

Электропривод эт6
Электропривод постоянного тока серии ЭТ6 предназначен для регулирования частоты вращения электродвигателя постоянного тока в большом диапазоне частот вращения и применяется в качестве привода механизмов подач. Он состоит из тиристорного преобразователя, электродвигателя со встроенным тахогенератором, силового трансформатора серии ТС, задатчика частоты вращения и токоограничивающих дросселей. Электропривод представляет собой комплектное устройство, выполненное в открытом исполнении и предназначенное для встройки в шкаф. Управляющее устройство и силовой блок преобразователя имеют блочную конструкцию, обеспечивающую оперативную замену блоков и возможность ремонта или замены отдельных элементов.
Основные технические данные электропривода ЭТ6:

Диапазон регулирования определяется максимальной скоростью двигателя, так как минимальная частота вращения двигателя 0,1об/мин. Электропривод обеспечивает работу во всех четырех квадрантах механической характеристики при изменении управляющего напряжения в пределах 10В.
На рис. 2.20, а представлена структурная схема электропривода. Отличительной чертой ее является двухконтурная система подчиненного регулирования с регулятором скорости (РС) и регулятором тока (РТ). Схемой предусмотрено зависимое от скорости токоограничение и такое же ограничение выходного сигнала регулятора тока, поступающего на вход тиристорного преобразователя (ТП). В качестве датчика обратной связи по частоте вращения (ДС) используется тахогенератор, по току (ДТ) – магнитодиоды, включенные в цепь якоря двигателя. Последний изображен в виде звеньев: инерционного (ИН) и интегрирующего (ИНТ). U3 – задающее напряжения, UДС – напряжения датчика скорости, UРС – выходное напряжение регулятора тока, UЯ – напряжение на якоре двигателя. Блоки токоограничения (ТО) и ограничения выходного напряжения (ОГР) вырабатывают сигналы, выдаваемые в систему управления.
На рис.41, б показана силовая схема электропривода. Напряжение на якоре двигателя М регулируется с помощью шестиимпульсного реверсивного тиристорного преобразователя на 12 тиристорах V01…V12. Тиристорный преобразователь получает питание от силового трехфазного трансформатора TV, первичная сторона которого включена в треугольник, силовая вторичная обмотка – в шестифазную звезду и третья – обмотка для питания цепей управления – в звезду. Для ограничения уравнительных токов между вентилями катодной и анодной групп включены токоограничивающие дроссели L1 и L2.
Тиристоры выпрямители управляются импульсами, поступающими от системы формирования управляющих импульсов, состоящей из шести идентичных каналов управления. На схеме (рис.41,в) полностью изображен лишь один канал управления тиристорами фазы А. Синусоидальное развертывающее напряжение со вторичной обмотки трансформатора TV14 (точка 6), сравнивается с напряжением выхода регулятора тока (точка 19) и подается на вход нуль-органа А101, выполненного на интегральном операционном усилителе с большим коэффициентом усиления. Моменты времени переключения нуль-органа А101 выделяются дифференцирующей цепочкой R105, C105, C106, усиливаются транзисторами VT101 и VT102 и через импульсный трансформатор VT103, через импульсный трансформатор TV01 поступают на управление тиристором катодной группы.
Необходимое качество работы электропривода в статике и динамике обеспечивается благодаря двухконтурной структуре электропривода с регулятором тока и частоты вращения. На входе регулятора частоты (рис.41,г), представляющего собой двухкаскадный усилитель постоянного тока, собранный на микросхемах А301 и А302, сравниваются сигнал от датчика скорости (вход 91) и сигнал отрицательной обратной связи по частоте с тахогенератора (вход 90). Разность этих сигналов
усиливается и поступающим с датчика отрицательной обратной связи по току, поступающим с датчика. Усилитель А302 служит для компенсации дрейфа нуля усилителя А301. Датчик тока выполнен на магнитодиодах (включенный в мостовую схему), которые находятся в магнитном поле, создаваемом проводниками, по которым протекает ток якоря, в зависимости от тока магнитодиоды меняют свою проводимость.
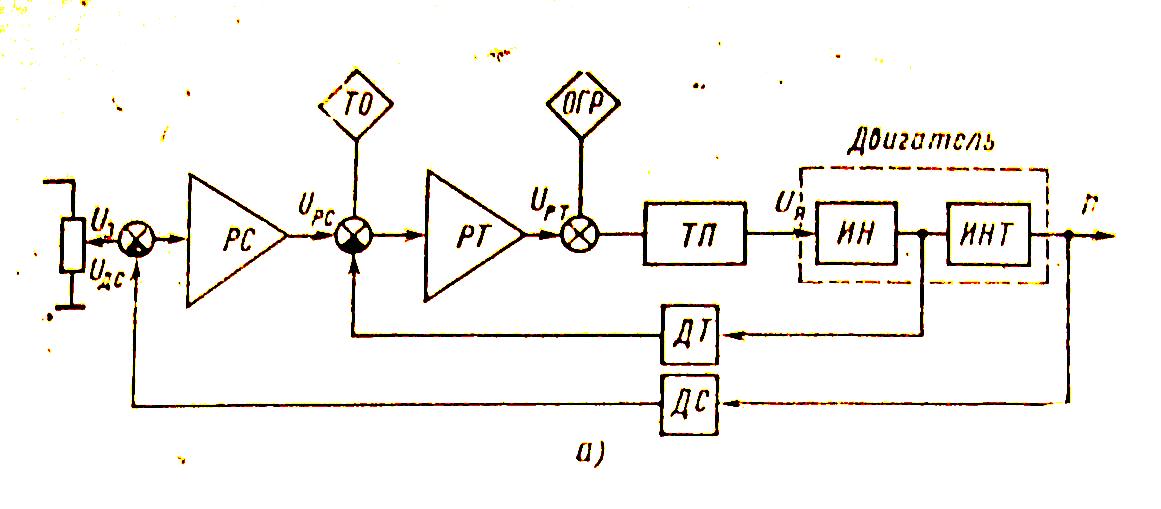
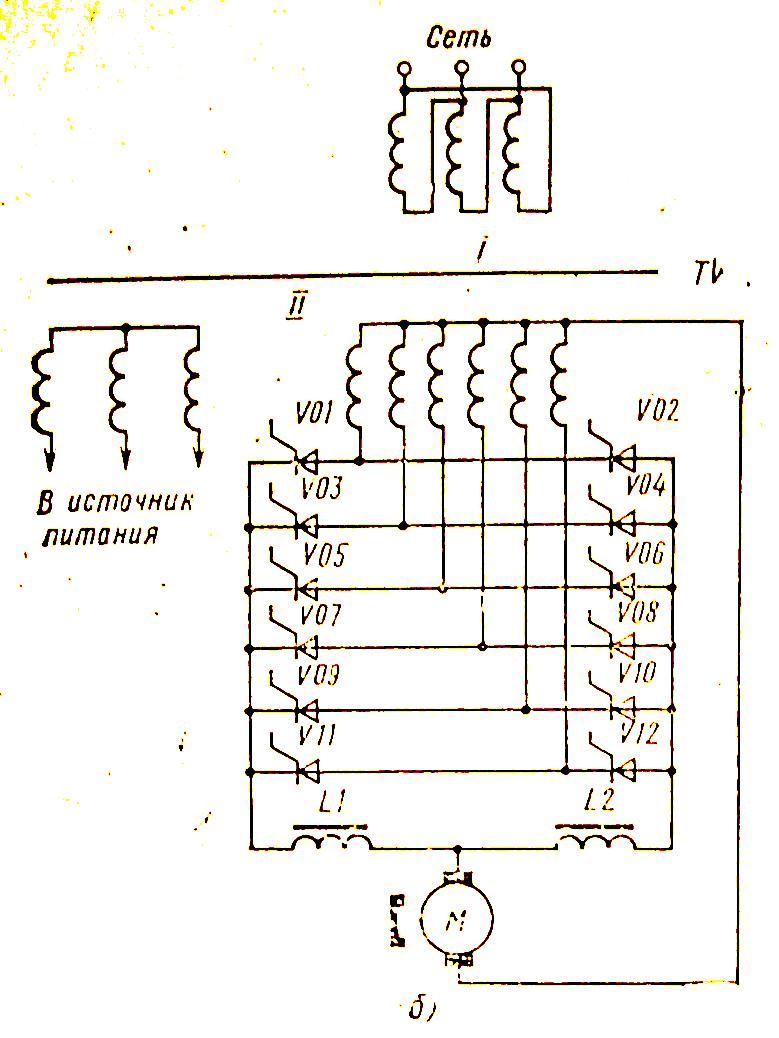
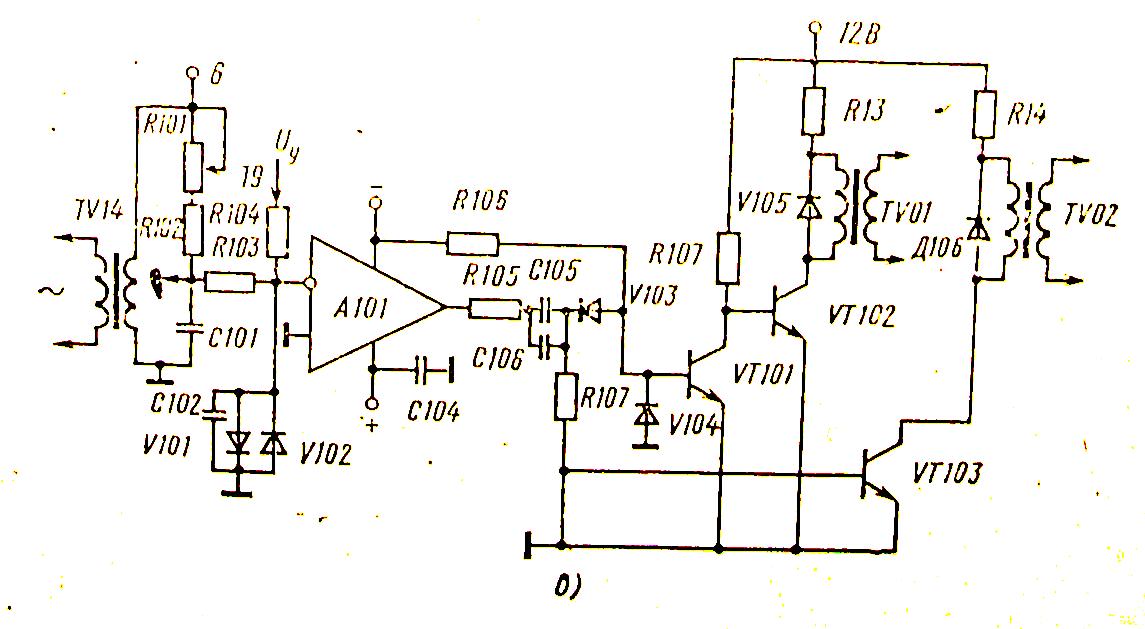
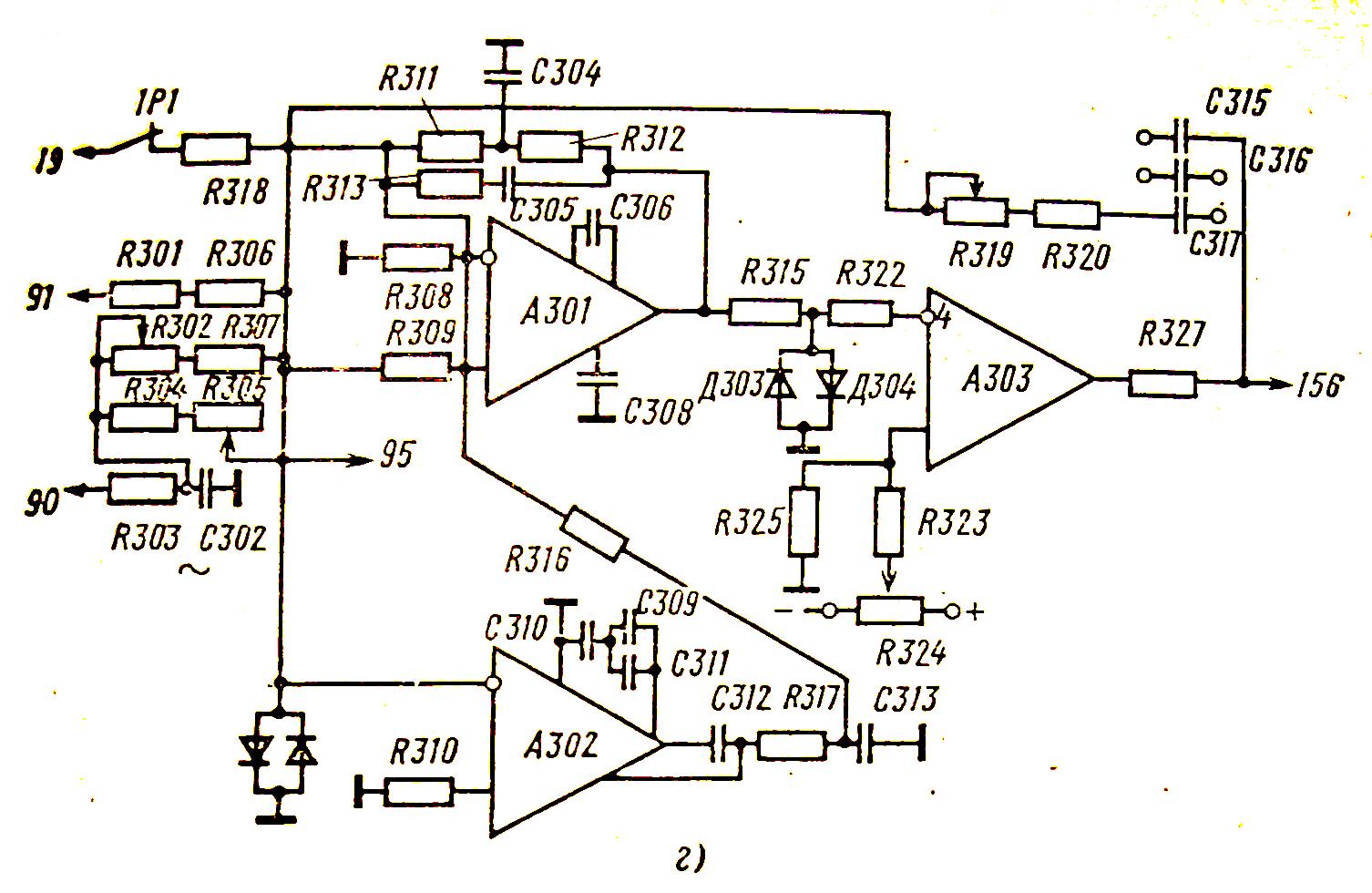
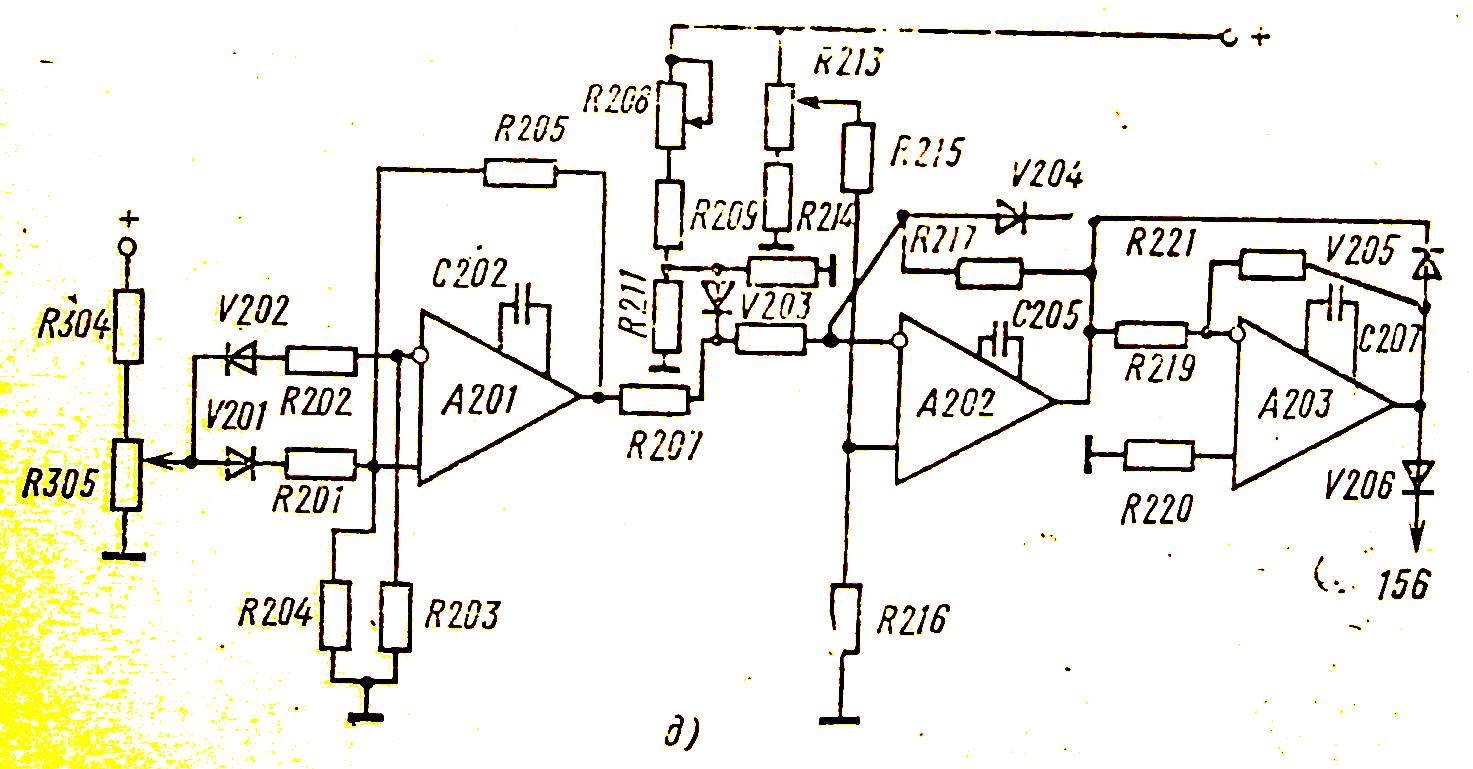
Рис. 2.20. Схемы привода серии ЭТ6:
а – структурная; б – силовая часть;
в – СИФУ; г – регулятор частоты вращения;
д – токоограничения.
Сигнал с выхода регулятора тока подается на вход системы формирования импульсов, управляющих тиристорами преобразователя.
Схема токоограничения (рис.2.21д) собрана на микросхемах А201, А202 и А203. Она обеспечивает зависимое от частоты вращения токоограничение, обусловленное применением высокомоментных двигателей серии ПБВ. Элементы коррекции подбираются при накладке. С целью исключения недопустимых токов в цепи якоря при переходных процессах предусмотрена схема, состоящая из операционного усилителя и стабилитрона.
Предусмотрен операционный усилитель, который может быть использован в качестве регулятора положения, для чего входные и выходные цепи усилителя осуществляется переменным резистором. Схема управления преобразователем позволяет осуществить защиту электропривода при неправильном чередовании фаз питающей сети, обрыве любой из фаз, при исчезновении стабилизированного напряжения любой полярности, при перегреве электродвигателей. Выходными элементами узла защиты, собранного на транзисторах, являются реле.