

Электропривод серии эшир-1
Эти реверсивные электроприводы построены на принципе широтно-импульсной модуляции (ШИМ), который обеспечивает самое высокое быстродействие. Полоса пропускания этих приводов в 3-5 раз больше, чем у приводов других серий, КПД и коэффициент использования двигателя имеют наилучшие показатели.
Структурная схема электропривода показана на рис. 2.23. Сигнал рассогласования, образованный разностью напряжений задания и тахогенератора, усиливается в регуляторе частоты вращения (РВЧ) и поступает на вход регулятора тока (РТ). С его выхода сигнал поступает на входы ШИМ1 и ШИМ2, осуществляющие модуляцию входного сигнала в зависимости от его знака. С выхода ШИМов биполярный сигнал поступает на вход узлов задержки УЗ1…УЗ4, а после них – на узлы гальванической развязки УГР1…УГР4 и, наконец, на импульсные усилители ИУ1…ИУ4. Каждый из четырех каналов УЗ, УГР и ИУ управляет плечами модуляции
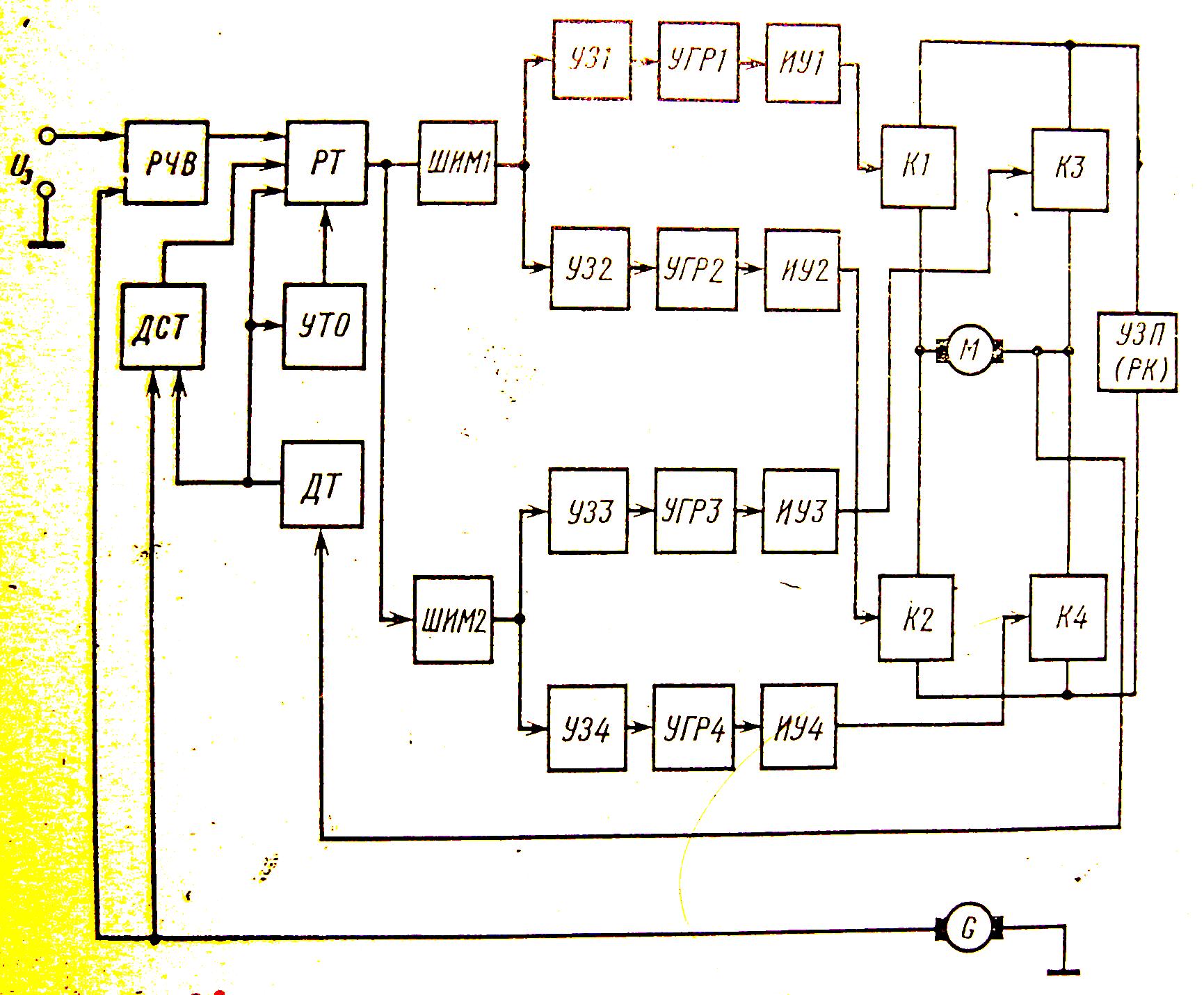
Рис. 2.23. Структурная схема электропривода серии ЭШИР-1
Силовых транзисторных ключей К1…К4, в диагональ которого включен якорь двигателя постоянного тока М. При вращении то в одну сторону работают ключи К1, К4, в противоположном – К2, К3.
Датчик тока (ДТ) формирует сигнал, пропорциональный току. Сигнал с выхода ДТ поступает на РТ и устройство токоограничения (УТО). На вход РТ поступает также сигнал от датчика статического тока (ДСТ), улучшающего быстродействия привода при работе в оьласти малых скоростей. Устройство защиты от перенапряжений (УЗП) служит для защиты транзисторных ключей от недопустимых напряжений при переходных процессах. Кроме этой защиты предусмотрены защиты ключей от перегрузок на мощности , от неуправляемого разгона на максимальную скорость и др.
Электроприводы главного движения эт3, этзд, этрп
Развитие производства и применение комплектных электроприводов подач станков привели к широкому использованию привода главного движения, регулируемого как по закону постоянства мощности, так и по закону постоянства момента. Регулируемый электропривод главного движения сначала применяли в станках с приводом небольшой мощности. Например, привод главного движения серийных координатно-расточных станков был укомплектован движения электромашинным приводом по системе Г-Д мощностью 2 кВт. Затем этот привод был заменен электроприводом со статическим преобразователем на магнитных усилителях типа ПИУ6М-13. Его технические данные: регулирование частоты вращения в обмотке возбуждения с диапазоном 1:4 (2800-7000 об/мин) и напряжения на якоре
1:10. Изменение тока возбуждения осуществлялось регулируемым серводвигателем, меняющим сопротивлением в цепи возбуждения.
Затем был разработан и внедрен электропривод главного движения серии ПКВ на кремниевых диодах мощностью до 14 кВт. Частота вращения регулировалась только полем (1:4), были предусмотрены ступенчатый пуск и регулирование тока возбуждения при помощи резистора. Недостаточная надежность и отсутствие зоны регулирования в цепи якоря привели к разработке тиристорного привода главного движения станков серии ПКВТ (регулирование напряжения на якоре с D=1-4). Диапазон мощности 1,4-24 кВт. Особенность привода – наличие одного задатчика частоты вращения на обе зоны регулирования. Переход из одной зоны в другую осуществляется автоматически за счет использования им номинального значения. Недостаточный диапазон регулирования напряжения в цепи якоря привел к созданию электропривода серии ЭТ3, у которого диапазон к созданию регулирования напряжения в цепи якоря привел к созданию электропривода серии ЭТ3, у которого диапазон регулирования напряжением якоря достигает D=1:100, а полем D=1:5.
В связи с расширением области применения регулируемых приводов главного движения появились новые требования (реверсивность
Технические данные электроприводов главного движения

и отсутствие силового трансформатора), которым отвечают разработанные новые серии электроприводов: ЭТ3Д – реверсивный с диапазоном регулирования частоты по якорю D=1:100, но с силовым трансформатором и ЭТ3ДР – реверсивный, бестрансформаторный, с D=1:100. В таблице выше приведены основные технические характеристики электроприводов главного движения.
Электроприводы серий ЭТ3 и ЭТ3Д комплектные, нереверсивные и предназначены для плавного изменения частоты вращения механизмов главного движения станков и машин. Привод комплектуется двумя полупроводниковыми преобразователями на тиристорах и силовых диодах,
обеспечивающих преобразование переменного напряжения сети в регулируемое по напряжению постоянного тока для питания цепей якоря и возбуждения электродвигателя постоянного тока. Кроме того, в комплект привода входят блок динамического торможения, электродвигатель и задатчик частоты вращения.
Приводы могут работать в двигательном режиме и режиме динамического торможения. Приводы серии ЭТ3 работают в режиме постоянства предельного момента, серии ЭТ3Д – в режимах постоянства предельного момента и постоянства предельной мощности. Диапазон мощностей 1,4-14кВт. Диапазон регулирования 450-3000об/мин при предельной мощности и 15-2000 об/мин в режиме предельного момента. Суммарная погрешность привода +- (10-20)% на низкой частоте вращения.
Предусмотрена защита от перегрузки, коротких замыканий и исчезновения напряжения. В качестве усилителя используется интегральная микросхема. Структурная схема привода приведена на рис. 2.24. Электропривод работает следующим образом. Разность задающего сигнала Uз и сигнала обратной связи, получаемого от

Тахогенератора ТГ, подается на усилитель У1, охваченный цепью коррекции КУ1. Выходной сигнал У1 подается на тиристорный преобразователь ТП1, питающий якорь двигателя М. При достижении номинальной частоты вращения двигателя дальнейший разгон его происходит за счет ослабления поля, т.е. за счет уменьшения тока в обмотке возбуждения ОВ. Последняя питается от тиристорного выпрямителя ТП2, управляемого усилителем У2, который охвачен корректирующей цепью КУ2. На входе усилителя У2 сигнал на ослабление поля возникает при условии превышения опорного напряжения Uя, снимаемого с якоря двигателя. Это происходит при превышении двигателем номинальной частоты вращения.
Частота вращения привода задается положением движка задатчика, причем регулирование осуществляется в следующей последовательности: при частотах вращения меньше номинальной – изменением напряжения на якоре, при частотах вращения больше номинальной – уменьшением тока в обмотке возбуждения (серия ЭТ3Д). При необходимости задатчик отключают и частоту вращения можно регулировать с помощью другого источника напряжения. Частота вращения двигателя линейно зависит лт задающего напряжения. Размеры преобразовательного блока 484x350x265мм, масса 25 кг; размеры блока торможения 175x120x230мм, масса 15 кг.