4.3.4. Вільні коливання системи з одним степенем вільності. Інтерпретація руху на фазовій площині
Рівняння вільних коливань системи з одним степенем вільності і його розв’язок нічим не відрізняється від випадку, розглянутого в § 3.1.2. Тому коротко нагадаємо, що диференціальне рівняння цього руху і його розв’язок мають вигляд
![]() ;
(4.121)
;
(4.121)
![]() .
(4.122)
.
(4.122)
Розглянемо інтерпретацію руху на фазовій площині.
Сукупність
величин, що повністю характеризують
стан системи в довільний момент часу,
називають
фазою
системи.
Для механічної системи з
степенями вільності це узагальнені
координати
![]() й узагальнені швидкості;
й узагальнені швидкості;
![]() ;
всього 2
параметрів.
;
всього 2
параметрів.
|
Для
системи з одним степенем вільності
це два параметри ( |
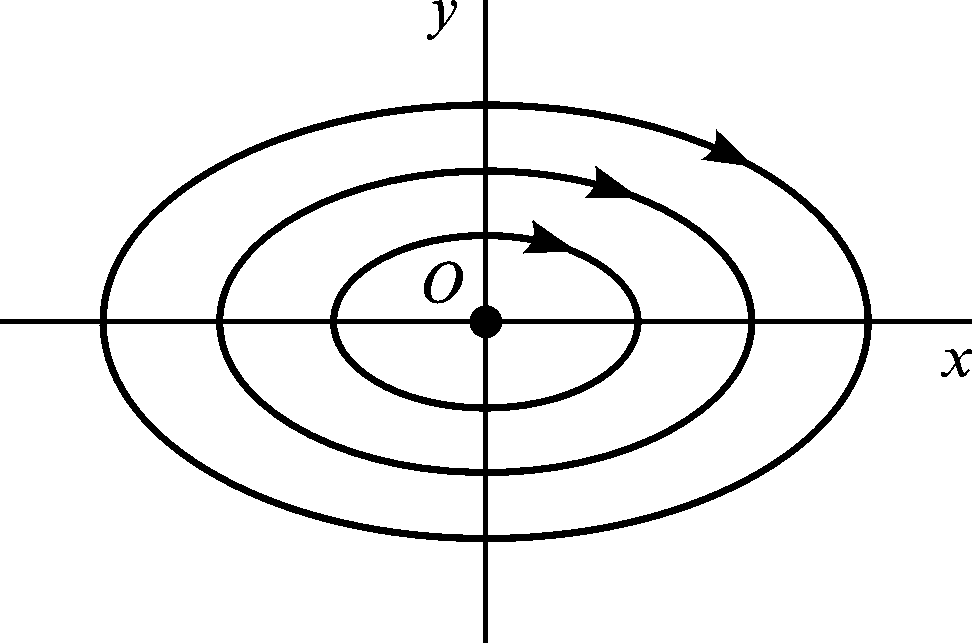
Рисунок 4.19 |
Рух системи, зміна її фази і змушують зображуючу точку рухатися по фазовій площині і креслити криву, яку називають фазовою траєкторією.
Сукупність фазових траєкторій, здобутих для різних початкових умов, називають фазовою діаграмою, або фазовим портретом.
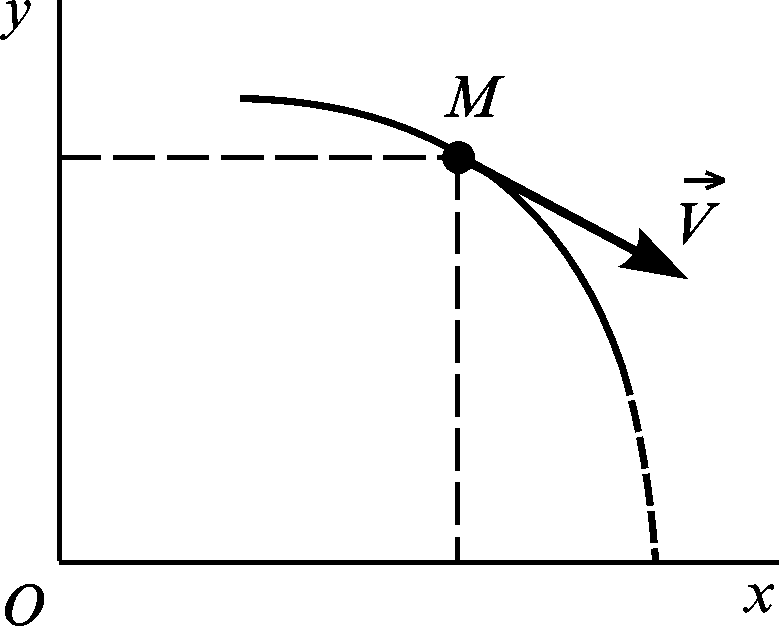
Рух зображуючої точки по фазовій траєкторії відбувається з фазовою швидкістю
![]() ,
(4.123)
,
(4.123)
що
має певні властивості для всіх фазових
траєкторій незалежно від умов задачі.
У верхній півплощині фазової площини
![]() .
Отже, зображуюча точка у верхній
півплощині фазової площини рухається
зліва направо. Відповідно в нижній
півплощині точка рухається справа
наліво і перетинає вісь
під прямим кутом (у точці перетину
.
Отже, зображуюча точка у верхній
півплощині фазової площини рухається
зліва направо. Відповідно в нижній
півплощині точка рухається справа
наліво і перетинає вісь
під прямим кутом (у точці перетину
![]() ).
).
Знайдемо диференціальне рівняння фазових траєкторій у загальному випадку. Розглянемо автономну систему, тобто систему, на яку діє збурювальна сила, незалежна від часу. Рівняння руху такої системи може бути написане у вигляді
![]() .
(4.124)
.
(4.124)
У фазових координатах і отримаємо систему рівнянь
 (4.125)
(4.125)
У загальному вигляді система (4.125) запишеться так:
 (4.126)
(4.126)
де
![]() і
і
![]() – деякі обмежені аналітичні функції.
– деякі обмежені аналітичні функції.
Поділимо перше рівняння (4.126) на друге:
![]() .
(4.127)
.
(4.127)
Рівняння (4.127) називають диференціальним рівнянням фазових траєкторій. Інтегральні криві цього рівняння визначають фазові траєкторії.
Точку
на фазовій площині з координатами
![]() ,
для якої
,
для якої
![]() і
і
![]() дорівнюють нулеві, називають особливою
точкою.
Ця точка відповідає положенню рівноваги
системи.
дорівнюють нулеві, називають особливою
точкою.
Ця точка відповідає положенню рівноваги
системи.
Побудуємо фазовий портрет вільних коливань системи з одним степенем вільності.
Рівняння (4.121) запишемо у вигляді
![]() (4.128)
(4.128)
і
перейдемо до фазових координат:
![]() ;
;
![]() ,
,
де
![]() .
.
Рівняння фазових траєкторій має вигляд
![]() (4.129)
(4.129)
Інтегруючи рівняння (4.129), знаходимо
![]() .
(4.130)
.
(4.130)
Позначимо
цю сталу
![]() .
Вираз (4.130) прийме вигляд
.
Вираз (4.130) прийме вигляд
![]() .
(4.131)
.
(4.131)
В
Рисунок 4.20