

Механизмы стимулирования в организационных системах - Новиков Д.А
..pdfсуществует линейная связь (то есть результат деятельности y пря- мо пропорционально рабочему времени τ). Если результат дея- тельности агента, достигаемый за единицу времени, зависит от количества уже отработанных часов, то между повременной и сдельной оплатой существуют различия.
Вработах зарубежных исследователей по экономике труда
[17]обычно принимается следующий вид зависимости между результатами деятельности y и текущей продолжительностью
рабочего времени τ (см. рисунок 29). На рисунке 30 изображен
график производной |
dy(τ ) |
кривой y(τ) – кривая производительно- |
|
dτ |
|
сти деятельности агента (результат деятельности, достигаемый в единицу времени).
Содержательно, низкая производительность в начале рабочего дня обусловлена эффектом «врабатывания» (или адаптации) – агент переключается (промежуток времени [0; τ1]) на новый (по сравнению, например, с отдыхом) вид деятельности – работу. Постепенно производительность растет (промежуток времени [τ1; τ2], достигая максимума в момент времени τ2 (или в более общем случае в некотором интервале времени). Затем, после мо- мента времени τ2, начинает сказываться, например, усталость, и производительность начинает убывать.
|
|
y |
|
|
dy(τ ) |
|
|
|
|
||
y3 |
|
|
|
|
dτ |
|
|
|
|
|
|
y2 |
|
|
|
|
|
y1 |
|
τ |
|
|
τ |
|
|
τ1 τ2 τ3 |
|
|
τ1 τ2 τ3 |
0 |
0 |
||||
Рис. 29. Зависимость результата |
Рис. 30. Производительность |
||||
(кумулятивного) деятельности |
|
|
деятельности агента |
||
|
|
агента от времени |
|
|
|
81
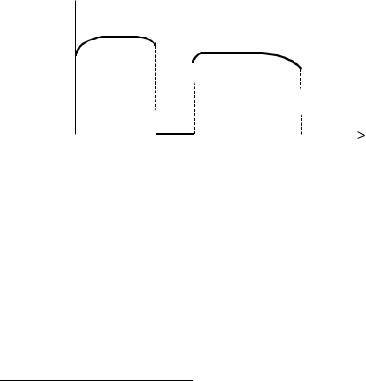
В многочисленных исследованиях (проведенных в основном в доперестроечный период) также встречаются кривые (зависимости производительности труда от времени в течение рабочего дня1) типа приведенных на рисунке 30. Эскиз графика характерной зависимости производительности труда рабочих (с учетом переры- ва на обед) от времени изображен на рисунке 31 (нулевой момент времени соответствует началу рабочего дня; во время обеденного перерыва – на интервале [τ1; τ2] – производительность равна нулю; момент времени τ3 соответствует окончанию рабочего дня). Со- держательные интерпретации участков возрастания, постоянства и убывания производительности труда очевидны.
 dy dτ
dy dτ
τ
|
|
|
|
0 |
τ1 |
τ2 |
τ3 |
Рис. 31. Зависимость производительности труда
от времени в течение рабочего дня
Нелинейное изменение результата деятельности агента во времени позволяет выделить два «типа» агентов, которых следует оплачивать по-разному. Поясним последнее утверждение. Если принять, что функция затрат агента имеет вид, изображенный на рисунке 29, то при использовании центром компенсаторной систе-
мы стимулирования кривые безразличия агента могут касаться кривой бюджетного ограничения в одной из двух характерных точек – точке А, в которой кривая бюджетного ограничения вогну- та (первый «тип»), или в точке В, в которой кривая бюджетного
1 Следует отметить, что и отечественными, и зарубежными учеными исследо-
вались зависимости производительности труда от времени не только в течение рабочего дня, но и в течение рабочей недели, месяца, года и т.д.
82
ограничения выпукла (второй «тип» – см. рисунок 32). Выделен-
ным двум типам агентов соответствуют разные семейства кривых безразличия: агенты первого типа по сравнению с агентами второ- го типа выше ценят доход, а агенты второго типа – свободное время.
|
q |
|
A |
|
A’ |
|
В’ |
|
В |
|
t, τ |
0 |
T |
|
|
|
Рис. 32. Два «типа» агентов |
Если цель центра заключается в том, чтобы при минимальном вознаграждении агента побуждать его к увеличении продолжи- тельности рабочего времени, то для агентов первого типа следует использовать повременную систему (пропорциональную, в кото- рой показателем является продолжительность рабочего дня) сти- мулирования, а для агентов второго типа – сдельную (компенса- торную, в которой показателем является результат деятельности) – см. горизонтальные прямые и точки А, А’ и В, В’ на рисунке 32.
Системы стимулирования D-типа. Напомним, что в системах стимулирования, основанных на перераспределении дохода, возна- граждение агента пропорционально (с коэффициентом пропорцио- нальности не зависящим от действия агента) доходу центра H(y), который зависит от действия агента, то есть σD(τ) = ξ H(τ),
ξ [0; 1].
Если функция дохода центра вогнутая (что обычно предпола- гается как в теоретико-игровых, так и в экономических моделях), то функции σD(τ) и σ~D (t) также являются вогнутыми. На рисунке
33 изображены функции стимулирования σD(τ) и σ~D (t), а также
83
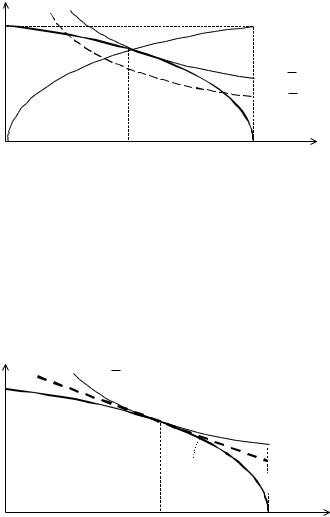
кривая безразличия, |
соответствующая максимальному значению |
||
|
|
|
~ |
полезности агента (эта кривая касается кривой σ D (t) в точке А). |
|||
|
q |
|
|
|
~ |
|
sD(t) |
|
|
|
|
|
σ D (t) |
|
A |
|
|
|
|
|
|
|
g ³ U |
|
|
|
g = U |
|
|
|
t, t |
0 |
|
T/2 t* |
T |
|
Рис. 33. Функция стимулирования D-типа |
||
Вогнутые функции стимулирования.
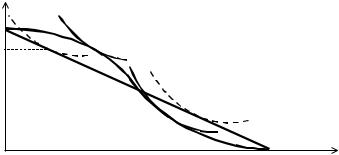
Пусть функция стимулирования (бюджетное ограничение) во- гнутая, а кривая безразличия агента – выпуклая (см. рисунок 34).
Тогда для данной системы стимулирования можно произвести линеаризацию (см. выше), то есть найти неотрицательную систему стимулирования L+C-типа, реализующую то же действие, что и исходная система стимулирования. Величина qT называется нетру- довым доходом (она равна доходу агента при нулевом рабочем времени).
q |
g ³ U |
|
|
~ |
|
|
|
|
σ (t) |
|
|
|
|
A |
|
|
|
qT |
a |
~ |
* |
) |
|
||||
|
|
σ L+C (t |
|
|
|
|
t, t |
||
0 |
t* |
T |
|
|
|
Рис. 34. Линеаризация вогнутой функции |
|
|
|
|
стимулирования |
|
|
|
84

Итак, рассмотрено описание основных базовых систем стиму- лирования в терминах экономики труда. Используя полученные результаты, легко получить аналогичные описания для остальных базовых систем стимулирования. Проиллюстрируем возможность переноса на примере составных и суммарных систем стимулирова- ния.
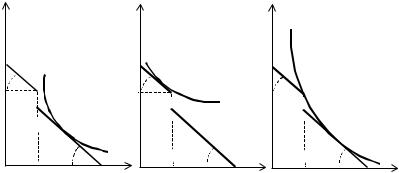
Системы стимулирования LL-типа (составные). Напомним, что составной системой стимулирования LL-типа называется такая система стимулирования, в которой агент поощряется пропорцио- нально действию, причем на различных участках множества воз- можных действий A = [0; T] коэффициенты пропорциональности α1 и α2 различны. Так как выше было показано, что оптимальная система стимулирования должна быть возрастающей и выпуклой, то рассмотрим случай, когда 0 < α1 ≤ α2 (при α1 = α2 получим подробно рассмотренную выше систему стимулирования L-типа).
Условием оптимальности является равенство ставки оплаты и альтернативной стоимости одного часа досуга. Следовательно, возможны три варианта – кривая безразличия полезности агента касается бюджетной кривой, имеющей вид ломаной, либо на ли- нейном участке с углом наклона α1 (точка А – см. рисунок 35), либо на линейном участке с углом наклона α2 (точка В – см. рису- нок 36), либо на обоих участках сразу (точки А и В – см. рисунок 37) – см. также описание систем стимулирования LL-типа.
q |
|
|
q |
|
|
q |
|
|
|
|
|
|
|
В |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
α2 |
|
|
α2 |
|
|
α2 |
|
|
|
|
A |
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
α1 |
|
t |
α1 |
|
t |
|
α1 |
t |
0 |
x |
T |
0 |
x |
T |
0 |
x |
|
T |
|
Рис. 35 |
|
|
Рис. 36 |
|
|
|
Рис. 37 |
|
|
|
Система стимулирования LL-типа |
|
|
|||||
85
Системы стимулирования L+C-типа (суммарные). Напомним, что суммарной системой стимулирования L+С-типа называется такая система стимулирования, при использовании которой агент поощряется пропорционально действию, причем, если его дейст- вие (количество отработанных часов) превышает норматив x, то ему доплачивается постоянная величина C. Как и ранее, возможны три варианта – кривая безразличия полезности агента касается бюджетной кривой, имеющей вид разрывной прямой, на линейном участке с углом наклона α либо правее точки x (точка А – см. рисунок 38), либо левее этой точки (точка В – см. рисунок 39), либо, что не исключено в силу выпуклости кривых безразличия, одновременно в точке x и правее ее (точки А и В – см. рисунок 40).
|
q |
|
|
q |
|
q |
|
|
|
α |
|
|
α В |
|
α |
В |
|
|
A |
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
α |
|
t |
α |
|
t |
α |
t |
0 |
x |
T |
0 |
x |
T |
0 |
x |
T |
|
Рис. 38 |
|
|
Рис. 39 |
|
|
Рис. 40 |
|
|
|
Система стимулирования L+С-типа |
|
|||||
Итак, рассмотрена взаимосвязь между теоретико-игровыми моделями стимулирования и экономическими моделями предло- жения труда. Полученные результаты позволили не только провес- ти содержательные аналогии, но и установить количественные соотношения между параметрами этих двух классов моделей.
Для использования результатов моделирования на практике требуется уметь идентифицировать модель стимулирования, в том числе – определять предпочтения участников ОС. Так как пред-
86
почтения центра описываются его функцией дохода, а предпочте- ния агента – функцией затрат, то необходимо привести конструк- тивные алгоритмы определения этих функций. Рассмотрим сначала проблему идентификации функции затрат агента.
ЧАСТЬ 3. КОЛЛЕКТИВНОЕ СТИМУЛИРОВАНИЕ
7. КОЛЛЕКТИВНОЕ СТИМУЛИРОВАНИЕ ЗА ИНДИВИДУАЛЬНЫЕ РЕЗУЛЬТАТЫ
В предыдущих разделах рассматривались системы индивиду- ального стимулирования. Дальнейшее изложение посвящено опи- санию моделей коллективного стимулирования, то есть стимули- рования коллектива агентов.
Простейшим обобщением базовой одноэлементной модели является многоэлементная ОС с независимыми (невзаимодейст- вующими) агентами. В этом случае задача стимулирования распа- дается на набор одноэлементных задач.
Если ввести общие для всех или ряда агентов ограничения на механизм стимулирования, то получается задача стимулирования в ОС со слабо связанными агентами, представляющая собой набор параметрических одноэлементных задач, для которого проблема
поиска оптимальных значений параметров решается стандартными методами условной оптимизации.
Если агенты взаимосвязаны, то есть затраты или/и стимулиро- вание агента зависят, помимо его собственных действий, от дейст- вий других агентов, то получается «полноценная» многоэлемент- ная модель стимулирования, описываемая ниже.
Последовательность решения многоэлементных и одноэле- ментных задач имеет много общего. Сначала необходимо постро- ить компенсаторную систему стимулирования, реализующую некоторое (произвольное, или допустимое при заданных ограниче- ниях) действие – первый этап – этап анализа согласованности стимулирования. В одноэлементных ОС в рамках гипотезы благо- желательности для этого достаточно проверить, что при этом максимум целевой функции агента будет достигаться, в том числе и на реализуемом действии. В многоэлементных ОС достаточно
87

показать, что выбор соответствующего действия является равно- весной стратегией в игре агентов. Если равновесий несколько, то необходимо проверить выполнение для рассматриваемого дейст- вия дополнительной гипотезы о рациональном выборе агентов. В
большинстве случаев достаточным оказывается введение аксиомы единогласия (агенты не будут выбирать равновесия, доминируе- мые по Парето другими равновесиями), иногда центру приходится
вычислять гарантированный результат по множеству равновесных стратегий агентов и т.д. Далее следует приравнять стимулирование затратам и решить стандартную оптимизационную задачу – какое из реализуемых действий следует реализовывать центру – второй этап – этап согласованного планирования – см. также второй раз- дел.
В большинстве рассматриваемых в теории управления моде- лей стимулирования изучаются одноэлементные ОС, состоящие из одного управляющего органа (центра) и одного управляемого субъекта – агента. В настоящем разделе описывается предложен- ный в [14] метод, заключающийся в выборе системы стимулирова- ния, реализующей оптимальный с точки зрения центра вектор действий агентов как равновесие в доминантных стратегиях1 (РДС) [5], что позволяет декомпозировать игру агентов и получить ана- литическое решение задачи стимулирования.
Стимулирование в ОС со слабо связанными агента-
ми. Описанные выше результаты решения задачи стимулирования могут быть непосредственно обобщены на случай, когда имеются n ³ 2 агентов, функции затрат которых зависят только от их собст- венных действий (так называемые сепарабельные затраты), сти-
мулирование каждого агента зависит только от его собственных действий, но существуют ограничения на суммарное стимулирова-
ние агентов. Такая модель называется ОС со слабо связанными агентами и является промежуточной между системами индивиду- ального и коллективного стимулирования.
1 Напомним, что равновесием в доминантных стратегиях называется такой вектор действий агентов, что каждому агенту выгодно выбирать соответст- вующую компоненту этого равновесия независимо от того, какие действия выбирают другие агенты – см. формальное определение ниже.
88

Пусть I = {1, 2, …, n} – множество агентов, yi Ai – действие i-го агента, ci(yi) – затраты i-го агента, σi(yi) – стимулирование его со стороны центра, i I, y = (y1, y2, …, yn) – вектор действий аген-
тов, y A’ = ∏ Ai . Предположим, что центр получает доход H(y)
iÎI
от деятельности агентов.
Пусть размеры индивидуальных вознаграждений агентов ог-
раничены величинами {Ci}i I, то есть yi Ai σi(yi) ≤ Ci, i I. Если фонд стимулирования (ФЗП) ограничен величиной R, то есть
åСi ≤ R, то получаем (см. второй раздел), что максимальное
iÎI
множество реализуемых действий для i-го агента зависит от соот- ветствующего ограничения механизма стимулирования:
Pi (Ci ) = [0, yi+ (Ci )] , i I.
Тогда оптимальное решение задачи стимулирования в ОС со слабо связанными агентами определяется следующим образом – максимизировать выбором индивидуальных ограничений {Ci}i I,
удовлетворяющих бюджетному ограничению åСi ≤ R, следую-
iÎI
щее выражение:
Φ(R) = Îmax H ( y1, ..., yn ) ,
{ yi Pi (Ci )}i I
что является стандартной задачей условной оптимизации. Отметим, что когда ФЗП фиксирован, затраты центра на сти-
мулирование не вычитаются из его дохода. Если ФЗП является переменной величиной, то его оптимальное значение R* может
быть найдено как решение следующей задачи: |
|
|||
R* = arg max [Φ(R) – R]. |
|
|||
R³0 |
|
|
|
|
Пример 5. Пусть функции затрат агентов: ci(yi) = y |
2 /2ri, i I, |
|||
|
|
|
i |
|
а функция дохода центра – H (y) = åαi yi , где {αi}i I |
– положи- |
|||
iÎI |
|
|
|
|
тельные константы. |
|
|
|
|
При заданных ограничениях {Ci}i I |
максимальное реализуе- |
|||
мое действие каждого агента: y+ (C ) = |
|
2rC |
, i I. Задача све- |
|
i i |
|
i i |
|
|
89

лась к определению оптимального набора ограничений {Ci }i I,
удовлетворяющего бюджетному ограничению и максимизирующе- го целевую функцию центра:
ìåαi |
|
|
® max |
|
||||
2riCi |
|
|||||||
ï |
i I |
|
|
|
|
{Ci } |
. |
|
ïíåCi £ R |
|
|
|
|||||
îi I |
|
|
|
|
|
|||
Решение этой задачи имеет вид: |
|
|
||||||
C |
= |
rα2 |
R , i I . |
|||||
|
i i |
|||||||
årjα2j |
||||||||
|
i |
|
|
|
|
|||
|
|
|
j I |
|
|
|
||
Оптимальный размер ФЗП равен R* = åriαi2 / 2. ∙ |
||||||||
|
|
|
|
|
|
i I |
||
Стимулирование в |
ОС с |
сильно связанными агента- |
||||||
ми. Обозначим y-i = (y1, y2, …, yi-1, |
|
yi+1, …, yn) A-i = ∏ Aj – |
||||||
|
|
|
|
|
|
|
j¹i |
|
обстановка игры для i-го агента. Интересы и предпочтения участ- ников ОС – центра и агентов – выражены их целевыми функциями. Целевая функция центра Φ(σ, y) представляет собой разность между его доходом H(y) и суммарным вознаграждением υ(y),
n
выплачиваемым агентам: υ(y) = åσi (y) , где σi(y) – стимулирова-
i=1
ние i-го агента, σ(y) = (σ1(y), σ2(y), …, σn(y)). Целевая функция i-го агента fi(σi, y) представляет собой разность между стимулировани- ем, получаемым от центра, и затратами ci(y), то есть:
n
(1)Φ(σ, y) = H(y) – åσ i ( y) .
i=1
(2)fi(σi, y) = σi(y) – ci(y), i I.
Отметим, что и индивидуальное вознаграждение, и индивиду- альные затраты i-го агента по выбору действия yi в общем случае зависят от действий всех агентов (случай сильно связанных агентов
с несепарабельными затратами).
Примем следующий порядок функционирования ОС. Центру и
агентам на момент принятия решения о выбираемых стратегиях
90