

Методичні вказівки
До п. 1.
Під час виконання даного пункту завдання керуватися методичними вказівками до лабораторної роботи №2, де містяться пояснення до побудови діаграм Найквіста та ЛАЧХ/ФЧХ.
|
Звернути увагу на те, що будувати діаграми частотних характеристик потрібно для розімкненої системи. |
Для знаходження сумарної передатної функції замкненої системи в програмі MathCAD зручно використовувати ключові слова (набираються відповідними кнопками на панелі інструментів) засобів символьної математики expand (розкрити вираз) і collect (розібрати за степенями вказаної змінної). Залежно від складності результуючого виразу замкненої передатної функції інколи достатньо лише ключового слова simplify (спростити вираз), як показано нижче.
або
|


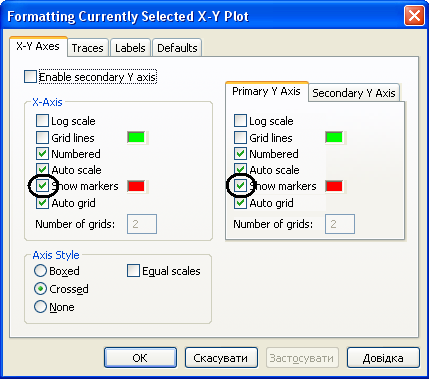
Лінії одиничного підсилення та фазного зсуву 180º розімкненої системи, які використовуються для оцінки області стійкості замкненої системи, найпростіше відображати за допомогою маркерів графіка, які можна увімкнути вибором відповідного пункту першої закладки діалогового вікна форматування графіка (див. нижче). Врахувати, що кут комплексної змінної (фазу) функції MathCAD подають у радіанах.
Для побудови перехідної характеристики за допомогою числового методу (функції rkfixed, Rkadapt чи блок розв'язування Given … Odesolve) потрібно перейти від передатної функції замкненої системи до системи звичайних диференціальних рівнянь (для функцій rkfixed, Rkadapt тощо – записаних у нормальній формі Коші).
Одним зі способів створення системи
диференціальних рівнянь є застосування
опису системи в т. н. канонічній формі
керованості. У цьому випадку система з
передатною функцією
 описуватиметься структурною схемою
рис. 2.
описуватиметься структурною схемою
рис. 2.

Рис. 2. Структурна схема канонічної форми спостережності
Такій структурній схемі відповідатиме система звичайних диференціальних рівнянь першого порядку, записана в нормальній формі Коші, в якій використано позначення: x(t) – вхідний сигнал (збурення); y1 , … , yn – проміжні змінні (змінні стану), і яка матиме вигляд:
![]()
У випадку наявності в чисельнику
передатної функції лише пропорційної
складової (поліном чисельника має
нульовий порядок):
![]() система описуватиметься диференціальним
рівнянням n-го порядку:
система описуватиметься диференціальним
рівнянням n-го порядку:
![]() ,
,
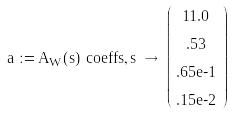
яке розв'язується в середовищі MathCAD за допомогою блоку Given … Odesolve, як показано нижче на прикладі з використанням функцій аналітичної математики numer (як результат повертає вираз для чисельника) і denom (як результат повертає вираз для знаменника) для отримання коефіцієнтів диференціального рівняння.
Знаходимо сумарну передатну функцію замкненої системи
Знаходимо поліноми чисельника і знаменника та їхні коефіцієнти
Розв'язуємо диференціальне рівняння з нульовими початковими умовами
|



До п. 2.
Д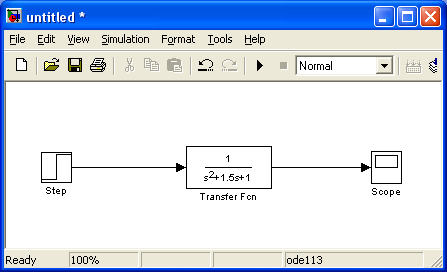 ля
використання додатку LTIViewer
середовища MATLAB з метою
дослідження частотних характеристик
лінійної моделі в середовищі Simulink
потрібно задати вхідну і вихідну точки.
Для цього після побудови моделі у вікні
Simulink в пункті меню Tools
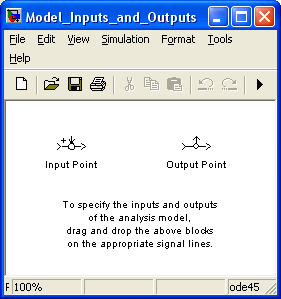
вибрати підпункт Linear Analysis…, внаслідок
чого з'явиться вікно з двома елементами
– вхідною та вихідною точками лінійної
моделі, які потрібно вставити у потрібне
місце (на вхід досліджуваної системи
та на її вихід) простим перетягуванням
мишкою в робоче вікно Simulink.
ля
використання додатку LTIViewer
середовища MATLAB з метою
дослідження частотних характеристик
лінійної моделі в середовищі Simulink
потрібно задати вхідну і вихідну точки.
Для цього після побудови моделі у вікні
Simulink в пункті меню Tools
вибрати підпункт Linear Analysis…, внаслідок
чого з'явиться вікно з двома елементами
– вхідною та вихідною точками лінійної
моделі, які потрібно вставити у потрібне
місце (на вхід досліджуваної системи
та на її вихід) простим перетягуванням
мишкою в робоче вікно Simulink.
Таким чином, для використаного прикладу матимемо.

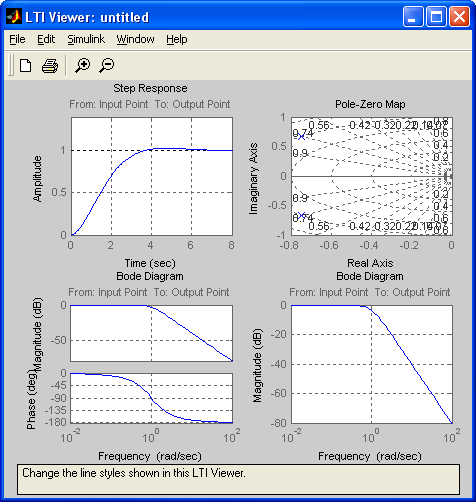
Після цього у вікні LTI
Viewer, яке відразу з'являється
після цього, вибирається пункт меню
Simulink
 Get
Linearized Model. На виконання даної команди
LTI Viewer будує
один з графіків (за замовчуванням –
перехідну характеристику системи), а
конкретну конфігурацію виведеної
інформації у вигляді графіків можна
змінити за допомогою пункту меню Edit
Plot
Configurations… згідно свого варіанту
завдання. Сітка на графіках наноситься
натисканням правої кнопки "мишки"
і вибором пункту
Grid .
Get
Linearized Model. На виконання даної команди
LTI Viewer будує
один з графіків (за замовчуванням –
перехідну характеристику системи), а
конкретну конфігурацію виведеної
інформації у вигляді графіків можна
змінити за допомогою пункту меню Edit
Plot
Configurations… згідно свого варіанту
завдання. Сітка на графіках наноситься
натисканням правої кнопки "мишки"
і вибором пункту
Grid .
Отримані в LTI Viewer графіки копіюються у документ MS Word за допомогою пунктів меню графічного вікна MATLAB Edit Copy Figure з наступним вставлянням у текстовий документ натисканням клавішних комбінацій Ctrl + C чи Ctrl + Ins або вибором "мишкою" відповідної іконки на панелі інструментів.
Отримані графіки допускають додаткове редагування, зокрема, за допомогою натискання правої кнопки мишки можна змінити тип графіка, вибрати одну з декількох досліджуваних систем, нанести сітку тощо.

*) У застосунку MathCAD уявні числа задаються записом безпосередньо після уявної частини (без знаку множення чи прогалини) символу "i" або "j". Таким чином, уявна одиниця записується як 1i або 1j, при цьому під час відображення документу MathCAD власне цифра "1" зникає і з'являється лише після наведення курсору на поле виразу.
*) Перехідною характеристикою h(t) системи називається її реакція на одиничний стрибок 1(t), який має відображення за Лапласом 1/s.