

Электромагнитный момент асинхронной машины
Электромагнитный момент возникает при наличии магнитного поля, создаваемого обмоткой статора, и тока в обмотке ротора. Можно показать, что электромагнитный момент определяется соотношением:
M=CΦI2cosψ2.
Здесь:
 –
–
конструктивный коэффициент; ω0=2πf/p – скорость вращения магнитного поля; ψ2 – сдвиг по фазе между ЭДС и током ротора; I2cosψ2 – активная составляющая тока ротора.
Регулирование частоты вращения асинхронных двигателей
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
n=(1−S)n0=(1−S)60f/p.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
Изменение частоты источника питания
В качестве таких источников питания в настоящее время начали находить применение преобразователи частоты (ПЧ), выполняемые на мощных полупроводниковых приборах – тиристорах. Из уравнения трансформаторной ЭДС U1=4,44w1k1fΦ следует, что для сохранения неизменным магнитного потока, т.е. для сохранения перегрузочной способности двигателя, необходимо вместе с частотой изменять и действующее значение подведенного напряжения. При выполнении соотношения U1/f1=U'1/f'1, критический момент не изменяется и получается семейство механически характеристик, представленное на рис.

Механические характеристики при частотном регулировании
3. Электродвигатели переменного тока синхронные (сд)
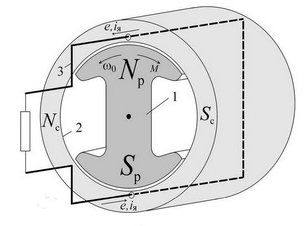
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше
![]()
Двигательный
режим. В двигательном режиме неподвижная
статорная обмотка должна создавать
вращающееся магнитное поле. Для этого,
как мы уже знаем, она должна быть
многофазной, распределенной в пространстве
и питаться многофазной системой токов.
При этом для взаимодействия полей
статора и ротора количество пар полюсов
на них должно быть одинаково. Тогда к
вращающимся со скоростью![]() полюсам статора Nс и Sс притянутся
соответствующие полюса ротора
противоположной полярности Nр и Sр и
будут вращаться вместе с ними с той же
скоростью
полюсам статора Nс и Sс притянутся
соответствующие полюса ротора
противоположной полярности Nр и Sр и
будут вращаться вместе с ними с той же
скоростью ![]() (например, как на рис.а).
(например, как на рис.а).

При отсутствии момента внешней нагрузки Мс оси полюсов ротора 1 и статора 2 совпадают и в идеале двигатель не развивает электромагнитного момента (реально развивает момент, покрывающий потери). Если же к валу двигателя приложен внешний момент Мс, под действием этого момента ротор отклоняется в сторону отставания по отношению к направлению движения на некоторый угол Θ. На полюса ротора действует электромагнитный момент М, направленный в сторону движения и стремящийся выравнить оси полюсов (рис. б). Этот момент уравновешивает момент внешних сил Мс. Однако полюса ротора отставая от полюсов статора на угол Θ, при этом вращаются по-прежнему со скоростью . Таким образом, в синхронной машине полюса ротора связаны с полюсами статора так называемой «магнитной пружиной», которая «сжимается» или «растягивается» в зависимости от нагрузки на валу. При этом средняя скорость вращения ротора всегда равна скорости вращения поля статора.
Марки двигателей:
4СХ2П (С – означает синхронный).
I
Двигательный режим ![]()
II
Генераторный режим ![]()

![]()
![]()
P=1.
Если
![]() ,
то не получим требуемую частоту 50 Гц.
,
то не получим требуемую частоту 50 Гц.
Шаговые электродвигатели.
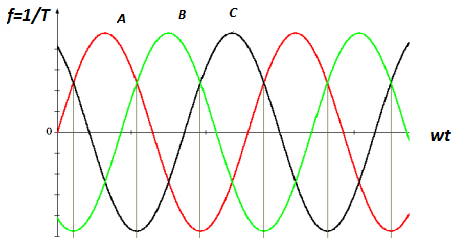
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемое шагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения

Схемы работы шагового двигателя при питании различных фаз обмотки якоря

Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах
![]() - самый важный параметр. Величина шага.
Это угол поворота ротора, отвечающий
одному импульсу напряжения,
- самый важный параметр. Величина шага.
Это угол поворота ротора, отвечающий
одному импульсу напряжения,
![]() - число фаз,
- число фаз,
![]() - число зубцов.
- число зубцов.
 , где
, где
![]() - угол между намагниченностью вектора
стартера и намагниченностью вектора
ротора.
- угол между намагниченностью вектора
стартера и намагниченностью вектора
ротора.
 Скорость вращения.
Скорость вращения.
![]() – угол поворота шагового двигателя
– угол поворота шагового двигателя
Nи – число импульсов.
Предельная динамическая механическая характеристика шагового двигателя

 ( 2000 Гц) – частота приемистости –
это наибольшая частота управляющих
импульсов, при которых ротор ещё может
входить в синхронизм с местом, не теряя
шага
( 2000 Гц) – частота приемистости –
это наибольшая частота управляющих
импульсов, при которых ротор ещё может
входить в синхронизм с местом, не теряя
шага