

МІНІСТЕРСТВО АГРАРНОЇ ПОЛІТИКИ ТА ПРОДОВОЛЬСТВА УКРАЇНИ
ТАВРІЙСЬКИЙ ДЕРЖАВНИЙ АГРОТЕХНОЛОГІЧНИЙ УНІВЕРСИТЕТ
ФАКУЛЬТЕТ інженерії та комп’ютерних технологій
Кафедра «Технічна механіка»
Розрахунок привода
для студентів ОКР «Бакалавр»
з напряму 6.100101 «Енергетика та електротехнічні системи в агропромисловому комплексі»
денної форми навчання
Мелітополь, 2012
У
Розрахунок привода. Методичні вказівки до виконання розрахунково – графічної роботи для студентів з напряму підготовки 6.100101 “Енергетика та електротехнічні системи в агропромисловому комплексі” ОКР “Бакалавр” – Таврійський державний агротехнологічний університет, 2012. - 36 с.
Розробник: ст. викл. Антонова Г.В.
Рецензент/и: к.т.н. доцент, зав. каф. «Технічна механіка» Вершков О.О.,
к. т. н. доцент каф. ОПХВ Буденко С.Ф.
Розглянуто та рекомендовано до друку на засіданні кафедри «Технічна механіка»
Протокол № ____ від «____» __________201__ р.
Затверджено методичною комісією енергетичного факультету
Протокол № ___ від «____» ____ 201__ р.
З
ВСТУП 4
1 КІНЕМАТИЧНИЙ ТА СИЛОВИЙ РОЗРАХУНОК ПРИВОДА 5
2 РОЗРАХУНОК ЦИЛІНДРИЧНОЇ ПРЯМОЗУБОЇ ЗУБЧАСТОЇ 7
ПЕРЕДАЧІ 7
3 РОЗРАХУНОК КЛИНОПАСОВОЇ ПЕРЕДАЧІ 14
4 РОЗРАХУНОК ВАЛІВ 21
ЛІТЕРАТУРА 23
Приклад виконання 25
розрахунково-графічної роботи 25
з прикладної механіки 25
ВСТУП
Ведуча роль машинобудування серед інших галузей хазяйства розвиненої індустріальної країни визначається тим, що основні виробничі процеси в усіх галузях промисловості, будівництва і сільського господарства виконують машини. Технічний рівень усіх галузей народного хазяйства в значній мірі визначається рівнем розвитку вітчизняного машинобудування.
При виконанні розрахунково-графічної роботи з дисципліни «Прикладна механіка» студент здобуває навички розрахунку основних складових механічного привода у складі електродвигуна, пасової передачі, циліндричної прямозубої зубчастої передачі, а також валів редуктора.
За результатами розрахунків циліндричної прямозубої зубчастої передачі та валів редуктора викреслюється компоновка циліндричного одноступінчастого редуктора, яка і складає графічну частину роботи.
Методичні вказівки можуть бути використані студентами інших спеціальностей, а також при виконанні курсових проектів по іншим дисциплінам та дипломного проекту.
1 Кінематичний та силовий розрахунок привода
Задача розрахунку: визначити загальний ККД привода, вибрати електродвигун, вичислити загальне передаточне число привода і провести розподіл його по ступеням; розрахувати основні швидкісні та силові параметри на валах привода.
Вихідні дані:
- потужність на веденому валу Р, кВт;
- кутова швидкість веденого вала , рад/с;
- синхронна частота обертання електродвигуна nec, об/хв.
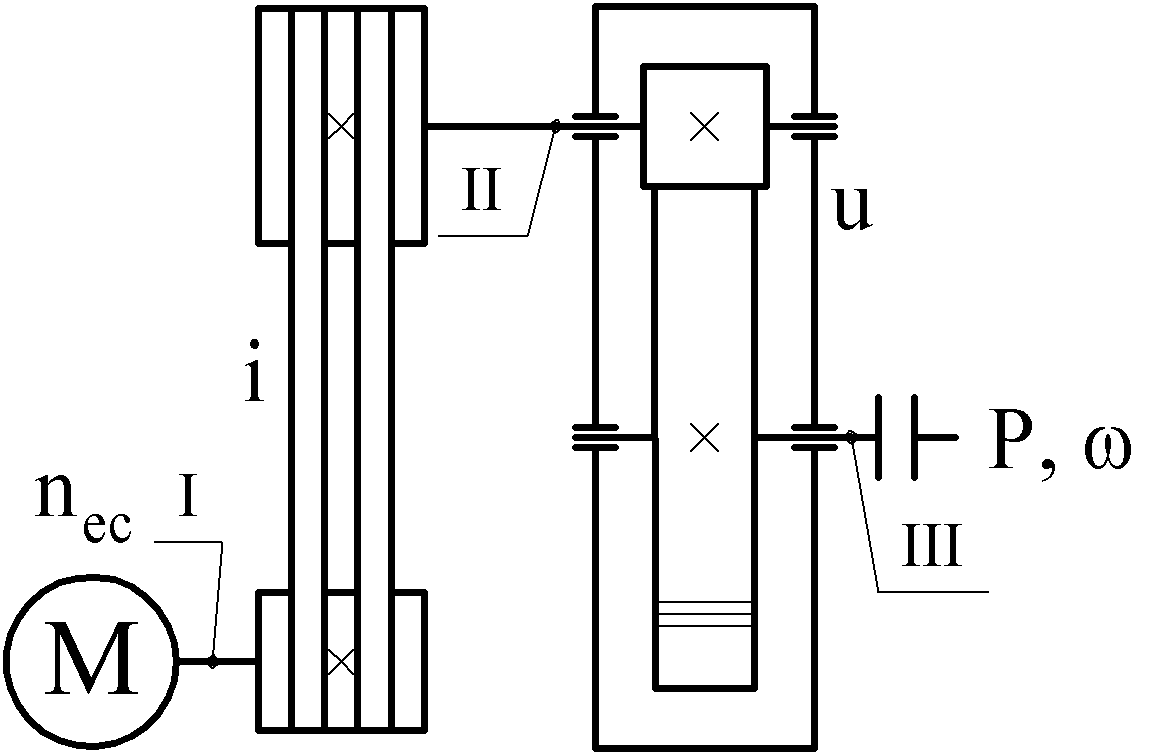
Рисунок 1 – Кінематична схема привода
1.1 Загальний коефіцієнт корисної дії привода
![]()
де п – коефіцієнт корисної дії пасової передачі, п = 0,94…0,96;
з – коефіцієнт корисної дії циліндричної зубчастої передачі, з = 0,96…0,98;
пп – коефіцієнт корисної дії пари підшипників, пп = 0,990…0,995;
м – коефіцієнт корисної дії з’єднувальної муфти, м = 0,98…0,99.
1.2 Потужність, яка потрібна на привод транспортера
![]() .
.
1.3 Вибір електродвигуна
При виконанні розрахунково-графічної роботи рекомендується вибирати трьохфазні асинхронні двигуни серії 4А, які характеризуються простотою конст-рукції, невеликою вартістю та високою експлуатаційною надійністю (таблиця 1).
Вибирається найближче менше за Ред.п значення потужності електродвигуна Ред з номінальною частотою обертання nен.
Завантаження електродвигуна
![]() .
.
Електродвигуни даного типу допускають завантаження до 112 %. Якщо ж З > 112 %, то потрібно вибрати двигун більшої потужності.
Таблиця 1 – Потужність та частота обертання електродвигунів закритих з обдувом серії 4А (марка / номінальна частота обертання nен, об/хв)
Потужність Pед, кВт |
Синхронна частота обертання nec, об/хв |
|||
3000 |
1500 |
1000 |
750 |
|
0,75 |
4A71A2/2840 |
4A71B4/1390 |
4A80A6/915 |
4A90LA8/700 |
1,1 |
4A71B2/2810 |
4A80A4/1420 |
4A80B6/920 |
4A90LB8/700 |
1,5 |
4A80A2/2850 |
4A80B4/1415 |
4A90L6/935 |
4A100L8/700 |
2,2 |
4A80B2/2850 |
4A90L4/1425 |
4A100L6/950 |
4A112MA8/700 |
3,0 |
4A90L2/2840 |
4A100S4/1435 |
4A112MA6/955 |
4A112MB8/700 |
4,0 |
4A100S2/2880 |
4A100L4/1430 |
4A112MB6/950 |
4A132S8/720 |
5,5 |
4A100L2/2880 |
4A112M4/1445 |
4A132S6/965 |
4A132M8/720 |
7,5 |
4A112M2/2900 |
4A132S4/1455 |
4A132M6/970 |
4A160S8/720 |
1.4 Загальне передаточне число привода
![]() ,
,
де n – частота обертання веденого вала, об/хв,
![]() .
.
1.5 Розподіл загального передаточного числа по ступеням привода
Загальне передаточне число привода є добутком від перемноження передаточних чисел передач, які входять до його складу.
![]() ,
,
де і – передаточне відношення пасової передачі;
u – передаточне число одноступінчастого циліндричного редуктора.
1.5.1 Попереднє передаточне відношення пасової передачі
Бажано приймати попереднє передаточне відношення пасової передачі і = 2…3 (значення і < 2 недоцільні, а і > 3 може привести до збільшення розмірів пасової передачі), але так, щоб передаточне число одноступінчастого циліндричного редуктора входило в рекомендований діапазон u = 2,0…6,3 і не перевищувало граничне значення uгр = 8,0.
1.5.2 Попереднє передаточне число редуктора
![]() .
.
По
таблиці 2 слід прийняти ближче до
![]() стандартне
значення u.
стандартне
значення u.
Таблиця 2 – Стандартні передаточні числа зубчастих передач
1-й ряд |
2,00 |
– |
2,50 |
– |
3,15 |
– |
4,00 |
– |
5,00 |
– |
6,30 |
– |
8,00 |
2-й ряд |
– |
2,24 |
– |
2,80 |
– |
3,55 |
– |
4,50 |
– |
5,60 |
– |
7,10 |
– |
1.5.3 Передаточне відношення пасової передачі
![]() .
.
1.6 Частота обертання та кутова швидкість валів привода
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Перевірка: nIII = n, ІІІ = .
1.7 Потужність на валах привода
![]() ;
;
![]() ;
;
![]() .
.
Перевірка: РІ = Ред.п.
1.8 Обертаючі моменти на валах привода
![]() ;
;
![]() ;
;
![]() .
.
Результати розрахунків слід представити у вигляді таблиці 3.
Таблиця 3 – Кінематичні та силові параметри привода
Вал |
Потужність Р, кВт |
Кутова швидкість , рад/с |
Частота обертання n, об/хв |
Обертаючий момент Т, Нм |
I |
РІ |
І |
nІ |
ТІ |
II |
РІІ |
ІІ |
nІІ |
ТІІ |
III |
РІІІ |
ІІІ |
nІІІ |
ТІІІ |
Висновок: визначені основні силові та кінематичні параметри привода.