сенсибилизации и характеризует также некоторые другие стороны деятельности анализаторов (И. Колер [420]).
На «использовании» нервной системой статистических закономерностей основана перестройка сенсорных приборов и выработка экономных и надежных способов восприятия и опознания в процессе перцептивного научения (Е. Н. Соколов [294], И. Колер [420], X. Франк и др.). По экспериментальным данным ряда авторов, статистическая обработка сигналов является также существенным моментом процессов запоминания, образования сепсомоторных связей,, формирования механизмов антиципации и т. д. (С. Голдмап [78], Ф. Эттнив (340], Ф. К. Фрик [391], В. Е. Хик [409], К- Купфмюллер [424], Дж. А. Миллер [448], М. Стриженец [483], X. И. Ландер и др.).
Поскольку сама нервная система обладает «счетным механизмом», работа которого подчиняется статистическим закономерностям, логично заключить, что методы теории информации являются адекватным средством ее изучения.
Однако применение информационных мер к анализу психических процессов сталкивается с целым рядом трудностей. Прежде всего, несмотря на значительное количество психологических исследований, . проведенных с позиций теории информации, все еще нет ясного отве-
173
fa на основной методический вопрос: как подсчитывать информацию, принимаемую и перерабатываемую нервной системой?
Количество информации, содержащейся в каком-либо состоянии сигнала, является величиной относительной и зависит от общего числа его возможных состояний. Информация, приходящаяся на символ, определяется длиной всего алфавита. Чем длиннее алфавит, тем больше средняя информация на символ ].
Пожалуй, наиболее трудный вопрос для психологических исследований — это вопрос о том, как определить алфавит в каждом конкретном случае.
Предположим, что человек воспринимает некоторый незнакомый предмет. Чтобы вычислить, сколько информации он получил, надо знать, какова длит а алфавита, т. е. надо знать общее число всех существующих предметов и вероятность встречи человека с каждым из них. Поскольку наука не располагает такими знаниями, исследователи вынуждены идти по пути ограничения задачи и вводить различные допущения.
Одни из них исходят из того, что всякий а#т восприятия есть отнесение конкретного объекта к какой-то категории (В. Д. Глезер и И. И. Цуккерман [77], Г. С. Шик-лай {485]). Так как число категорий может быть подсчитано, хотя бы приблизительно, то это несколько облегчает дело. Но остается неясным вопрос о том, какова вероятность встречи каждого человека с 'предметом каждой категории. Делается второе допущение: предполагается, что эти вероятности примерно равны2. Как будто бы при таких допущениях задача решается. Но этот путь вызывает ряд серьезных возражений. Во-пер-
1 Отдельное состояние сигнала называется -символом (буквой), а вся их совокупность — алфавитом.
2 В последнее время некоторые авторы стали различать «объ ективную вероятность» и «субъективную вероятность», которые в конкретных актах поведения человека могут значительно расхо диться. По данным экспериментального исследования X. Франка, субъект, приступая к какой-либо незнакомой задаче, исходит из допущения (осознанного или нет) о равенстве вероятностей всех событий. Между тем по условиям задачи они могут оказаться раз личными, и тогда 'В первых попытках решения задачи субъект де лает массу ошибок. Но с опытом, 'благодаря работе статистиче ского аппарата, «заложенного» в нервной системе, «субъективная вероятность» (начинает приближаться к «объективной». Поведение становится адекватным условиям задачи.
174
вых, хотя восприятие, во всяком случае развитое, и включает момент отнесения объекта к категории, оно не исчерпывается этим моментом. Более того, категориаль-но'сть восприятия является не основной, а производной чертой, возникающей лишь на сравнительно высоких ступенях развития. Во-вторых, сенсорное обобщение, характерное для восприятия, далеко не всегда осуществляется на основе тех же признаков, что и логическое. Поэтому задача отнесения того или иного предмета к какой-то категории часто оказывается трудной. В-третьих, если принять допущение о равенстве вероятностей встречи человека с предметом любой категории, то отсюда следует, что при восприятии любого предмета он получает одно и то же количество информации. По тогда снимается вопрос о зависимости объема получаемой информации от индивидуальных свойств предмета. Короче говоря, рассматриваемый способ вряд ли можно признать адекватным для той задачи, ради решения которой он был разработан. Любой реальный акт восприятия всегда является отражением конкретного предмета в совокупности его индивидуальных свойств. Но те допущения, -приняв которые только и можно пользоваться данным способом, не позволяют учитывать этот весьма существенный признак восприятия. В лучшем случае данный способ может быть применен как средство количественного анализа только процессов категориального узнавания, но не восприятия.
Другой способ подсчета информации, поручаемой человеком в актах восприятия, заключается в том, что за основу алфавита 'принимается число градаций отдельных признаков предмета, которые человек в состоянии различить. Исходя из характеристики различительной чувствительности, можно составить шкалу для каждого ощущаемого свойства, которая и явится алфавитом, а ее элементы— символами. Так, если человек различает около тысячи оттенков яркости, то ощущение какой-то определенной яркости дает ему информацию примерно в 10 бит. Если различимых цветов около полутораста (при максимальной насыщенности), то ощущение цвета дает несколько более 7 бит и т. д. Информация, получаемая при восприятии какого-либо предмета, находится как сумма информации, передаваемых каждым признаком. Этот способ, казалось бы, позволяет учитывать специфику
175
сенсорных процессов, поскольку он берет за основу акты различения, а не опознания. Но при ближайшем рассмотрении оказывается, что здесь различение тоже подменяется опознанием, но только опознанием отдельных свойств, а не целостных предметов. Кроме того, учесть вероятность появления каждого свойства нисколько не легче, чем вероятность предмета. Наконец, этот способ игнорирует такие важнейшие «особенности восприятия, как целостность и структурность, поскольку предполагается, что образ предмета является просто суммой ощущений, отражающих отдельные свойства.
В лучшем случае данный способ может быть применен для количественного анализа актов различения, включающих опознание, но не восприятия.
Хорошо известно, что решающую роль в процессах восприятия играют форма п контур предмета. Поэтому не случайно многие исследователи (Б. В. Барский и М. А. Гузева [42], С. Голдман [78], Е. Н. .Соколов [294] и др.) направили свои усилия па поиски таких способов, которые позволили бы подсчитывать информацию, получаемую человеком при отражении контура. Здесь наметилось несколько линий. Одна исходит из представления о поле восприятия как матрице, состоящей из элементов (ячеек), величина которых соответствует некоторым психофизиологическим «параметрам» анализаторов '(например, углу зрения). Здесь каждый элемент матрицы является символом, а их общее число определяет длину алфавита. Объект при восприятии как бы накладывается на матрицу и тем самым разбивается на точки. По числу точек и распределению их вероятностей находится информация, получаемая человеком при восприятии объекта (С. Голдман [78]) 1. Такой способ вполне применим к системам, в которых изображение строится либо по принципу фотографирования, либо по принципу строчной развертки. Однако построение психического изображения (ощущения, восприятия) осуществляется по иным принципам. Поэтому вряд ли можно распространять этот способ на деятельность воспринимающих аппаратов.
1 Это лишь грубое изложение данной точки зрения. В действительности авторы, разрабатывающие далпый способ, учитывают, что каждый элемент может иметь множество состояний, что, конечно, влияет на длишу алфавита. Учитываются также и 'статистические связи между точками объекта.
176
Другая линия связана с представлениями о радиальной развертке как механизме построения изображения. Для оценки информационного содержания контура измеряется частота и количество его «перепадов» относительно некоторой точки (например, относительно центра тяжести плоской фигуры). Этот метод разработан инженером Б. В. Барским .[42]. Он был использован в нашей лаборатории для изучения зависимости пространственных порогов видения от информационного содержания контура плоской фигуры. Эксперименты показали, что эта зависимость приближается к линейной [. Мы считали возможным применение метода Барского к изучению зрительного восприятия, исходя из того, что развертка изображения, осуществляемая глазом, имеет некоторую аналогию с радиальной. При первичном знакомстве с предметом глаз как бы идет по контуру предмета, «снимая» основную информацию именно в точках «перепада».
Можно предполагать, что этот метод окажется эффективным при изучении движения рецепторпых аппаратов (прежде всего глаза и руки) в процессе восприятия и позволит выявить зависимость величины, частоты и скорости парциальных движений от количества информации, передаваемой контуром. Вместе с тем изучение движений позволит внести коррективы и усовершенствовать самый метод. Но пока ясно одно: и этот метод — в том виде, как он сформулирован автором, — не может быть использован для количественного анализа структурности и целостности восприятия.
На представлении о зрительном восприятии как последовательном обведении контура основан также метод, предложенный В. А. Ганзеном и Р. М. Грановской [69]. Количественная оценка информационного содержания контура по этому методу учитывает три характеристики-
число, показывающее, сколько раз на контуре кривизна меняет знак;
число криволинейных участков контура;
сумму абсолютных приращений угла наклона касательной.
1 Работа выполнена сотрудниками лаборатории М. Л. Гузевой, Л. J-I. Фоменко, Л. И. Барановой и Б. >В. Максимовым.
12—2286
177
Авторы дали сравнительную оценку сложности ряда плоских фигур, применяемых в некоторых системах знаковой индикации. Эти же фигура были использованы в качестве экспозиционного материала в экспериментах нашей сотрудницы М. К. Тутушкиной, которая определяла пороговое время их восприятия, необходимое для точного воспроизведения. Сравнение экспериментальных данных (пороговое время) и расчетных (степень сложности контура) показало, что имеется соответствие между ними. Это как будто бы свидетельствует о правомерности предложенного метода для оценки информации, получаемой -в процессе восприятия. Однако нужно отметить, что этот метод применим лишь в тех случаях, когда происходит последовательное обведение контура. Между тем хорошо известно, что глаз далеко не всегда действует по такому принципу даже при первичном восприятии незнакомых контуров. Возможно, этот принцип является, скорее, исключением, чем правилом.
Итак, даже такая, казалось бы с первого взгляда простая задача, как определение количества информации при восприятии предмета, пока не может быть однозначно решена с помощью существующих способов. Если применить к этой задаче все перечисленные способы, то мы получим величины, значительно различающиеся между собой. Каждый из способов разработан на основе целого ряда чисто логических предположений и допущений, но не на основе знаний природы тех процессов, к которым его хотят применять. Эффективным будет только тот способ, который адекватен природе изучаемых явлений. Создание такого способа — дело будущего, и оно может быть осуществлено только при условии совместной работы математиков и психологов.
Обычно при подсчете информации исходят из того, что система, которая ее принимает и перерабатывает, действует по принципу последовательной дихотомии, осуществляя серию выборов из некоторого множества. При этом предполагается, что все возможности выборов ей известны. Это значит, что алфавит заложен в систему заранее. В какой мере мы можем считать эту схему пригодной для анализа психических процессов? Работает ли нервная система по принципу дихотомии? Можно ли рассматривать восприятие, запоминание, узнавание и т. д. как акты выбора? Ответов на эти вопросы еще
178
нет. Пока данная схема была удачно применена к анализу лишь очень, узкого круга явлений: к актам идентификации, опознания и к реакциям выбора. В экспериментах по изучению актов этого рода человек заранее знакомится с полным набором стимулов (усваивает алфавит), а затем на каждый из них должен отвечать определенным образом. Значит, здесь уже самая постановка задачи предполагает такую организацию действий человека, которая строится по принципу-выбора.
Применение информационных мер дает в этих случаях достаточно четкие результаты. По-видимому, мы пока вправе пользоваться формулами теории информации лишь при изучении тех процессов, которые строятся по принципу выбора из множества символов, более или менее прочно усвоенных человеком. Расширение сферы их применения требует целого ряда уточнений, дополнений и допущений, а возможно, и использования некоторых новых принципов.
Одно из первых психологических исследований, в котором были применены методы информационного анализа, выполнено X. В. Хейком и В. Р. Гарнером i[404]. Оно посвящено вопросу точности идентификации пространственного положения указателя на линейной шкале 1. Шкала имела лишь две конечные отметки «О» и «100», и от испытуемого требовалось идентифицировать позицию указателя между ними,, не пользуясь никакими объективными средствами измерения. Число альтернативных позиций варьировало от 5 до 50. Оказалось, что в этих условиях человек может точно идентифицировать не более 9 позиций, т. е. осуществлять выбор не более, чем из 9 альтернатив. Если число альтернатив в эксперименте увеличивалось, испытуемый начинал ошибаться. При
1 Обычно при изучении актов идентификации попользуется методика так называемых «абсолютных суждений», суть которой заключается в следующем: выбирается некоторый ряд стимулов, и каждому из них приписывается какое-то «имя» (например, число). Затем испытуемый заучивает «имена», относя их к стимулам. После этого стимулы демонстрируются в случайном порядке, и испытуемый должен 'называть каждый из них. По количеству правильных и ошибочных ответов судят о точности идентификации. Нетрудно видеть, что эта методика ставит испытуемого, знающего полный «алфавит» стимулов, в ситуацию выбора. Поэтому-то именно методика «абсолютных суждений» нашла наиболее широкое применение в экспериментах по изучению .способности человека принимать и передавать информацию.
12*
179
"переводе в единицы информации это значит, что посредством одномерного 1 стимула человеку может быть передано всего лишь около 3,25 бит.
Позднее вопрос о 'предельном количестве информации, передаваемой человеку одномерным стимулом, стал предметом целой серии специальных исследований.
Одну группу составляют исследования идентификации визуальных стимулов. Изучались акты идентификации простых геометрических фигур (квадратов) по их площади (С. В. Эриксен и X. В. Хейк [386]), линий (И. Поллак и Е. Т. Клеммер [464]), цветов (Чапанис и Р. Хэлси [364]), яркостей (Эриксен [385]).
В другой группе исследований вопрос о предельном количестве информации, принимаемой человеком, изучался на примере акустических стимулов, индеитифи-цируемых по высоте (Поллак [461—462J) и по громкости (В. Р. Гарнер [392]).
Изучалась также возможность точной идентификации вкусовых (И. Г. Биби-Сентер, М. С. Роджерс, Д. Н. О'Коннел [346]) и вибрационных (Ф. А. Джелдард [395]) стимулов.
Чтобы сопоставить воспринимающие аппараты человека по их предельным возможностям принимать информацию, передаваемую одномерными стимулами (в актах идентификации), 'сведем экспериментальные данные в единую табл. 4.
Как видно из таблицы, наиболее высокими возможностями по приему информации обладает зрение, затем следуют слух, кожно-мехаиический анализатор и вкус. При этом наблюдаются значительные различия информационной емкости одного и того же анализатора в отношении идентификации разных признаков сигнала. Так, визуальные стимулы наиболее точно- идентифицируются по цвету и положению в одномерном пространстве, слуховые—по высоте, тактильно-вибрационные—по положению на кожной поверхности.
Обобщая полученные данные, Дж. А. Миллер установил, что предельные возможности человека передавать информацию при опознании (идентификации) одномер-
1 Одномерным называется стимул, который изменяется только в одном измерении. В описанном эксперименте таким измерением было положение стимула на линейной шкале.
180
ТАБЛИЦА 4.
Предельное количество информации, передаваемое стимулами разных модальностей (в экспериментах по идентификации)
|
Варьируемый признак стимула |
Переданная информация, бит |
|
|
Модальность |
при коротких Э КС ПОЗИЦИЯХ |
при длинных экспозициях |
Авторы |
|
Визуальные стимулы |
Положение точки (указателя) на прямой линии (на линейной шкале) |
3,25 2,75 3,2 |
3,9 |
Хейк и Гарнер [404] В. И. Мак-Гилл [437] Коонен и Клеммер [371] |
|
Длина прямой линии |
2,6 | |
3,0 |
Поллак и Клеммер [464] |
|
Направление (угол наклона) прямой линии |
2,8 |
3,3 |
То же |
|
Кривизна дуги (при константности ее длины) |
2,2 [ |
|
" |
|
Кривизна дуги (при константности ее хорды) |
1,6 |
|
" |
|
Площадь простых , геометрических фигур |
1 2' |
0 2,2 |
Эриксен и Хейк [386] |
|
2,6 1 |
2,7 |
1 [оллак и Клсммср [464] |
|
|
Цвет |
| |3,1 | Эриксен [385] |
||
|
|
3,1 |
Чапанис и Хэлси [364] |
|
Акустические |
Яркость | | 2,3 | Эриксен [385] |
|||
стимулы |
Частота (высота) чистого тона |
|
2,2 —2,5 |
| Поллак [461, 462] |
|
1 Интенсивность 1 (громкость) чистого [тона 1 |
2,3 |
Гарнер [392] |
|
Вкусовые стимулы |
Концентрация раствора поваренной соли |
|
1,9 |
Биби-Сонтср, Роджерс и 0* Коннсл [346] |
Тактильно-вибрационные сти- |
Интенсивность вибраций |
|
2,0 |
Джслдард [395] |
мулы (в области груди) |
Длительность вибраций |
|
2,3 |
То же |
|
Место (локализация) [вибраций |
|
2,8 |
• |
181
ных стимулов определяются величиной всего в несколько битов, б ранге от 1,6 до 3,9 бит. Применяя к этим данным формулы статистики, он нашел среднюю величину, равною 2,6 бит. Среднее квадратическое отклонение составляет 0,6 бит. По большинству данных число точно идентифицируемых альтернатив находится в пределах 5—9. Исходя из этого, Л^иллер сформулировал известное положение, согласно которому предельное количество точно идентифицируемых стимулов (альтернатив) равно 7±2 (правило «Seven plus or minus Two» [449]).
Если сопоставить данные, приведенные в таблице, с характеристикой различительной чувствительности анализаторов (см. гл. 2), то обнаруживается нечто общее. Можно заметить, что, чем выше дифференциальная чувствительность по отношению к какому-либо признаку стимула (раздражителя), тем большая информация может быть передана с его помощью. Это указывает на интимную связь процессов опознания и различения.
Вместе с тем число точно идентифицируемых стимулов значительно меньше, чем число различаемых стимулов: здесь — единицы, там — сотни и тысячи. К сожалению, психология пока еще не располагает удовлетворительными концепциями, которые могли бы объяснить столь значительные расхождения. Но ясно одно: этот факт свидетельствует о неправомерности отождествления процессов различения и опознания. , Между этими процессами нет, конечно, непроходимой границы. По экспериментальным данным узнавание объекта повышает скорость и точность различения его признаков. Это объясняется, видимо, тем, что в данном случае различаемые признаки соотносятся с той «субъективной шкалой» (представлениями), которая хранится в памяти воспринимающей системы. «Субъективная шкала» является как бы некоторым дополнительным средством измерения вновь поступающих сигналов. С другой стороны, в любой акт опознания так или иначе включается и процесс различения. В экспериментах по изучению идентификации обычно используют стимулы, различающиеся весьма значительно. Но если эти различия сокращаются (сжимается диапазон варьирования признака стимула), то точность опознания снижается (Эттнив [340]).
По экспериментальным данным на точность и ско-
182
рость опознания стимулов значительное влияние оказывает фактор их различимости (А. Н. Леонтьев и Е. П. Кринчик [183], Е. Кроссман [374], И. А. Леонард [428], а также упомянутые в предыдущей главе работы Дмитриевой и Бутовой).
Однако имеющиеся данные не позволяют делать определенные выводы о взаимосвязи процессов различения и опознания. Здесь требуются специальные экспериментальные исследования. Есть некоторые основания ожидать, что работа в этом направлении позволит подойти к решению вопроса о способах измерения информации, принимаемой человеком в процессе не только опознания, по и различения стимулов, т. е. иначе говоря, о количественном учете так называемого фактора их различимости.
Все, что говорилось выше, относится к опознанию лишь одномерных стимулов. Между тем в реальных условиях человеку приходится иметь дело со стимулами, число измерений которых гораздо больше одного. Логично предположить, что с помощью многомерных стимулов человеку может быть передана и большая информация. Это предположение было проверено экспериментально рядом авторов. В экспериментах Клеммера и Фрика [418] перед испытуемыми ставилась задача идентификации точек, расположенных в двухмерном пространстве. Методика заключалась в следующем: па экране па короткое время появлялся квадрат с одной или несколькими точками. После этого испытуемый должен был воспроизвести их положение в квадрате, укрепленном па специальном щите. Оказалось, что даже в том случае, когда на экране появлялась только одна точка, испытуемый мог достаточно точно идентифицировать 24 ее положения, т. е. передавалась информация, равная 4,4 бит. Это значительно превышает величины, установленные для одномерных стимулов. Таким образом, включение второго измерения (позиция точки определялась в двух координатах) сразу же привело к увеличению количества переданной информации. Правда, полученная величина оказалась меньшей, чем та, которую можно было бы ожидать, исходя из приведенных выше данных Хейка и Гарнера. Если информация, которая передается точкой, изменяющей положение в одном измерении, составляет 3,25 бит, то, казалось бы, включение второго изме-
183
рения должно увеличить информацию вдвое (до 6,5 бит). Между тем она оказалась равной 4,4 бит.
В последующих экспериментах Клеммер и Фрик увеличивали количество точек па экране, вводя тем самым новые измерения в «сигнальное пространство» 1. При восьмимерпом «сигнальном пространстве» человек мог достаточно точно идентифицировать более двухсот позиций, занимаемых четырьмя точками. По данным Клем-мера и Фрика, в этом случае человек способен принять информацию, равную 7,8 бит.
Поллак и Клеммер [464] изучали зависимость передаваемой информации от числа измерений сигнала на примере идентификации контурных фигур, заполненных точками. Результаты экспериментов показали, что увеличение передаваемой информации почти пропорционально увеличению логарифма числа его измерений. Так, например,- при удвоении числа координат она увеличивается па 1,7 бит независимо от того, удваиваем ли мы одну координату и получаем две или удваиваем две и получаем четыре. Зависимость, обнаруженная Полла-ком и Клеммером, представлена графически (рис. 33). На этом же графике отмечены (крестиками) величины, полученные Клеммером и Фриком.
Аналогичные результаты были получены также в экспериментах по изучению идентификации многомерных акустических (Поллак и Фикс [463]), вкусовых (Биби-Сентер, Роджерс и О'Копнел [346]) и световых (Хэлси и Чапаиис [364]) стимулов.
Эксперименты выявили общую тенденцию зависимости передаваемой информации от количества измерений стимула. Она заключается в том, что дополнение к стимулам независимых переменных увеличивает их информационную емкость, т. е. число состояний сигнала, которые могут быть точно опознаны человеком, а значит, и 'передать ему информацию'2.
1 Если для определения одной точки в квадрате требуются две координаты, то для определения двух точек — четыре, трех — шесть, четырех — восемь и т. д.
2 Информационная емкость понимается в теории информации как способность системы хранить или передавать информацию. Согласно Хартли она оценивается логарифмом числа возможшых состояний системы. При этом, конечно, имеется -в виду, что система различает эти -состояния,
184
Интересно отметить, что информационная емкость сигнала увеличивается даже и в том случае, если изменения его параметров не независимы [385, 386].
Отметим, что общее количество информации, передаваемое многомерным стимулом, всегда меньше суммы тех количеств, которые передаются каждым из его изме-

Число координат (6 лог. масштабе)
Рис. 33. Переданная информация как функция числа «координат сигнального пространства» (О—по /Поллаку и Клеммеру; X — по Ююммеру и Фрику);.
рений. Иначе говоря, увеличение возможностей воспринимающих аппаратов по отношению к многомерным стимулам сопровождается в то же время их снижением в отношении каждого измерения стимула, взятого в отдельности К
Данный факт свидетельствует о том, что интеграция информации, получаемой при опознании (надо полагать, и при различении) предметов, осуществляется по принципу, отличному от простого суммирования.
Этот принцип может быть выявлен лишь на основе изучения природы тех процессов, посредством которых осуществляются прием и переработка информации в ана-
1 Миллер считает, что эта особенность воспринимающих аппаратов организма обусловлена биологически. «Чтобы выжить в постоянно меняющейся среде, — пишет он, — лучше иметь немного информации о массе вещей, чем массу информации о маленькой части окружения» [449]. Эта точка зрения, по-видимому, не лишена основания.
185
лизаторпых системах организма. Главной здесь становится проблема механизмов формирования и динамики образа (частично она будет рассмотрена в следующей главе). Решение этой проблемы позволит внести необходимые коррективы в способы количественного описания процессов приема и интегрирования информации, поступающей па «сенсорный вход» человека.
Как видно из приведенных данных, информация, которую человек может принять при опознании как одно-, так и многомерных стимулов, не превышает 10 бит. Однако эти величины справедливы лишь по отношению к тем случаям, когда человек решает задачу идентификации стимулов, не пользуясь никакими объективными мерами. Единственным «измерительным инструментом» здесь является та субъективная шкала отражаемых параметров стимула, которая сформировалась у него в опыте чувственного измерения. Исследователи отмечают, что наиболее легко опознаются стимулы, расположенные в начале и конце предъявляемого ряда. Напротив, средние стимулы опознаются хуже. По-видимому, крайние стимулы выступают в роли своеобразных точек отсчета, относительно которых оцениваются и все остальное. Если в середину ряда включаются дополнительные стимулы, которые могут служить объективными точками отсчета, то количество передаваемой информации заметно увеличивается. Так, Поллак [461, 462] изучал влияние предъявления стандартного топа среди ряда тонов, оцениваемых испытуемым. Он' показал, что, когда в качестве стандарта использовался шестой из девяти тонов, перенумерованных в порядке возрастания по частоте, количество передаваемой информации увеличилось с 2,19 до 2,67 бит. Но если стандартный тон находился ближе к концу ряда, его влияние было менее эффективным.
Можно предположить, что объективные точки отсчета разбивают весь ряд опознаваемых стимулов на части. При этом каждая из частей становится как бы самостоятельным рядом, по отношению к которому действует общее правило. Например, имеется ряд А—5, в котором человек точно идентифицирует 5 стимулов. Разобьем этот ряд точкой В на две части А—В и В—Б. Тогда человек будет способен точно опознавать по 5 стимулов в каждой части, значит — всего 10. Количество переда-
186
ваемой информации увеличивается на 1 бит1. Дробя этот ряд на все большее число частей, можно увеличить количество опознаваемых стимулов, приближая его сколь угодно к количеству различаемых стимулов. Таким образом, включение дополнительных точек отсчета, т. е. использование объективной шкалы, позволяет увеличить информацию, передаваемую одним и тем же рядом стимулов.
Приведенные данные представляют интерес для инженерной психологии прежде всего в связи с задачей определения допустимой длины алфавита сигналов, адресуемых человеку, а следовательно, и их «насыщения» информацией. На основе этих данных могут быть сформулированы некоторые общие положения, которые следует учитывать при разработке средств и способов индикации.
1. Возможности разных анализаторов человека по приему информации различны, поэтому и допустимая длина алфавита должна определяться в зависимости от модальности сигналов. Следует иметь в виду, что макси мальная информация, передаваемая сигналами любой данной модальности, зависит от того, какие их пара метры (измерения) используются.
Величина максимальной информации, которую может передать сигнал, является функцией числа его измерений, различаемых человеком. Отсюда следует, что, чем большей информацией насыщен сигнал, тем большим числом измерений он должен обладать. Иначе говоря, увеличивая насыщение сигнала информацией, мы должны увеличивать и число его опознавательных признаков, если хотим, чтобы информация была принята человеком 2.
Длина алфавита сигналов, адресуемых человеку, может быть увеличена путем включения в их ряд допол-
1 Так как число опознаваемых стимулов зависит, хотя и незна чительно, от длины всего 'ряда, то действительная шрибавка долж на быть несколько меньше 1 бит. В ряду акустических стимулов она равна, по Поллаку, примерно 0,5 бит. По-видимому, .величина при бавки должна зависеть .и от того, какие -параметры стимула исполь зуются.
2 Изучение зависимостей между «насыщенностью» сигнала ин формацией и необходимым числом его опознавательных признаков является одной из важнейших проблем инженерной психологии.
187
нительных точек отсчета. Иначе говоря, если человек должен оперировать со значительной по объему информацией, целесообразно, а иногда и просто необходимо использовать объективные шкалы (разного рода отметки, системы стандартных сигналов, их группировку и т. д.).
Как уже отмечалось, наиболее важной характеристикой канала связи является его -пропускная способность, которая определяется по максимальной скорости передачи информации. Здесь уже необходимо обратиться к анализу временных характеристик деятельности человека. В экспериментальной психологии имеется немало данных о временных порогах ощущения, восприятия, опознания, о времени простых и сложных реакций и т. д. Эти данные и явились исходными для целого ряда работ, в которых исследователи пытались найти максимальную скорость передачи информации человеком *.
В первых исследованиях, ведущихся в- этом направлении, была выявлена линейная зависимость между латентным периодом дизъюнктивной реакции и величиной информации, содержащейся в одномерном визуальном стимуле (см. гл. 1). Позднее было показано, что этот вывод справедлив и в отношении многомерных визуальных и акустических стимулов (Л. А. Сагал [279], Е. И. Арчер[339]).
На основании полученных данных можно было заключить, что максимальная скорость передачи информации человеком является в среднем постоянной. Ее стали 'рассматривать как показатель пропускной способности.
За последние годы появилось значительное число работ, в которых предпринимались попытки измерения максимальной скорости приема, переработки и передачи информации человеком. Интерес к этому вопросу вполне понятен, если иметь в виду, что точное знание величины пропускной способности позволило бы решить целый ряд не только теоретических, по и практических задач, осо-
1 Использование такой меры, как скорость переработки информации, при изучении реакций удобно в том отношении; что она позволяет дать интегральную оценку, включающую как время, так н точность реакции.
188
бенно тех, которыми занимается инженерная психология. Совершенно ясно, что работа системы «человек — машина» будет достаточно надежной и эффективной только в том случае, если скорость информации, поступающей от машины (иначе говоря, производительность источника сообщений), не превысит пропускной способности «сенсорного входа» человека, а требуемая скорость ввода команд в машину — пропускной способности его «моторного выхода». Знание пропускной способности является одним из основных условий решения задачи согласования машинных звеньев системы управления с характеристиками человека-оператора.
Однако с развитием исследований возникло значительное расхождение данных. Согласно Хику [409], который начал изучение этого вопроса, пропускная способность равна примерно 5 бит/сек. По данным Дж. С. Миллера [451], максимальная скорость передачи информации индивидуально варьирует, но в среднем равна 4,5— 6 бит/сек. Фиттс и др. [388] указывают величину 10— 12 бит/сек. X. Франк считает, что она равна 16 бит/сек. Если же иметь в виду, что поступающая информация некоторое время (порядка 10 сек) хранится в непосредственной памяти, то, по мнению Франка, надо признать, что в каждый данный момент в сознании человека находится около 160 бит. Надо, впрочем, отметить, что в непосредственной памяти сохраняется далеко не вся вход-пая информация. По данным Сперлинга [475], полученным при анализе зрения, человек способен получить такое количество информации, которое в три раза превышает объем его непосредственной памяти. Но ограниченность памяти ставит границы и для восприятия. Приняв эту поправку, надо сократить величину, указанную Франком, примерно до 60 бит/сек [(16 бит/секХ9 сек):3 + + 16 бит/сск = 64 биг /сек].
Кастлер и Вульф, определяя скорость передачи информации при игре на фортепиано, получили максимальную величину 22 бит/сек. По мнению Дж. Л. Миллера [449], высший предел практически около 25 бит/сек. Ф. Эттиив [340], обработав данные экспериментов Самой и Поллака, изучавших скорость чтения вслух, указывает величину 35 бит/сек. Он отмечает также, что максимальная скорость передачи информацнн изменяется с изменением числа альтернативных выборов. По Купф-
189
мюллеру [424], максимальное значение потока информации, которую может обработать человек, лежит в районе 50 бит/сек. Систематизировав некоторые данные, он приводит значения, полученные при исследовании различных видов человеческой деятельности (рис. 34). По данным В. Д. Глезера и И. И. Цуккермапа [77], пропускная способность только зрительной системы равна 50— 70 бит/сек.
£
50 |
|
|||||||
40 3D 23 <■ VI 10 J |
— гт- . _ .. |
|||||||
|
|
|
||||||
Л |
гт |
i~f |
I т |
1- |
— |
:=_-_—:г^ |
||
|
|
|
||||||
|
|
|
|
|
|
Т "П ._ |
||
12 3 4 5 6 7 8
Вид деятельности,
Рис. 34. Максимальные значения информации, передаваемой человеком в разных видах деятельности (по Купфмюллеру): 1 — чтение «про себя»; 2 — громкое чтение; 3 — корректорская работа; 4 — печатание на машинке; 5 —игра на фортепиано; 6 — сложение двух цифр; 7 — умножение двух цифр; 8 — счет предметов.
Частично расхождение полученных данных может быть объяснено тем, что разные авторы пользовались разными методами подсчета, о чем говорилось выше. При этом надо иметь тз виду, что к трудности расчета количества передаваемой информации добавляется еще и трудность расчета времени се передачи. Исследователи решали этот вопрос по-разному. Одни брали в качестве временной меры интервал между моментом предъявления сигнала и началом ответной реакции, т. е. ее латентный период. Другие—минимальное время экспозиции сигнала, необходимое для того, чтобы получить адекватный ответ. Третьи предъявляли испытуемому целый ряд сигналов, определяли время их пере-
190
дачи, а затем вычисляли среднее время на передач у одного сигнала. Естественно, что, применив эти методы к решению одной и той же задачи, они не могли получить равные величины.
Но дело 1не только в методах расчета. Пожалуй, главная причина расхождения данных в том, что в экспериментах перед испытуемыми ставились разные задачи, а значит, и способы их деятельности были различны. Здесь мы снова сталкиваемся с необходимостью анализа природы тех процессов, посредством которых осуществляются прием, переработка и передача информации человеком. Зависимость пропускной способности от способа организации деятельности может быть проиллюстрирована па примере работы человека с печатным текстом. Данные, приведенные в диаграмме (см. рис. 34), показывают, что при корректировке текста принимаемая информация равна примерно 18 бит/сек, при обычном громком чтении 30 бит/сек, а при чтении про себя принимаемая информация доходит до 45 бит/сек. Психологически все эти три вида деятельности различны.
Для корректорской работы характерно аналитическое чтение, при котором человек раскладывает каждое слово на составные элементы (буквы) и сравнивает его написание с эталонами, хранящимися в памяти. Здесь основная задача—обнаружить ошибки. Ясно, что в этом случае скорость чтения не может быть большой.
Во втором случае деятельность организуется иначе. Здесь главной задачей становится понимание и передача смысла текста. Как показали исследования Т. Г. Егорова [102], единицей восприятия у опытного чтеца является не буква и даже не слог, а целое слово. При этом схватывается лишь общая конфигурация букв, да и то не всех, а только доминирующих, т. е. тех, которые определяют слово как целостный зрительный образ. Большую роль в процессе чтения связного текста играют также смысловые догадки, направляющие этот процесс. Все это и увеличивает скорость чтения.
Что же касается чтения про себя, то задача здесь несколько упрощается (снимается необходимость передать содержание другому человеку). Вместе с тем перестраиваются и самые механизмы чтения. Это выражается, с одной стороны, в сокращении числа глазных движений
191
и длительности пауз между ними, с другой — в редукции движений артикуляторного аппарата. Естественно, что в этих условиях скорость чтения еще увеличивается.
о
w
20
W
чо
50 во Информация,
бит/мин
Рис.
35. Зависимость количества связей,
устанавливаемых авиадиспетчером,
от поступающей к нему информации
(по М. А. Дмитриевой) :
/
—» общее количество связей; 2
— количество
активных связей. лияние
способа деятельности на опознание
звуковых
последовательностей
было показано также в работе
Л. А.
Чистович, Ю. А. Клаасс и Р. О. Алекина
[325].
В этом исследовании
испытуемые должны были при опо
знании
тонов действовать двумя способами. В
одном слу
чае
предлагалось, слу-
,/
шая тоны, имптироватьнх
гласными,
в другом слу
чае
имитации не было.
Оказалось,
что в первом
случае
процент принятой
информации
заметно бо
лее
высок, чем во втором.
Когда
мы обращаемся
к
анализу сложных видов
деятельности
человека,
зависимость
пропускной
способности
от их задач
и способов
обнаруживает
ся
еще более явственно.
Так,
в исследовании М. А.
Дмитриевой,
проведенном
в пашей
лаборатории, бы
ла
предпринята -попытка
оценить
количество ин
формации,
перерабаты
ваемой диспетчером
КДП
(командно-диспет
черского
пункта) при уп
равлении
движением са
молетов.
Она обратила
внимание
на зависимость .количества активных
связей 1
от
скорости входной информации. Оказалось,
что с ро
стом
скорости растет и число связей, по
лишь до некото
рого
предела, за которым начинается спад
активности
диспетчера
(рис. 35). Этот предел обнаруживается
в
районе 45 бит/мин"(т.
е. около 0,80 бит/сек).
По-види
мому,
уже при такой скорости диспетчер едва
успевает
лияние
способа деятельности на опознание
звуковых
последовательностей
было показано также в работе
Л. А.
Чистович, Ю. А. Клаасс и Р. О. Алекина
[325].
В этом исследовании
испытуемые должны были при опо
знании
тонов действовать двумя способами. В
одном слу
чае
предлагалось, слу-
,/
шая тоны, имптироватьнх
гласными,
в другом слу
чае
имитации не было.
Оказалось,
что в первом
случае
процент принятой
информации
заметно бо
лее
высок, чем во втором.
Когда
мы обращаемся
к
анализу сложных видов
деятельности
человека,
зависимость
пропускной
способности
от их задач
и способов
обнаруживает
ся
еще более явственно.
Так,
в исследовании М. А.
Дмитриевой,
проведенном
в пашей
лаборатории, бы
ла
предпринята -попытка
оценить
количество ин
формации,
перерабаты
ваемой диспетчером
КДП
(командно-диспет
черского
пункта) при уп
равлении
движением са
молетов.
Она обратила
внимание
на зависимость .количества активных
связей 1
от
скорости входной информации. Оказалось,
что с ро
стом
скорости растет и число связей, по
лишь до некото
рого
предела, за которым начинается спад
активности
диспетчера
(рис. 35). Этот предел обнаруживается
в
районе 45 бит/мин"(т.
е. около 0,80 бит/сек).
По-види
мому,
уже при такой скорости диспетчер едва
успевает
1 Т. е. связей, устанавливаемых самим диспетчером. 192
перерабатывать всю поступающую информацию, что и приврдит к снижению его активности К
Если сравнить указанную величину «пропускной способности с приведенными выше, то бросается в глаза их довольно значительное расхождение. Дело в том, что, решая задачу управления воздушным движением, диспетчер выполняет с каждым из получаемых сообщений около десятка элементарных действий. Естественно, что для этого требуется гораздо больше времени, чем, например, просто для опознания сигнала или выполнения дизъюнктивной реакции.
Можно .предполагать, что скорость передачи информации зависит от состава деятельности человека, а значит, от числа и характера преобразований информации. Однако этот вопрос еще не изучен, по крайней мере, настолько, чтобы можно было в каждом конкретном случае точно определить состав и соотношения тех элементарных процессов, посредством которых осуществляются прием и передача информации. Пока мы располагаем данными лишь об узком круге элементарных процессов. Можно предполагать, что с изменением способа деятельности изменяется и структура образа, в котором отражается стимул.
Обычно при оценке пропускной способности определяют среднюю информацию, т. е. информацию, принимаемую и перерабатываемую в единицу времени. Ее величина может изменяться путем изменения как длины алфавита (числа возможных сигналов), так и вероятностей появления отдельных сигналов. В итоговой величине средней информации эти два пути оказываются скрытыми. Между тем с точки зрения психологического анализа процессов приема и переработки информации человеком они являются существенно различными, что было показано А. Н. Леонтьевым и Е. П. Кринчик [183]. В их экспериментах сопоставлялись зависимости времени реакции от индивидуальной и от средней информации. Первая величина определялась по формуле (236), вторая — по формуле (24). Полученные результаты представлены на рис. 36.
1 Впрочем, если иметь в виду, что диспетчер даже и при более высокой скорости входной информации все же продолжает руководить воздушным движением, надо признать, что в снижении активности по существу шроявляется изменение способа деятельности.
13—228G
193
с т и вторы
пришли к выводу, что психологическими
коррелятами указанных величин
являются параметры, которые можно
обозначить как степень
неожиданно-(завиепт
от вероятности появления данного
сигнала, т. е. от индивидуальной
информации) и степень
сложности
выбора
(зависит от длины алфавита и распределения
вероятностей появления его элементов,
т. е. от средней информации).
вторы
пришли к выводу, что психологическими
коррелятами указанных величин
являются параметры, которые можно
обозначить как степень
неожиданно-(завиепт
от вероятности появления данного
сигнала, т. е. от индивидуальной
информации) и степень
сложности
выбора
(зависит от длины алфавита и распределения
вероятностей появления его элементов,
т. е. от средней информации).
\1 2 3 0,2
Величина информации, бит Рис. 36. Зависимость времени реакции от
индивидуальной и
средней информации
(по А. Н. Леонтьеву
и Е. П. Крипчик):
зависимость вре мени реакции от вели чины индивидуальной информации (в диапа зоне от 0,09 до 4 опт); зависимость вре мени реакции от сред ней информации (экс траполированная прямая по данным в точках для 0,0!); 0,20 и 0,42 бит).
Эксперименты Леонтьева и Крпнчик показали, что переработка информации человеком <не есть пассивное отражение статистической структуры сигналов, а представляет собой активную деятельность, приводящую к возможно более эффективному решению задачи. В ходе опытов испытуемый па основе учета вероятностей появления сигналов оптимизирует процесс приема информации так, что, несколько проигрывая в скорости восприятия частых сигналов, он существенно выигрывает в скорости восприятия сигналов редких. В этом выражается действие активного ожидания, формирующегося в процессе опыта.
Влияние активного ожидания на скорость восприятия информации выявлено также в опытах О. А. Ко-нопкипа [155]. Он предлагал испытуемым последовательности сигналов разной длины (4 h 8) и измерял время дизъюнктивных реакций для каждой из них. Затем испытуемому
давалась инструкция, которая формировала у него установку (активное ожидание), несоответствующую действительному ходу эксперимента. Например, испытуемому в серии опытов, в которых предъявлялись сигналы из последовательности 4 (2 бит/сигн при равной вероятности их появления), сообщалось, что ему будут даваться сигналы из последовательности 8
194
(3 бит/сигн). Оказалось, что время реакции в этих условиях более соответствует ожидаемому, чем действительному информационному содержанию сигнала, т. е. определяется сформированной установкой.
В экспериментах М. А. Дмитриевой изучалась зависимость скорости восприятия и переработки информации от характера функциональных связей между признаками сигналов. Использовались сигналы, имеющие два признака. В (первой серии испытуемый должен был реагировать одним образом (нажим белой кнопки), если оба признака соответствовали заданному образцу, и другим (нажим черной .кнопки), если хотя бы один из них не соответствовал образцу (связь «и»). Во второй серии испытуемый должен был реагировать одним образом, если хотя бы один признак сигнала соответствовал образцу, и другим, если ни одни не соответствовал (связь «или»). В третьей серии он реагировал одним образом, если один и только один признак соответствовал образцу, и другим, если оба либо соответствовали, либо не соответствовали образцу (связь «либо»).
Во всех трех сериях испытуемым передавалось одно и то же количество информации, оцениваемое по вероятности предъявления сигналов, требующих либо одного, либо другого ответа. Однако время реакций и процент точных ответов во всех трех сериях оказались существенно различными. Наиболее высокая скорость переработки информации была в первой серии экспериментов, несколько меньшая — во второй и значительно меньшая - - в третьей.
'Полученные данные свидетельствуют о зависимости скорости переработки информации человеком от характера решаемой им задачи, а следовательно, и от типа операции выбора.
В других опытах М. А. Дмитриевой измерялась скорость переработки информации при выполнении отдельных элементарных операций (сравнение пар цифровых знаков по положению, по форме, а также вычитание и деление). Затем испытуемым предла'галось выполнять с подобными же парами цифр п е с к о л ьк о элементарных операций подряд. Оказалось, что во втором случае скорость переработки информации заметно больше, чем средняя от скоростей составляющих элементарных операций. Это позволяет предполагать, что с объединением
ряда элементарных операций в определенную 'последовательность формируются некоторые новые (по сравнению с отдельными операциями) способы переработки информации. Результаты рассмотренных исследований приводят к выводу о том, что нельзя оценивать скорость приема и переработки информации человеком безотносительно к структуре его деятельности.
Оценивая «пропускную способность» человека, целесообразно различать операции 'приема, передачи и накопления информации, поскольку они могут быть разделены во времени.
Одной из элементарных операций приема является опознание сигналов, поступающих на «сенсорный вход». Его изучению было посвящено исследование Шиклаи [485]. В экспериментах .использовалась телевизионная аппаратура, позволяющая дозировать время экспозиции. На экране показывалось некоторое «дежурное» изображение. Затем на короткое время (Узо, Vis, 2/is, У<ь Уг, 1 или 2 сек) оно заменялось тест-изображением, которое испытуемые должны были опознать. После этого на экране вновь появлялось «дежурное» изображение К Приняв, что, опознавая один предмет, испытуемый осуществляет выбор из «алфавита» в 1000 предметов (это число взято по словарю), Шиклаи подсчитал количество передаваемой информации по формуле
C=JiMiЈ, (28)
где С — пропускная способность; Т — время экспозиции;
п — число предметов, правильно опознанных испытуемым; N—число предметов в «алфавите», Имеется в виду, что вероятности предъявления любого 'предмета равны.
По Г. С. Шиклаи, при опознании одного предмета человек получает информацию, равную примерно 10 бит (log"21000), Так как испытуемые опознавали за У4 сек из всех предъявленных предметов только один, за У2—
1 «Дежурное» изображение использовалось для того, чтобы не .позволять «накапливать на сетчатке испытательное изображение».
m
два и т. д., то он нашел, что С — 40 бит/сек. В более поздних опытах испытуемого заранее знакомили с ограниченным набором предметов (от 2 до 16), а затем он должен был О'поз.навать их при коротких экспозициях. В этом случае1 С — 30 бит/сек.
Сходное исследование провели Глезер, Цуккерма.н и Цыкунова [77]. По >их данным, пропускная способность зрительной системы, выявляемая при опознании предметов, равна 50—70 бит/сек.
В проведенных исследованиях вызывает сомнение выбор алфавита, относительно которого производились расчеты. В самом деле, какие имеются основания полагать, что число известных человеку предметов имеет порядок тысячи? В. Д. Глезер и И. И. Цуккермап отмечают, что даже если удвоить длину алфавита, то информация на предмет увеличится 'незначительно. Но и эта оговорка не снимает сомнения.
Для проверки приведенных данных, а также решения некоторых других вопросов нами была предпринята попытка определить пропускную способность зрительной системы .по пороговым характеристикам процесса опознания буквенных и цифровых знаков.
Выбор именно этих символов диктовался рядом соображений. Во-первых, число знаков в алфавите точно известно, что облегчает задачу подсчета информации, принимаемой человеком при опознании. Во-вторых, есть все основания полагать, что данные алфавиты усвоены наышми испытуемыми (студентами) достаточно прочно. В-третьих, информация на символ ,в «буквенном» и «цифровом» алфавитах различна. Поэтому сравнение данных, полученных при опознании тех и других, позволяет проверить, является ли пропускная способность действительно некоторой константной величиной. Испытуемым тахистоеко'пически в случайном порядке предъявлялись цифры (первая серия) и буквы (вторая серия), которые они должны были называть. Частота предъявления каждого знака каждому испытуемому была одинакова. Внешняя освещенность тест-объектов и их угловые размеры также были одинаковы во всех опытах. Время
1 Шиклаи считает, что эти величины характеризуют восприятие. Однако здесь может идти речь лишь об опознании, что следует из 'самой методики экспериментов.
197
экспозиции равнялось заранее определенному пороговому времени опознания для каждого испытуемого. Ниже приводится таблица распределения частот ответов, даваемых испытуемыми при опознании цифр. В колонках представлены альтернативные знаки, а в рядах—альтернативные ответы (табл. 5).
ТАБЛИЦА 5
Частоты ответов при опознании вдфр (данные первой * серии)

9 |
£ |
2 |
34 , |
1 |
31 |
5 |
54 |
|
13 |
|
44 |
2 |
43 1 |
1 |
51 ' |
7 |
68 |
1 |
30 |
20 |
29 |
5 |
97 |
1 50 |
500 |
|
0 ~25~ |
1 |
2 |
3 3 |
4 |
5 |
G 2 |
7 3 2 |
8 |
0 |
2 |
||||||||
1 |
2 |
9 4 |
1 28 |
4 4 |
2 |
3 3 |
5 |
1 |
|
2 |
1 |
2 |
|||||||
3 |
I |
|
|
12 |
|
|
|
|
|
4 |
2 |
2 |
3 |
1 |
33 |
|
1 |
1 |
1 |
5 |
1 1 |
1 з |
2 |
2 1 |
2 2 |
34 |
1 30 |
|
|
6 |
4 |
||||||||
7 |
1 |
1 |
9 |
3 |
1 |
1 |
1 |
42 |
2 |
8 |
|
|
|
|
|
3 |
|
|
31 |
9 |
1 |
2 |
|
|
|
|
|
|
1 |
"„(«) |
15 |
28 |
7 |
20 |
5 |
5 |
4 |
2 |
(5 |
\] |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
/~/(х)
В экспериментах по опознанию цифр каждая из них предъявлялась 50 раз (по десять -предъявлений пятерым испытуемым). Поскольку время предъявления было пороговым, испытуемые не всегда давали правильные ответы. В ряде случаев цифры или не опознавались вообще (ненадежность приема) или опознавались неверно (неоднозначность приема).
Просматривая колонки табл. 5, мы видим, сколько раз при предъявлении каждой данной цифры испытуемый давал правильные и неверные ответы. Так, из пятидесяти предъявлений цифры 0 лишь в двадцати пяти случаях происходило точное опознание, в двух случаях
198
О был принят за 1, в одном — за 2, в одном — за 3, в двух —за 4, в одном —за 5, в одном-—за 6, в одном— за 7 и в одном — за 8. В пятнадцати случаях испытуемые не дал'и никакого ответа.
Просматривая ряды таблицы, мы видим, сколько раз встречается тот или иной ответ при .предъявлении всех цифр. Так, в экспериментах было получено 34 ответа «ноль». При этом в двадцати пяти случаях ответ «ноль» был получен при предъявлении цифры 0, в трех случаях— при предъявлении цифры 3, в двух — цифры 6, в двух—8, в двух—9. В предпоследнем ряду Ну(<х) указано число случаев, когда ответ отсутствовал.
Обработка данных проводилась по методу мультива-риативиого информационного анализа, разработанному Гарнером, Хейком и Мак-Гиллом [по 340]. Этот метод является информационным аналогом вариационного исчисления.
По формуле (25) было определено количество информации, принятой испытуемым при опознании знаков. Пропускная способность определялась по количеству принятой информации за пороговое время экспозиции, т. е. использовалась формула
C = -^lf (29)
* мин
где Т(Х,У) — количество принятой информации; '/М1ш—пороговое время экспозиции знака.
Анализ данных показал, что при пороговом времени экспозиции возникают значительные потери входной информации. Так, 'при опознании цифр испытуемые приняли только 1,47 бит из 3,32, т. е. ненадежность и неоднозначность приема составили 1,85 бит, При опознании букв было принято только 2,28 бит из 5. Ненадежность и неоднозначность приема составляли 2,72 бит.
По показателям опознания цифр пропускная способность равна примерно 58 бит/сек. По -показателям опознания букв она в 'полтора раза больше и составляет примерно 91 бит/сек.
На основе полученных величин было определено то минимальное время, за которое человек мог бы опознать любой из символов данного алфавита, т. е. принять информацию без потерь и искажений. По расчетам как для «цифрового», так и для «буквенного» алфавита это вре-
199
мя должно быть примерно 0,06 сек. Однако контрольные эксперименты внесли некоторые коррективы. Оказалось, что при данной экспозиции действительно опознаются 'почти все цифры (потери информации мен^е 0,1 бит).
Но потери информации при опознании букв значительно больше (до 0,6 бит). Почти точное опознание всех букв (с потерей не более 0,1 бит) начинается только при экспозиции 0,09 сек1.
Величины минимального времени опознания всех знаков относятся друг к другу примерно так же, как указанные выше величины пропускной способности: 0,06:0,09 — 58:91. Это 'позволяет заключить, что все же пропускная способность при опознании как букв, та,к и цифр является величиной более или менее постоянной и равна пр'имер-iHo 55 бит/сек
/ ~ 3,32 бит 5,00 бит гп г / \
( С ^ —тгт^ — —ггт^ = 55 бит сек .
I 0,0b сек 0,09 сек ' J
Анализ ошибок, допускаемых при опознании знаков, обнаруживает их тенденциозность. Как правило, испытуемый наиболее часто неверно идентифицирует знаки, сходные 'по начертанию (например, 3 и 5, ВиБ, ЗиЭ и т. п.). Быстрее всего опознаются знаки, имеющие ярко выраженные опознавательные признаки. На скорость опознания влияет также степень геометрической сложности знака: чем более сложен знак по начертанию, тем
1 В контрольных экспериментах время экспозиции постепенно увеличивалось от порогового времени до тех пор, пока не начиналось точное опознание знаков. При этом наблюдалось постепенное сокращение альтернатив. При короткой экспозиции испытуемые часто отвечали дизъюнктивными суждениями 'с несколькими 'предикатами (например: «Это или 3..., или Б..., или В»)'. Затем количество предикатов сокращалось (например: «Это или Б..., или В»), и, наконец, появлялся точный ответ. Аналогичная картина 'наблюдалась также в наших более ,ранних исследованиях по проблеме осязательного опознания геометрических фигур. Постепенное сужение классов, из которых производится выбор, при увеличении времени экспозиции тест-объекта отмечено и в работе Глезера и Цуккерманя [77]. Эти факты подтверждают предположение о том, что процесс опознания осуществляется но принципу 'прогрессивной классификации. Однако надо отметить, что нет строгого соответствия последовательности выборов движению по «кодовому дереву». Осуществляя последовательные выборы, человек обычно сразу как бы перескакивает через несколько ступенек.
200
больше времени требуется для его опознания. В этом проявляется влияние отмеченного выше фактора различимости.
Полученная величина справедлива только по отношению к случаям одноактного опознания символов. По существу, в экспериментах как Шиклаи, Глезера, Цуккер-мана, так и в наших работах выявлено только мгновенное значение пропускной способности. Нет никаких оснований считать, что человек будет в течение длительного времени точно опознавать сигналы, подаваемые с большой частотой, даже если скорость входной информации и не 'превысит мгновенного значения пропускной способности. Например, вряд ли можно ожидать, что человек в течение часа сумеет точно опознать двести тысяч сигналов, каждый из которых несет информацию, равную 1 бит. Сомнительно также, чтобы человек за 1 сек мог сделать 60 альтернативных выборов, т. е. опознать один символ из алфавита, включающего 2(У) (^1018) символов.
Величины, 'полученные при измерении мгновенного значения пропускной способности, еще недостаточны для определения допустимой скорости передачи информации человеку-оператору, включенному в систему управления.
Чтобы результаты теоретико-информационного изучения деятельности человека могли быть использованы для расчетов систем «человек—машина», необходимо решить целый ряд вопросов.
Прежде всего важно установить, какова максимально допустимая и оптимальная длина алфавита, с которым может работать человек. К сожалению, мы пока еще очень -мало знаем о том, как формируется и что представляет собой «рабочий алфавит» оператора.
Не менее важным является также вопрос об изменении пропускной способности анализаторов человека в ходе деятельности. Исходя изданных о динамике работоспособности (гл.1), естественно предположить, что максимальная скорость приема, переработки и передачи информации в течение рабочего дня изменяется.
Деятельность человека никогда не исчерпывается просто опознанием. Оно является лишь первым момейтом, за которым следует более или менее сложная система других актов, заканчивающихся речевым или двигательным ответом.
201
Сыпали объектам несуществующие признаки. Третья группа не обеспечивала необходимой полноты декоди^ рования [312]. Данные экспериментов Тутушкиной приведены в табл. 13.
ТАБЛИЦА 13
Зависимость точности и времени декодирования
знаков от количественного соотношения
признаков знака и объекта
(по М- К. Тутушкиной)
Количественное соотношение признаков
Ошибки декодирования, %
Время декодирования, мсек
Недостаток Равенство . Избыток .
23 3 9
2,50 2,23 2,24
Очевидно, оптимальной является такая система кодирования, при которой отношение числа опознаваемых признаков знака ik числу признаков объекта равно единице. При этом важно подчеркнуть необходимость строгой субординации признаков, в соответствии с которой должна находиться степень их различимости.
■В ряде исследований (М. К- Тутушкина ![308—312], П. Б. Невельский [240], В. Я. Ляудис [226] и др.) подчеркивается влияние классификации знаков на скорость их заучивания и точность воспроизведения. Так, в экспериментах Тутушкиной двум группам испытуемых предлагалось заучить алфавит знаков. При этом одна группа (классифицировала знаки в соответствии с отношением их признаков к признакам объекта (например, контур обозначал род объекта, детали — вид, буквы — подвид и т. д); другая группа должна была запомнить знаки, не производя классификации. Изменения эффективности декодирования (по показателям 'допускаемых ошибок и времени сенсоречевой реакции) в процессе заучивания представлены на рис. 60 |[310].
В этих экспериментах показано также различие сохранения в памяти разных элементов через некоторое время после заучивания (табл. 14).
Интересно, что в этих опытах, так же как и в описанных выше, выявилось 'преимущество контура; наружные детали воспроизводились менее точно, чем внутренние. Наилучшими по точности воспроизведения элементами
302
знака оказались буквы, что объясняется прочностью •усвоенного алфавита (грамотным испытуемым не было необходимости запоминать самый буквенный знак).
По числу ошибок воспроизведения и опознания заученных знаков подтвердились данные о преимуществе
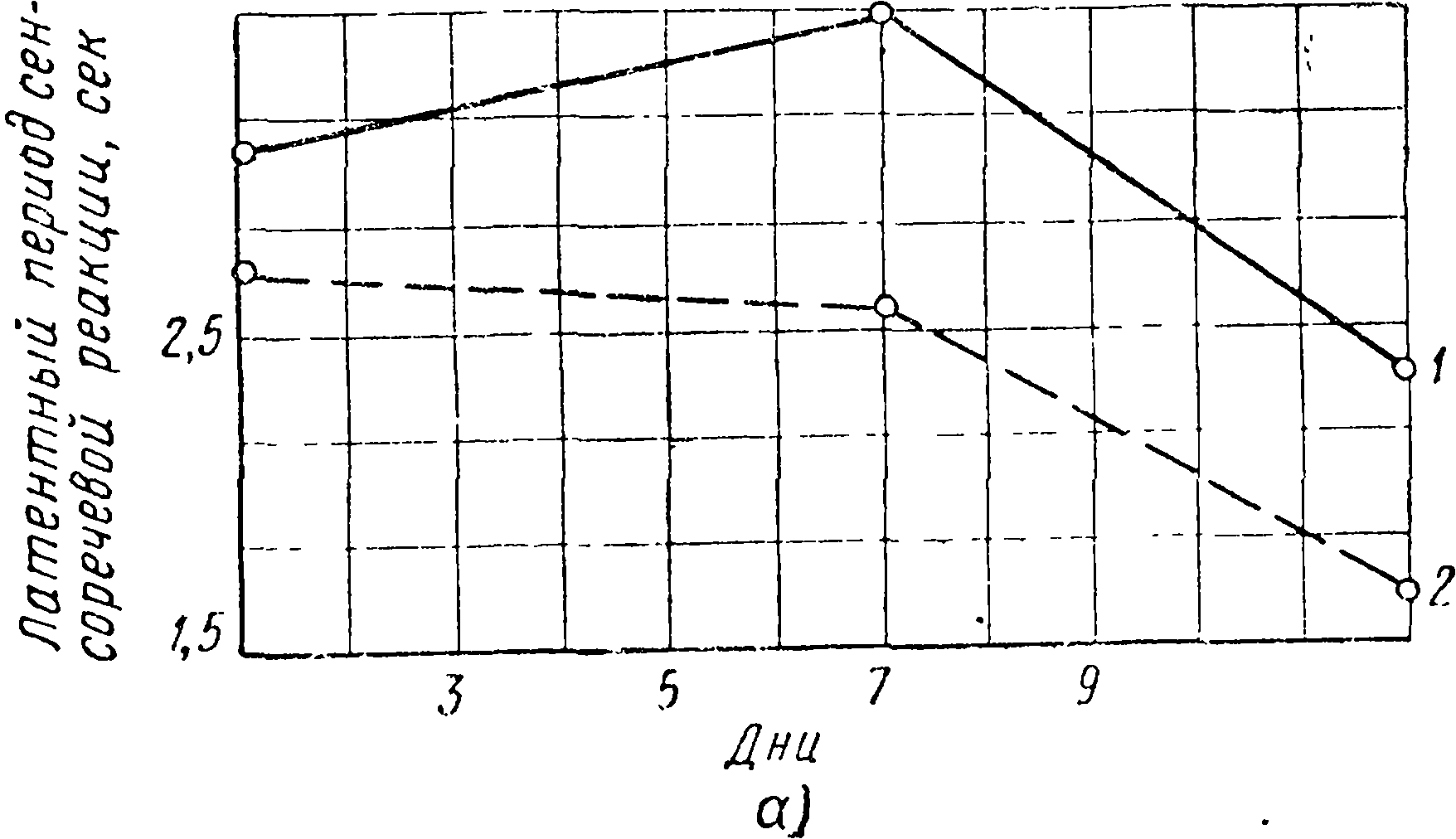
|
*v^^ |
|
|
|
|
|
|
|
|
|
|
|
го |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
>/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• s |
У |
|
=_= |
|
—1 |
>2 |
Дна 5)
Рис. 60. Зависимость точности и времени опознания знаков от тренировки (по М. К. Тутушкиной):
/ — данные испытуемых, которые не классифицировали знаки; 2 — данные испытуемых, которые классифицировали
тех знаков, число признаков которых равно числу признаков кодируемых объектов (табл. 15).
Из приведенных данных следует, что при классификации объектов и соответствующих им знаков наиболее важные признаки (родовые) целесообразно кодировать с помощью контура знака, остальные — по степени важности—с помощью букв, внутренних и, наконец, наружных деталей.
30|
ТАБЛИ Ц А 14
Эффективность воспроизведения элементов знаков1 (по М. К. Тутушкиной)
Элементы знаков
Отношение ошибок воспроизведения
к общему количеству элементов
(в %)
полное забывание
добавление
перепое
Контур
Внутренние детали , Наружные детали Буквы ,
26 50 50 15
1 Испытуемым спустя педелю нос ic заучивания предлагалось нарисовать
ТАБЛИЦА 15