

1.2.2. Система збіжних сил. Умови рівноваги
Систему сил називають збіжною, якщо лінії дії сил перетинаються в одній точці (рис. 1.14).
Згідно з аксіомою про паралелограм сил рівнодійна цієї системи сил дорівнює геометричній сумі складових сил
![]() .
(1.18)
.
(1.18)
Щоб дати аналітичне визначення ковзного вектора рівнодійної, треба знайти її момент відносно довільної точки :
![]() .
(1.19)
.
(1.19)
Згідно з (1.19)
момент рівнодійної відносно довільного центра дорівнює геометричній (векторній) сумі моментів складових сил відносно того самого центра.
Наведене твердження є змістом теореми Варіньйона щодо збіжної системи сил.
Умовою рівноваги збіжної системи сил є рівність нулеві їх рівнодійної:

Рисунок 1.14
![]() .
(1.20)
.
(1.20)
Умова рівноваги (1.20) є як необхідною, так і достатньою, бо з неї випливає рівність нулеві обох компонент ковзного вектора (1.13).
Умову (1.20) називають ще механічною, або фізичною, умовою рівноваги збіжної системи сил.
Очевидно, що багатокутник сил за (1.20) замкнений. У цьому полягає геометрична (графічна) умова рівноваги.
На підставі (1.18) проекції рівнодійної сили на осі прямокутної декартової системи координат дорівнюють алгебраїчним сумам проекцій складових сил на осі координат
![]() ;
; ![]() ;
;
![]() .
(1.21)
.
(1.21)
Отже, згідно з механічною умовою рівноваги (1.20) на підставі (1.21) дістаємо аналітичні умови рівноваги збіжної системи сил:
![]() ;
; ![]() ;
; ![]() .
(1.22)
.
(1.22)
Рівності (1.22) називають аналітичними рівняннями рівноваги.
У разі потреби з них можна знайти не більш як три алгебраїчних невідомих.
Якщо кількість невідомих перевищує кількість рівнянь рівноваги, задачу називають статично невизначеною.
Розглянемо приклад застосування рівнянь рівноваги, на якому проілюструємо методику розв’язування задач статики.
Приклад
1.2.
Три невагомих стержні
,
і
закріплені шарнірно в точці
і за допомогою шарнірів
,
,
прикріплені до горизонтальної підставки
(рис. 1.15). Площини трикутників
і
![]() вертикальні і взаємно перпен-дикулярні.
На вузол
паралельно
вертикальні і взаємно перпен-дикулярні.
На вузол
паралельно
![]() діє сила
діє сила
![]() кН. Знайти зусилля в стержнях, якщо
кН. Знайти зусилля в стержнях, якщо
![]() ;
;
![]() .
.
Розв’язання. 1. Виділимо тіло або точку, умови рівноваги якої дадуть можливість розв’язати задачу. Це – точка , до якої збігаються всі стержні, зусилля в яких треба визначити. Отже, розглянемо рівновагу вузла , користуючись аксіомою про звільнення від в’язей.
2.
Аналізуємо сили, які прикладені до вузла
А.
На вузол А
діє активна сила
,
а також три реакції стержнів, які діють
вздовж них, оскільки стержні ідеальні.
Припустимо, що всі стержні розтягнуті,
тому на рис. 1.15 їхні реакції напрямлені
від вузла А.
В задачі три невідомі
![]() ,
для відшукання яких можна скласти три
рівняння рівноваги. Таким чином, задача
статично визначена.
,
для відшукання яких можна скласти три
рівняння рівноваги. Таким чином, задача
статично визначена.
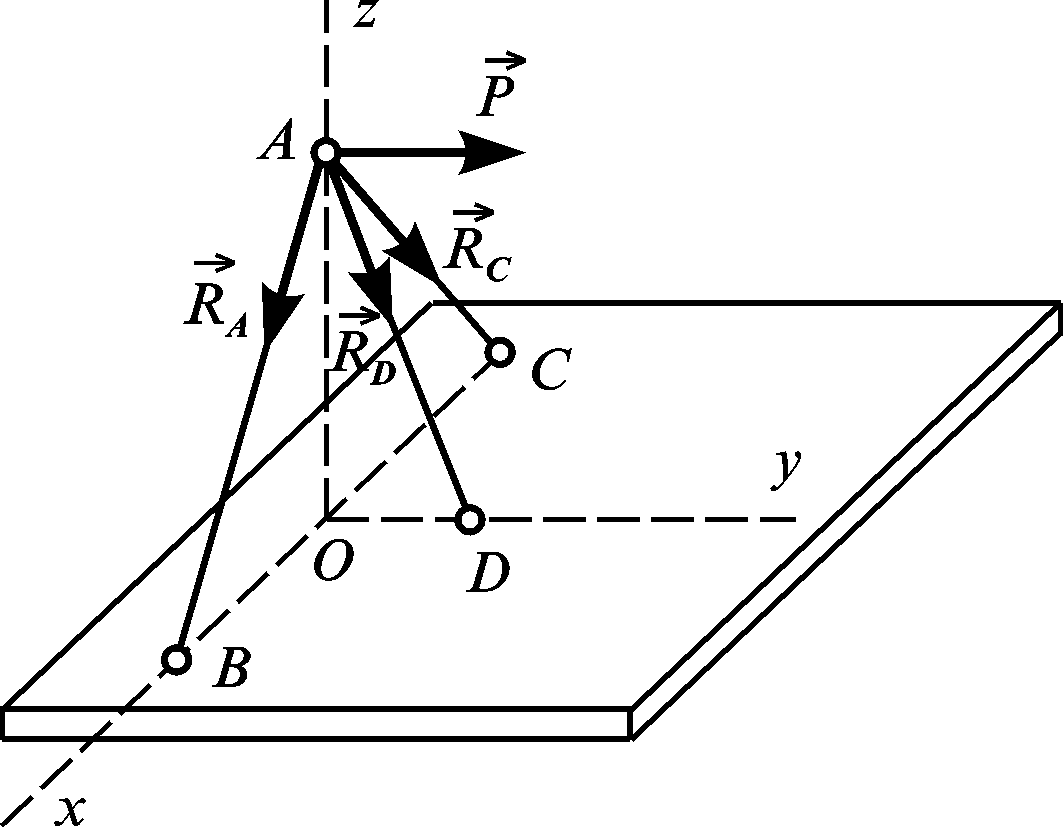
Рисунок 1.15
Початок системи координат виберемо в точці О, додатні напрями осей позначено на рис. 1.15.
3. Складаємо рівняння рівноваги:
![]()
![]()
![]()
На
підставі першого рівняння робимо
висновок, що
![]() ,
з другого рівняння знаходимо
,
з другого рівняння знаходимо
![]() :
:
![]() .
.
Від’ємний знак свідчить, що цей стержень стиснутий, оскільки спочатку припускали, що він розтягнутий. Нарешті, з третього рівняння знайдемо
![]()
Додатний знак цих реакцій вказує, що стержні АВ і АС розтягнуті.