

Математическая модель двигателя постоянного тока с последовательным возбуждением.
На рис. 2.7. схематически показан двигатель постоянного тока с последовательным возбуждением [1]. Уравнения, описывающие работу двигателя, имеют вид:
![]() (2.5)
(2.5)
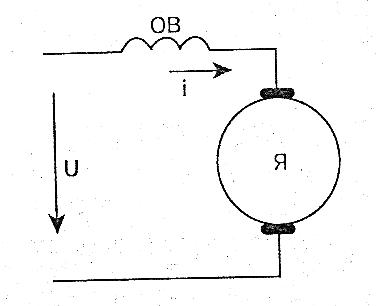
Рис. 2.7. ДПТ с последовательным возбуждением.
![]() (2.6)
(2.6)
уравнения (2.6.) приводятся к безразмерному виду:
![]() (2.7)
(2.7)
где:
![]() - параметры двигателя.
- параметры двигателя.
Представим уравнения (2.7) в операторном виде:
![]() (2.8)
(2.8)
Модель двигателя, построенная по системе уравнений (2.8.) представлена на рис. 2.8.
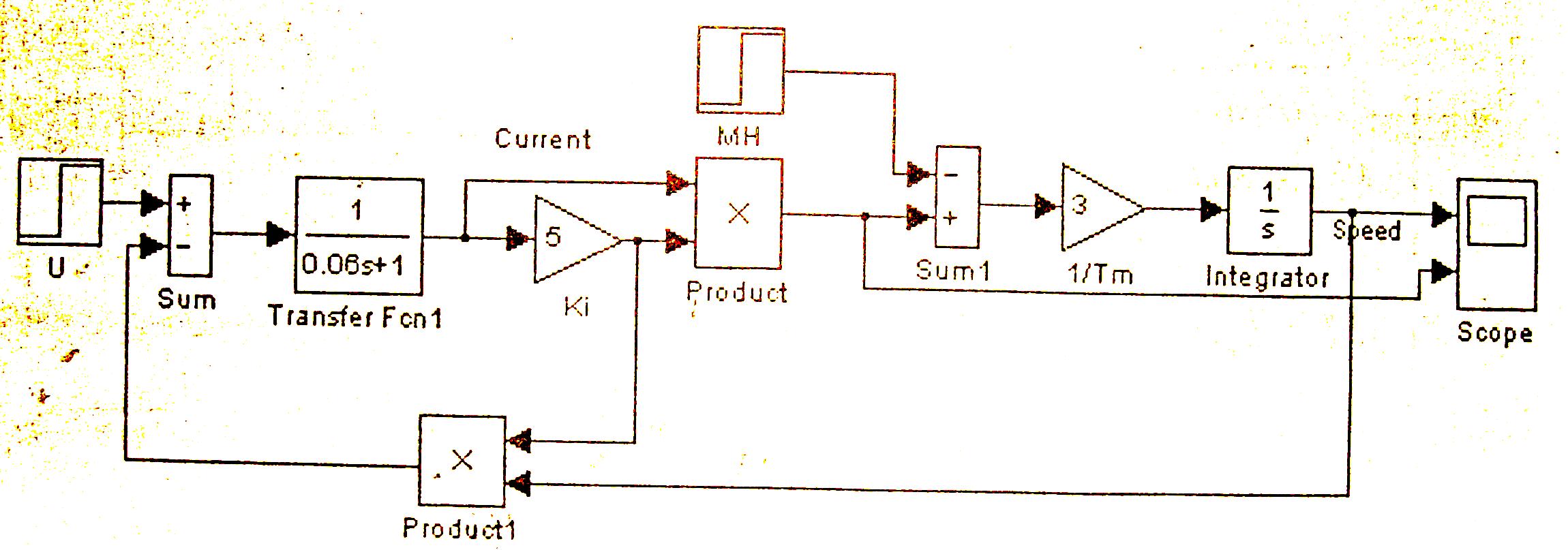
Рис. 2.8. Цифровая виртуальная модель ДПТ с последовательным возбуждением [1] dpt4.
Для исследования механической характеристики построена модель (рис. 2.9.) аналогично ранее описанным вариантам ДПТ.

Рис.2.9. Цифровая виртуальная модель ДПТ с последовательным возбуждением [1] dpt4a.
Электропривод постоянного тока на базе управляемого выпрямителя
На
первом этапе рассмотрим вопросы синтеза
электропривода по «гладкой» составляющей[1].
В этом случае управляемый выпрямитель
может считаться непрерывным апериодическим
звеном с коэффициентом усиления Kув
и малой постоянной времени
![]() .
Кроме того, выходное сопротивление УВ,
равное
.
Кроме того, выходное сопротивление УВ,
равное
![]() ,
включается последовательно с сопротивлением
якоря и тем самым уменьшает электромагнитную
постоянную времени и увеличивает
электромеханическую. Выходная
индуктивность УВ включается также
последовательно с якорем двигателя и
тем самым увеличивает электромагнитную
постоянную времени. Для конкретных
случаев всегда можно оценить результирующие
постоянные времени системы (УВ -
двигатель). При синтезе регуляторов
тока и скорости будем исходить из общих
положений, изложенных в гл. 1. Если принять
за малую некомпенсированную постоянную
времени
,
включается последовательно с сопротивлением
якоря и тем самым уменьшает электромагнитную
постоянную времени и увеличивает
электромеханическую. Выходная
индуктивность УВ включается также
последовательно с якорем двигателя и
тем самым увеличивает электромагнитную
постоянную времени. Для конкретных
случаев всегда можно оценить результирующие
постоянные времени системы (УВ -
двигатель). При синтезе регуляторов
тока и скорости будем исходить из общих
положений, изложенных в гл. 1. Если принять
за малую некомпенсированную постоянную
времени
![]() ,
то регулятор тока должен быть
пропорционально-интегральным с
передаточной функцией
,
то регулятор тока должен быть
пропорционально-интегральным с
передаточной функцией
![]() (2.9)
(2.9)
При
настройке скоростной системы на оптимум
по модулю регулятор скорости должен
иметь передаточную функцию пропорционального
звена с коэффициентом передачи
![]() .
Тогда передаточная функция разомкнутой
и замкнутой системы будут иметь вид:
.
Тогда передаточная функция разомкнутой
и замкнутой системы будут иметь вид:
 (2.10)
(2.10)
оптимум
по модулю достигается при
![]()
С учетом вышесказанного на рис. 2.10. показана модель электропривода с управлением по цепи якоря от УВ по «гладкой» составляющей. Параметры регуляторов, рассчитанные в соответствии с вышеизложенным, составили:
- для регулятора тока = 7, =300;
- для регулятора скорости = 50.
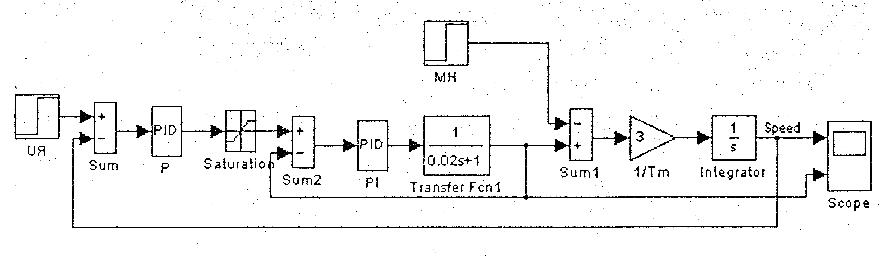
Рис. 2.10.Цифровая виртуальная модель электропривода постоянного тока [1] dp drive.
Переходный процесс «в малом», по управлению электропривод настроен на оптимум по модулю. По возмущению электропривод является статическим, поэтому наблюдается провал скорости при приложении момента нагрузки. Если такая характеристика по возмущению не удовлетворит проектировщиков, то в качестве регулятора скорости следует выбрать ПИ-регулятор и настроить электропривод по скорости на симметричный оптимум.
В этом случае передаточная функция регулятора скорости будет иметь вид:
![]() (2.11)
(2.11)
а постоянные Т1 и Т2 определяются из выражений
![]() (2.12)
(2.12)
На рис. 2.11а показана модель замкнутого электропривода, а на рис. 2.11б модель УВ, построенная на базе функциональной схемы. Такая модель может быть использована для исследования динамических процессов в системе с УВ. Но она не удобна (хотя может быть использована) для исследования электромагнитных и энергетических процессов УВ, включенного в эту систему. Использование функциональной модели целесообразно при исследовании динамики системы «в малом». Она позволяет учесть специфику УВ и уточнить параметры регуляторов. Использование виртуальной модели в этом смысле оказывается достаточно неудобным, так как время моделирования в системе с виртуальной моделью значительно превышает время моделирования с функциональной моделью.


Рис. 2.11.Цифровые виртуальные функциональные модели электропривода (а) (б)с УВ [1] dc drive.
Виртуальная модель электропривода с УВ показана на рис. 2.12. Модель содержит виртуальную машину постоянного тока, трехфазный двухполупериодный УВ, виртуальный блок управления УВ и систему управления, регуляторы которой реализованы в соответствии с положениями, изложенными выше. При этом необходимо согласовать схему управления с регуляторами, рассчитанными в базе относительных (безразмерных) параметров с виртуальной моделью машины, реальные параметры которой задаются в его окне
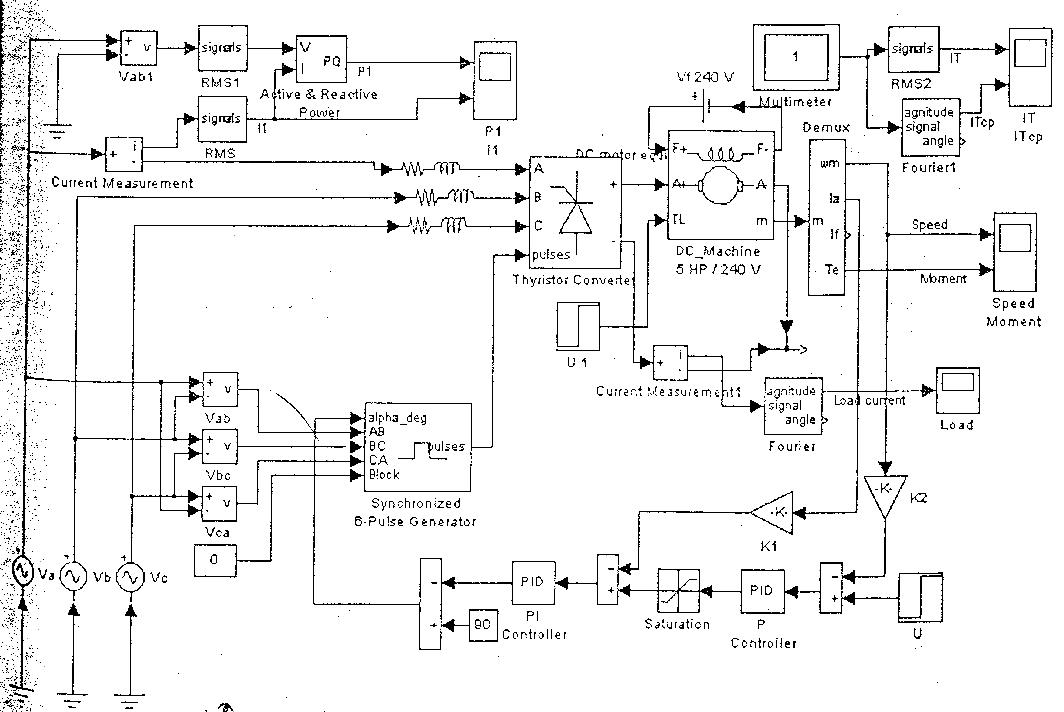
Рис. 2.12.Цифровая виртуальная модель электропривода с УВ [1] crdrive.
настройки. Это делается очень просто. Для этого реальный ток двигателя из блока измерения делится на ток базовый, а реальная скорость делится на скорость базовую. В модели на рис. 2.12. этой цели служат усилители К1 и К2.
Эту модель рекомендуется использовать для исследования энергетических характеристик электропривода. Ранее указывалось на то, что исследование энергетических характеристик следует осуществлять при анализе переходных процессов «в большом», с реализацией трех типовых режимов работы:
- режима пуска с выходом на ограничения, заложенные в систему;
- режима холостого хода;
- режима работы номинальной и энергетических характеристик, как это следует из материалов гл.2, необходимо измерить:
- эффективный ток в сети, питающий УВ;
- средний и эффективный токи в тиристоре УВ;
- средний ток в нагрузке.
Этим целям служат специальные измерительные приборы, имеющиеся в дополнительной библиотеке инструментов Power System Blockset. Приборы, служащие для измерения эффективных токов (блоки RMS рис. 2.12.), включены в питающую сеть через блок измерения тока и в цепь тиристора УВ посредством блока Multimeter.