

1.2 Коэффициенты полезного действия
В механизмах в качестве опор используют подшипники качения. КПД таких механизмов с учетом потерь в опорах следующие:
hц.п. = 0,93 – периодически смазываемая цепная передача;
hо.п. = 0,95 – открытая зубчатая пара;
hц. = 0,99 – закрытая цилиндрическая пара;
hк. = 0,98 – закрытая коническая пара;
hч. = 0,9 – (I-u/200) – закрытая червячная пара, где u – передаточное число (u>1);
hбл. = 0,97 – канатный блок;
hбар. = 0,98 – барабан;
hм. = 0,99 – муфта;
В значениях КПД барабанов и блоков учтены также потери на перегиб каната.
1.4 Электропривод Тип двигателя
При номинальной мощности Pн двигателя менее 1,4кВт или при управлении с пола применяют двигатели типа 4АС (трехфазные асинхронные повышенного скольжения); при мощности Рн>= 1,4кВт и при управлении из кабины – крановые двигатели типа MTF или MKTF.
Для привода механизма подъема электротали при установке внутри барабана используют встроенные двигатели типа 4АСВ, в остальных случаях – двигатели типа 4АС.
Применение для кранов трехфазных асинхронных двигателей единой серии 4А основного исполнения и с повышенным пусковым моментом во всех случаях недопустимо.
Синхронная частота вращения nc=1000об/мин является наиболее рациональной и предпочтительной; nc=750об/мин допустима в крайнем случае, если расчетное передаточное отношение превышает передаточное отношение стандартных приводов; nc=1500об/мин используют редко, но имеется тенденция ее более широкого применения.
В![]() ремя
пуска (разгона), с,
ремя
пуска (разгона), с,
Г![]() де
Jпр.п. – приведенный
к валу электродвигателя момент инерции
при пуске (его определение по механичезмам
дано ниже), кг*м2; nн=nдв
– номинальная частота вращения
электродвигателя (по каталогу), об/мин;
Tн = 9550Pн/nн
– номинальный момент двигателя, Н*м; Рн
– номинальная мощность двигателя при
ПВ = 40%; tп.о. –
относительное время пуска:
де
Jпр.п. – приведенный
к валу электродвигателя момент инерции
при пуске (его определение по механичезмам
дано ниже), кг*м2; nн=nдв
– номинальная частота вращения
электродвигателя (по каталогу), об/мин;
Tн = 9550Pн/nн
– номинальный момент двигателя, Н*м; Рн
– номинальная мощность двигателя при
ПВ = 40%; tп.о. –
относительное время пуска:
Для двигателей с короткозамкнутым ротором (4АС, MKTF)
Д![]() ля
двигателей с фазовым ротором (MTF)
ля
двигателей с фазовым ротором (MTF)
Здесь m = Tmax/Tн – кратность максимального момента двигателя, принимается по каталогу; a=Pст/Рм – коэффициент загрузки двигателя по мощности (Рст - статическая мощность установившегося движения).
Расчет на нагрев
Двигатели выбирают с учетом ПВ. При выполнении курсового проекта и домашних заданий не требуется рассчитывать из на нагрев.
1.5 Гидропривод
Рабочее давление гидропривода выбирают по табл. 3.
Таблица 3
P, МПа (Н/мм2) |
6,3 |
10 |
16 |
25 |
Предпочтительными являются давления, равные 10 и 1 Н/мм2.
Цилиндры стандартизированы, их диаметры D следует выбирать по ГОСТ 6636-80, обычно d»0,7D (Рис. 1)
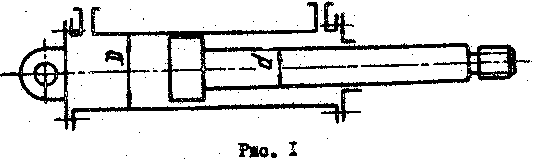
Сила, развиваемая гидроцилиндром при подаче жидкости:
![]() Со
стороны порншя
Со
стороны порншя
![]() Со
стороны штока
Со
стороны штока
Расход жидкости при подаче жидкости:
![]() Со
стороны поршня
Со
стороны поршня
![]() Со
стороны штока
Со
стороны штока
Где u - скорость движения поршня.
Гидродвигатели
Высокооборотные гидродвигатели компактны и дешевы. Однако при их использовании необходимо применять редуктор для понижения частоты вращения. Тихоходные высокомоментные гидродвигатели тяжелее и дороже высокооборотных, но позволяют исключить редуктор и поэтому предпочтительнее.
Для механизмов поворота неполноповоротных кранов целесообразно использовать неполноповоротные лопастные гидродвигатели или гидроцилиндры, приводящие в движение рейку и находящееся с ней в зацеплении зубчатое колесо, соединенное с поворотной частью крана.
Гидродвигатель при заданном давлении р выбирают по крутящему моменту Т и частоте вращения вала n.
Насосы
Насос может обслуживать один или несколько цилиндров и гидродвигателей. Последовательная работа механизмов позволяет уменьшить расход жидкости Vж, производительность насоса Vмас, размеры насоса и двигателя. В этом случае насос выбирают по давлению р и тому цилиндру или гидродвигателю, для которого требует наибольший расход жидкости по условию Vмас>=1,1Vж. Остальные механизмы при этом будут работать со скоростями, большими расчетных. Если это недопустимо, то следует увеличивать диаметр цилиндра, который приобретает избыточное усилие, или применить регулируемый насос. Необходимо учитывать, что регулируемый насос существенно дороже нерегулируемого.
Системы управления
Управление подачей жидкости осуществляется либо непосредственно с помощью трубопроводного крана, либо дистанционно золотниками, имеющими электромагнитный привод. При избыточном давлении часть масла сбрасывается в бак через предохранительный клапан.
Двигатель гидронасоса
Статическая мощность, кВт
![]()
где p-давление, МПа; Vнас – производительность насоса, м3/c; h=0,9 – КПД.
Выбор двигателя проводят по условию: у выбранного в соответствии с ПВ двигателя Pдв>=Pст.
1.6 Тормоза
Колодочный тормоз
![]() При
проектировании колодочного тормоза
(рис.2)диаметр шкива находят по формуле,
мм
При
проектировании колодочного тормоза
(рис.2)диаметр шкива находят по формуле,
мм
где T– момент трения тормоза, Н*мм, [p] – допускаемое давление (табл.4).
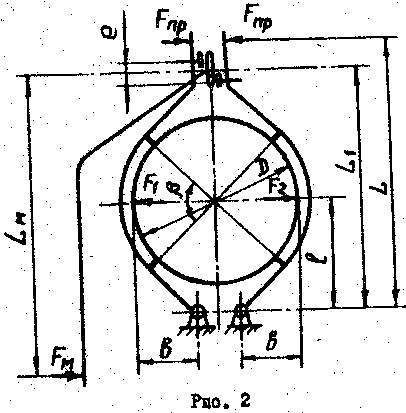
Таблица 4
Группа режима |
1М |
2М |
3М |
4М |
5М |
6М |
[p],Мпа |
0,35 |
0,30 |
0,25 |
0,20 |
0,15 |
0,10 |
Диаметр шкива округляют до значений, приведенных далее в табл. 6.
Ширина колодки В=(0,314…0,4)D.
Если диаметр шкива D принят больше расчетного, то выбирается меньшее значение В, если меньше расчетного, то наоборот. Шкив делают на 3..5мм шире колодки.
Силы прижатия колодок (см. рис2)
![]()
Если колодки крепятся к рычагам шарнирно, то размер b берут от оси шарнира колодки до оси поворота рычага. Желательно принимать b=0; при этом F1=F2, и радиальная нагрузка на вал шкива отсутствует. Коэффициент трения фрикционных обкладок без смазки по чугуну и стали f=0.42.
Во избежание задира стальные шкивы должны иметь твердость рабочей поверхности HB>=250.
![]() Площадь
колодок
Площадь
колодок
Рекомендуется принимать b=90°. Давление на фрикционных обкладках p=F1/A<=[p]. Если b¹0, то давление р может быть больше приведенного в табл.2 допускаемого [р] на 25%, так как при реверсе точки приложения сил F1 и F2 меняются местами.
Сила сжатия пружины.
![]()
КПД рычажной системы тормоза h»0,95. Начальный отход колодок от шкива(мм) eнач=0,3+0,002D. Наибольший отход колодок за счет износа (мм) eмах=1,6eнач.
Работа, совершаемая электромагнитом для преодоления Fпр
![]()
где, Fм – тяговая сила электромагнита, Н; sм – его ход, мм.
![]() Расстояние
между осями регулировочных винтов
Расстояние
между осями регулировочных винтов
При выборе другой кинематической схемы тормоза алгоритм для определения сил студент разрабатывает самостоятельно.