

Электропривод постоянного тока на базе широтно-импульсного преобразователя
Система электропривода с ШИП, синтезированная по «гладкой» составляющей ничем не отличается от аналогичной с УВ (рис.2.10.). При этом за нескомпенсированную постоянную следует принять период коммутации ШИП.
Модель электропривода с ШИП может быть реализована с использованием как функциональных, так и виртуальных блоков. В первом случае модель двигателя реализуется структурной схемой, составленной по уравнениям, описывающим двигатель.
Функциональная модель электропривода постоянного тока с ШИП на базе машины с независимым возбуждением представлена на рис. 2.17.а
В блоке PW-Control (рис. 2.17 б) смоделирован широтно-импульсный преобразователь. В схеме (рис.2.17 а), кроме того, показана несколько измененная по сравнению с рис. 2.3. модель машины постоянного тока с независимым возбуждением. Здесь она оставлена аналогичной обобщенной машине (рис.2.1.), но цепь возбуждения реализована как безынерционная (из рис.2.17 видно, что постоянная времени в цепи возбуждения равна нулю).

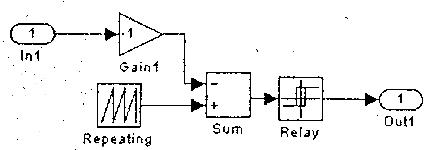
Рис. 2.17. Виртуальный электропривод постоянного тока с функциональной моделью ШИП [1] dc drive ship.
Согласование регуляторов, рассчитанных для машины в относительных величинах с моделью виртуальной машины, осуществлено усилителями в цепи обратной связи (Gain, Gain1). Измерительные приборы измеряют:
- средний ток (I1ср);
- эффективный ток в источнике (I1);
- средний ток транзистора (ITср);
- эффективный ток транзистора (IT).
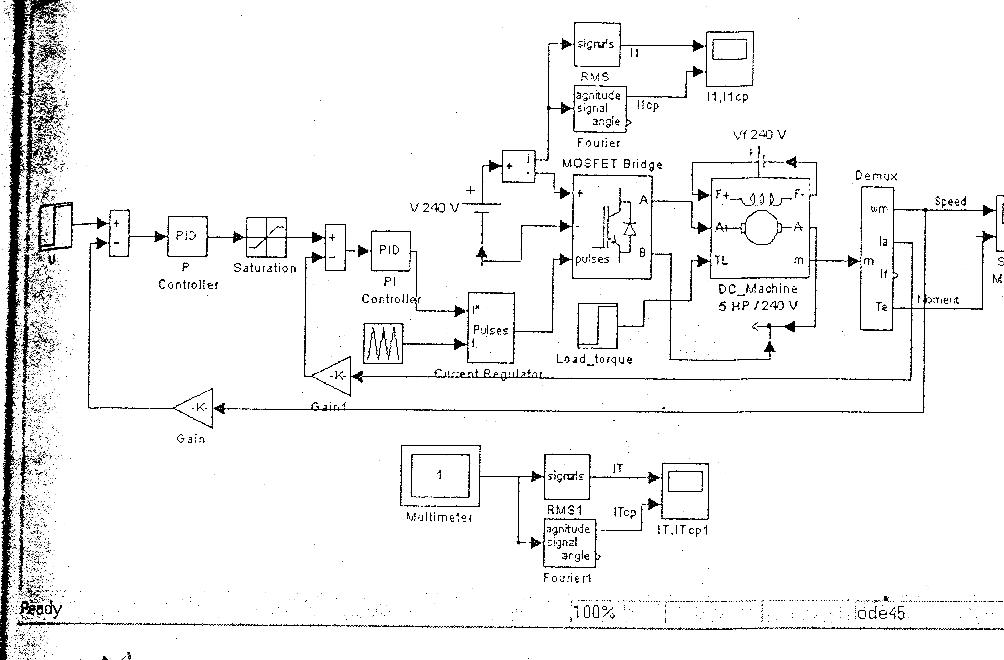
Рис. 2.18.Цифровая виртуальная модель электропривода с ШИП[1] shipdrive.
Описание этих блоков было дано выше при рассмотрении электропривода с управляемым выпрямителем.
Электропривод эт3и
ЭТ3И (реверсивный трехфазный тиристорный электропривод с интегральными микросхемами) [2]. Схема силовой части содержит силовой трансформатор и шесть тириторов, собранных по трехфазной нулевой схеме. С целью получения непрерывных токов в цепи якоря (прерывистые токи ухудшают коэффициент использования двигателя по моменту и усложняют систему управления тиристорами) выбрана схема согласованного управления тиристорами.
Структурная схема электропривода приведена на рис. 2.19а.
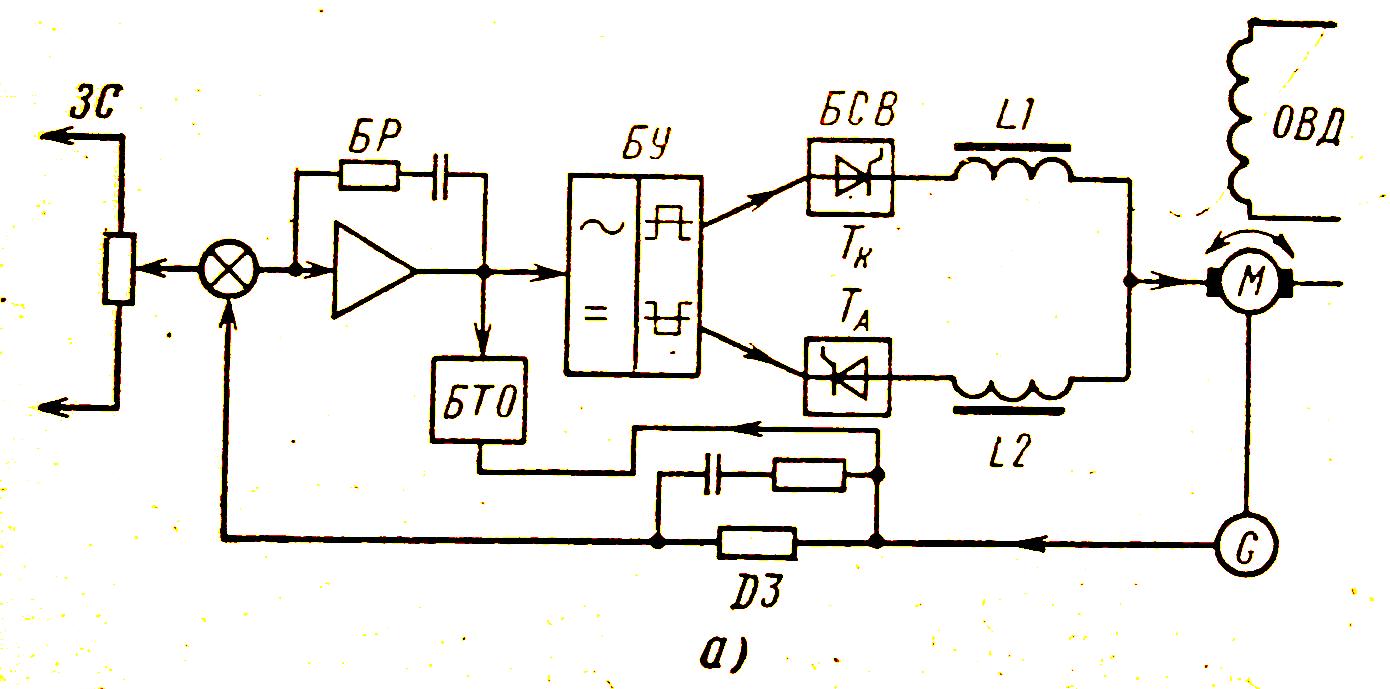
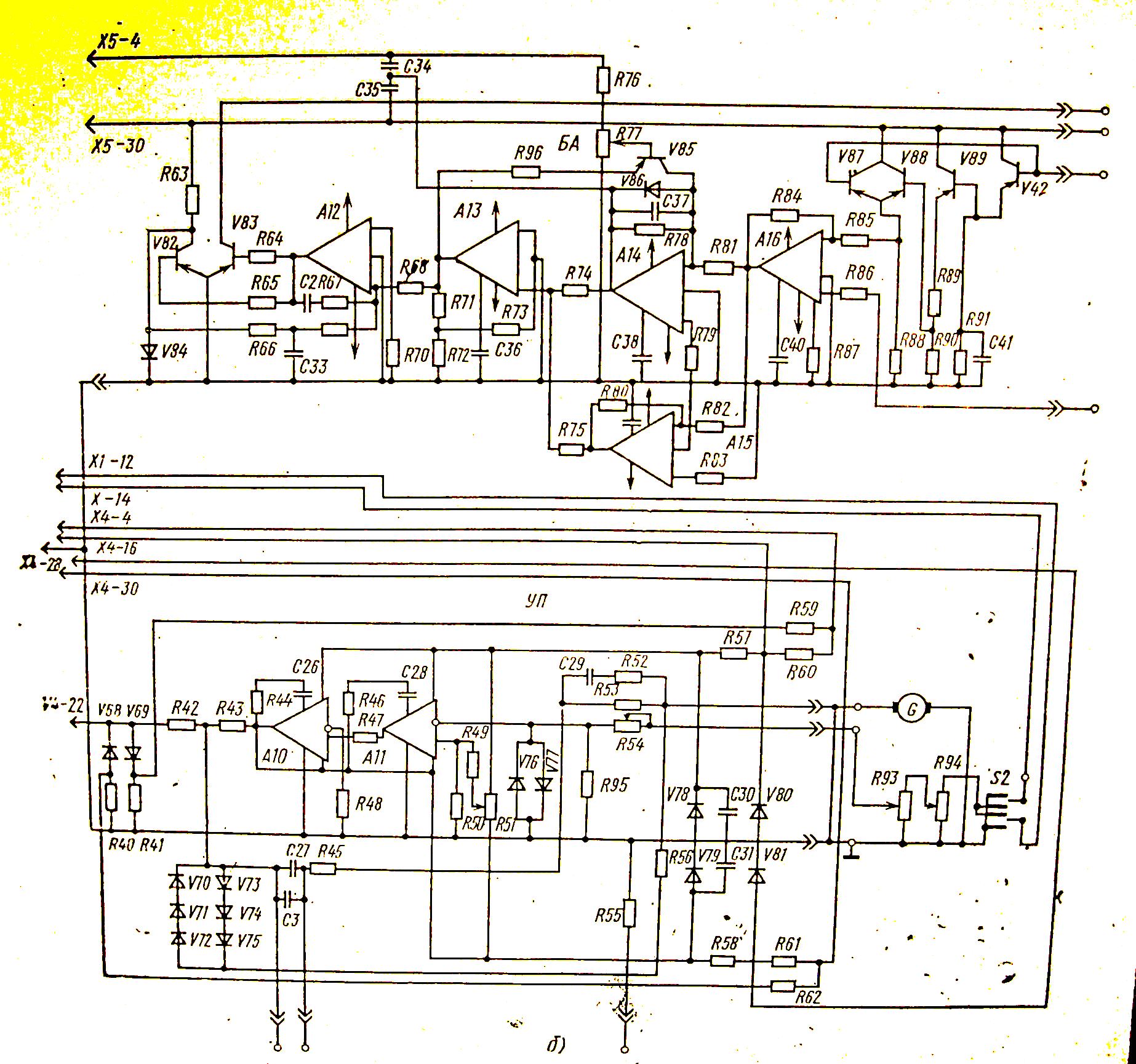
Рис. 2.19. Структурная (а) и принципиальная схемы электропривода серии ЭТ3И.
Электродвигатель постоянного тока питается от блока силовых выпрямителей (БСВ). Он содержит две группы тиристоров – анодную Та и катодную Тк. Для управления углом зажигания тиристоров имеется блок управления БУ, формирующий требуемый
угол α. Блок регулирования БР является одноконтурным с регулятором частоты вращения. На его вход подается разность напряжений задатчика скорости 3С и тахогенератора G. В цепи последнего предусмотрено дифференцирующее звено Д3, служащее для улучшения формы пусковых процессов привода. Блок токоограничения имеет индекс БТО. С целью ограничения величины уравнительных токов включены дроссели L1 и L2.
Принципиальная схема привода дана рис. 2.19б. Силовая часть привода состоит из тиристоров катодной анодной групп, соединенных встречно-параллельно по трехфазной нулевой схеме. Для получения на якоре двигателя выпрямленного напряжения определенной полярности одна из групп переводится в выпрямительный режим, другая – в инверторный. Тиристоры управляются согласованным способом, который характеризуется наличием уравнительных токов.
На вход УП поступает два напряжения, разность которых подается через резисторы R53 и R54 на вход первого операционного усилителя A11. Вход усилителя шунтирован защитными диодами V76 и V77. Цепи R46, C28 и R44, C25 служат для предотвращения самовозбуждения усилителей, цепь R45,C27 – для коррекции системы регулирования.
Операционный усилитель A11 балансируется потенциометром R51 через делитель напряжения. Рабочая точка усилителя A10 определяется резистором R48. Для улучшения качества переходных процессов резистор R53 шунтирован цепью R52, C29. Операционные усилители питаются от БП через цепи двойной стабилизации питающего напряжения. УП содержит цепь упреждающего токоограничения, состоящую из резисторов R55, R56 и диодов V70…V75. Резисторы R55 и R56 образуют делитель напряжения тахогенератора G. К диодам V70…V75 приложено выходное напряжение усилителя A10 и напряжение, идущее от приложенных напряжений превышает пороговое напряжение диодов. Одна из ветвей диодов открывается, шунтируя вход БУ. Силовые тиристоры прикрываются, уменьшая ток нагрузки.
Диоды V68 и V69 и делители напряжения, образованные резисторами R40, R41 и R59, R62, предназначены для ограничения выходного напряжения усилителя A10 до величины, допускающей смещение управляющего импульса не более чем на 60 . Если выходное напряжение превышает норму, то диод V68 или V69 открывается, шунтируя выход усилителя A10.
В БСВ катодную группу представляют тиристоры V32, V36, V40, анодную – V44, V48 и V52. Тиристоры отпираются импульсами положительной полярности, подаваемыми на управляющие электроды со вторичных обмоток импульсных трансформаторов Т2…Т7. Первичные обмотки импульсных трансформаторов питаются от БУ. Вентили V34, V38, V42, V46, V50, V54 предназначены для защиты управляющих электродов тиристоров от отрицательных импульсов. Конденсаторы C7…C12 шунтируют входы тиристоров по высокочастотным составляющим помех.
БУ работает по вертикальному принципу сравнения управляющего напряжения постоянного тока и развертывающего синусов дальнего напряжения. БУ состоит из трех идентичных каналов каждый из которых формирует импульсы управления катодной и анодной группами тиристоров.
Канал управления состоит из узла суммирования, нуль-органа на операционном усилителе А2 и усилителя мощности D1. На вход каждого канала подаются из БП развертывающие синусоидальные напряжения, сдвинутые по фазе на 120 относительно друг друга. Их амплитуда регулируется переменными резисторами R19, R29, R39. Цепи R16, C15, C16 являются частью фазосдвигающей и помехозащищающей цепи. Они предназначены для установки начального угла управления тиристорами.
На входах ОУ А2, А4, А6 происходит суммирование синусоид с постоянной составляющей, получаемой с выхода УП. Работа каналов идентична: суммарный сигнал, состоящий из напряжения синусоиды и напряжения постоянной составляющей, с выхода УП подается на вход А2. В зависимости от величины и знака постоянной составляющей исходного сигнала А2 будет отпираться положительной и отрицательной полуволной напряжения, и на его выходе ширине прямоугольного импульса будет изменяться.
Через диоды V58…V63 замыканием выключателем S1 может быть подано запирающее напряжение для отключения привода. Чтобы получить достаточную крутизну переднего фронта импульсов, резистор R12 охватывает усилитель A2 положительной обратной связью. Обмотка возбуждения двигателя питается от выпрямителя, образованного диодами V22, V23, обратным диодом V24 и резистором R8. О правильности чередования фаз питающей сети сигнализирует лампа H, включенная через цепь R2-R5, C2.
Схема привода представляет собой автоматическую замкнутую систему регулирования частоты вращения с обратной отрицательной связью по частоте вращения двигателя. Система, снабженная корректирующим устройством, создает необходимую жесткость механических характеристик двигателя во всем диапазоне частот вращения и обеспечивает устойчивость и требуемое качество переходных процессов.
При увеличении задающего сигнала напряжения ЗС превышает напряжение тахогенератора G, и результирующий ток открывает усилители A10 и A11 (см. рис. 40б). Усиленный сигнал рассогласования поступает на вход БУ, где перемещается по вертикали синусоиды развертывающих напряжений. Импульсы управления тиристорами сдвигаются так, что уменьшается угол отпирающий анодной (катодной) группы и увеличивается выпрямленное напряжение соответствующей группы. Среднее напряжение якоря возрастает, и частота вращения двигателя увеличивается. Напряжение тахогенератора растет, уменьшая сигнал рассогласования, угол зажигания тиристоров анодной (катодной) группы увеличивается, а катодной (анодной) группы уменьшается, двигатель подзаряжается, и все повторяется снова. Таким образом, фактическая частота вращения колеблется около среднего значения, соответствующего заданному. Для устранения автоколебаний служит цепь коррекции C27, R45, охватывающая усилители A10 и A11.
При увеличении нагрузки двигателя частота его вращения уменьшается. Сигнал рассогласования на входе УП и увеличивая постоянную составляющую на входе БУ. Углы управления тиристорами изменяются так, что среднее значение напряжения якоря увеличивается. Частота вращения двигателя возрастает до тех пор, пока сигнал рассогласования происходит аналогично, но в обратном порядке. Переключатель S2 в режимах реверса переключают в противоположное положение, знак задающего сигнала меняется на обратный. В первый момент напряжения ЗС и G складываются, что приводит к изменению знака и увеличению сигнала рассогласования. Одна группа тиристоров переводится в инверторный режим, и двигатель передает запасенную энергию в сеть. Происходит быстрое рекуперативное торможение двигателя до полной его остановки, затем разгон в противоположном направлении.