

2.4.4. Додавання поступального і обертального рухів тіла
Розглянемо два випадки такого виду складного руху тіла.
Випадок 1. Швидкість поступального руху і кутова швидкість обертання тіла ортогональні.
П
Рисунок 2.53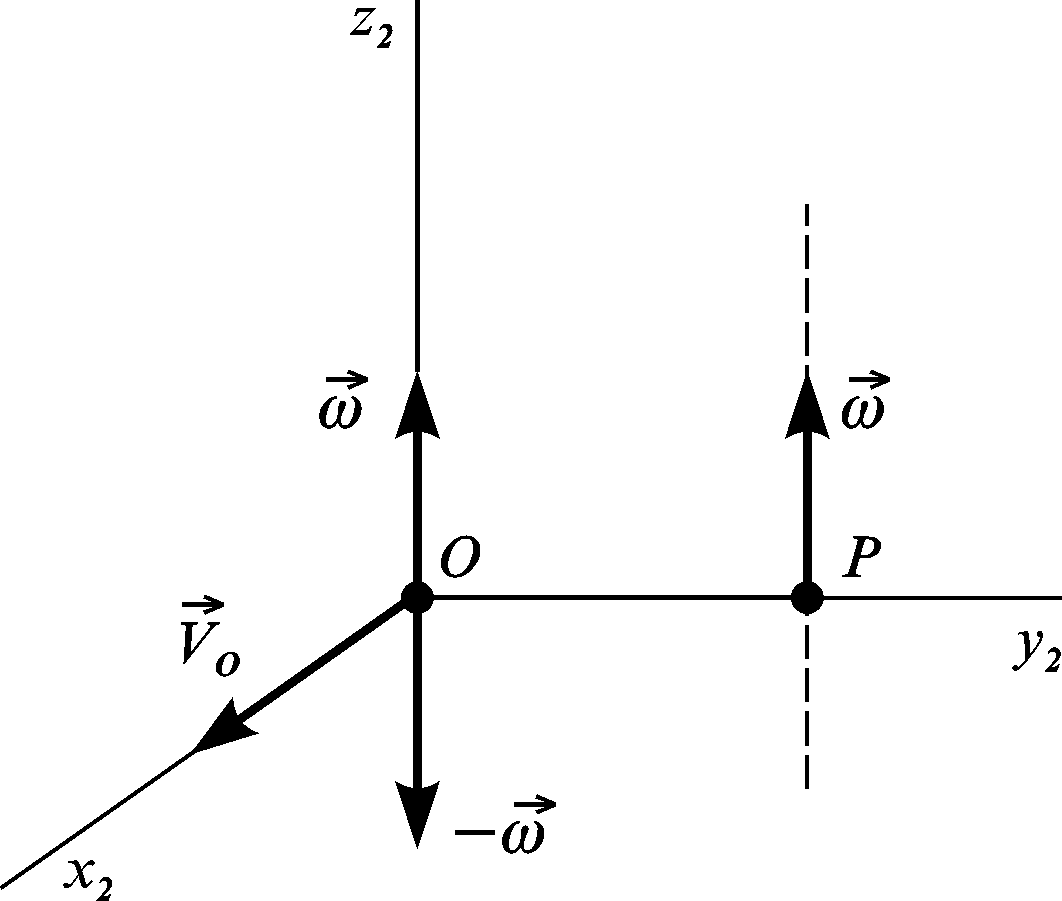
![]() системи координат
системи координат
![]() і разом з цією системою рухається
поступально зі швидкістю
і разом з цією системою рухається
поступально зі швидкістю
![]() (переносний рух), при цьому
(переносний рух), при цьому
![]() (рис. 2.53). Довільна точка
на осі обертання має швидкість
.
Поступальний рух еквівалентний парі
обертань з моментом пари, що дорівнює
швидкості поступального руху. Замінимо
швидкість
парою кутових швидкостей (
(рис. 2.53). Довільна точка
на осі обертання має швидкість
.
Поступальний рух еквівалентний парі
обертань з моментом пари, що дорівнює
швидкості поступального руху. Замінимо
швидкість
парою кутових швидкостей (![]() ),
яка розташована в площині, перпендикулярній
до вектора
.
Плече цієї пари дорівнює
),
яка розташована в площині, перпендикулярній
до вектора
.
Плече цієї пари дорівнює
![]() .
.
У точці
вектори
і
![]() “зрівноважуються”, так як
“зрівноважуються”, так як
![]() .
Через точку
проходить миттєва вісь обертання,
паралельна до осі
.
На цій осі лежить вектор
.
.
Через точку
проходить миттєва вісь обертання,
паралельна до осі
.
На цій осі лежить вектор
.
Отже,
при додаванні поступального і обертального рухів твердого тіла у випадку ортогональності швидкості поступального і кутової швидкості обертального рухів результуючим рухом тіла є миттєве обертання навколо осі, паралельної до даної, з тією ж кутовою швидкістю. Миттєва вісь обертання знаходиться від даної осі на відстані
![]() .
.
Випадок 2. Швидкість поступального руху і кутова швидкість обертання тіла створюють довільний кут.
Нехай тіло обертається з кутовою швидкістю (відносний рух) навколо осі системи координат і разом з нею рухається поступально (переносний рух) зі швидкістю , при цьому вектори і утворюють кут (рис. 2.54).
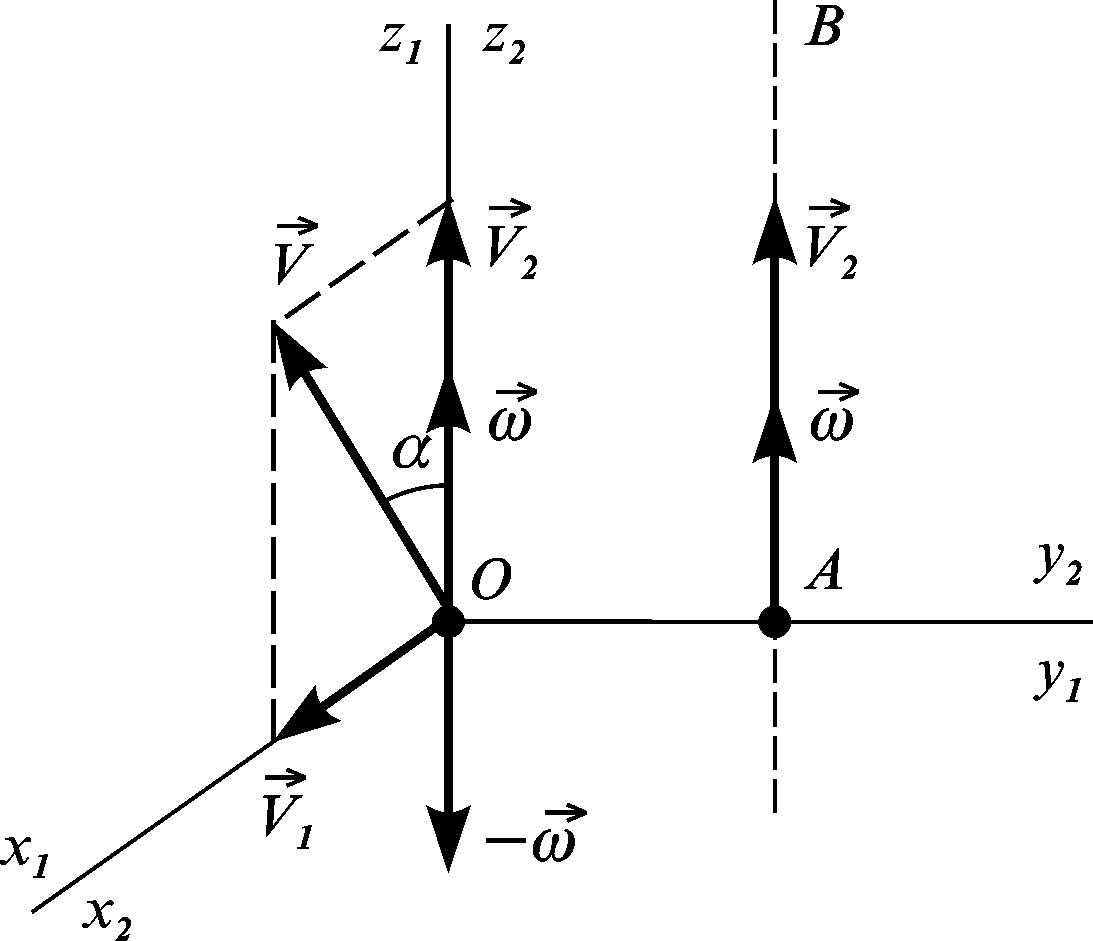
Рисунок 2.54
Нерухому
систему координат
![]() обираємо так, щоб вектори
і
були розташовані в одній площині, нехай
в площині
обираємо так, щоб вектори
і
були розташовані в одній площині, нехай
в площині
![]() .
На рис. 2.54 обидві системи координат
збігаються.
.
На рис. 2.54 обидві системи координат
збігаються.
Поступальний
рух зі швидкістю
розглянемо як синтез двох поступальних
рухів. Розкладемо вектор
на два доданки в площині
![]() :
:
![]() .
.
Вектор
швидкості
розглянемо як момент пари обертань
![]() .
В результаті маємо в точці
зрівноважену систему векторів
.
В результаті маємо в точці
зрівноважену систему векторів
![]() і швидкість
поступального руху.
і швидкість
поступального руху.
В точці
на відстані
,
що дорівнює плечу пари обертань (![]() ),
знаходиться миттєва вісь обертання
.
Вектор швидкості
(вільний вектор) переносимо в точку
(
),
знаходиться миттєва вісь обертання
.
Вектор швидкості
(вільний вектор) переносимо в точку
(![]() ).
).
Таким чином,
результуючим
рухом є сукупність обертального руху
навколо осі
![]() ,
паралельної даній, з тією ж кутовою
швидкістю і поступального руху вздовж
цієї ж осі, тобто має місце гвинтовий
рух. Цей рух називають також
кінематичним гвинтом.
,
паралельної даній, з тією ж кутовою
швидкістю і поступального руху вздовж
цієї ж осі, тобто має місце гвинтовий
рух. Цей рух називають також
кінематичним гвинтом.
Якщо швидкість і кутова швидкість змінні, то рух тіла буде миттєво-гвинтовим рухом.
2.4.5. Метод “зупинки” (метод Вілліса)
Розглянемо прості передачі із зовнішнім (рис. 2.55) і внутрішнім (рис. 2.56) зачепленням коліс. Осі обертання коліс в обох випадках нерухомі. На підставі рівності швидкостей точок дотику коліс маємо:
![]() (2.122)
(2.122)
у випадку зовнішнього зачеплення (рис. 2.55) і
![]() (2.123)
(2.123)
у випадку зачеплення внутрішнього (рис. 2.56).
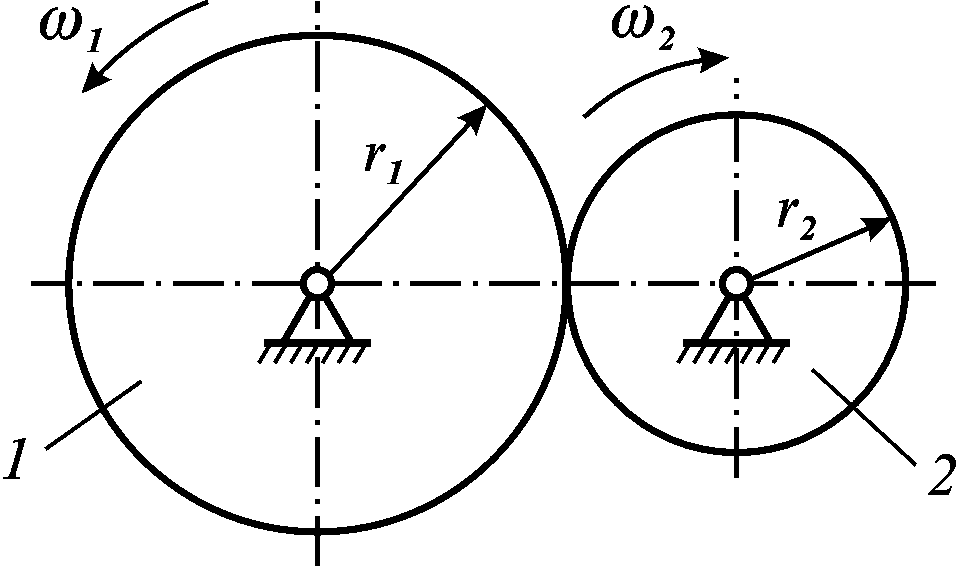
Рисунок 2.55
Знаки (+) і (-) у формулах (2.122) і (2.123) відповідають співнапрямленим і протилежно напрямленим кутовим швидкостям.
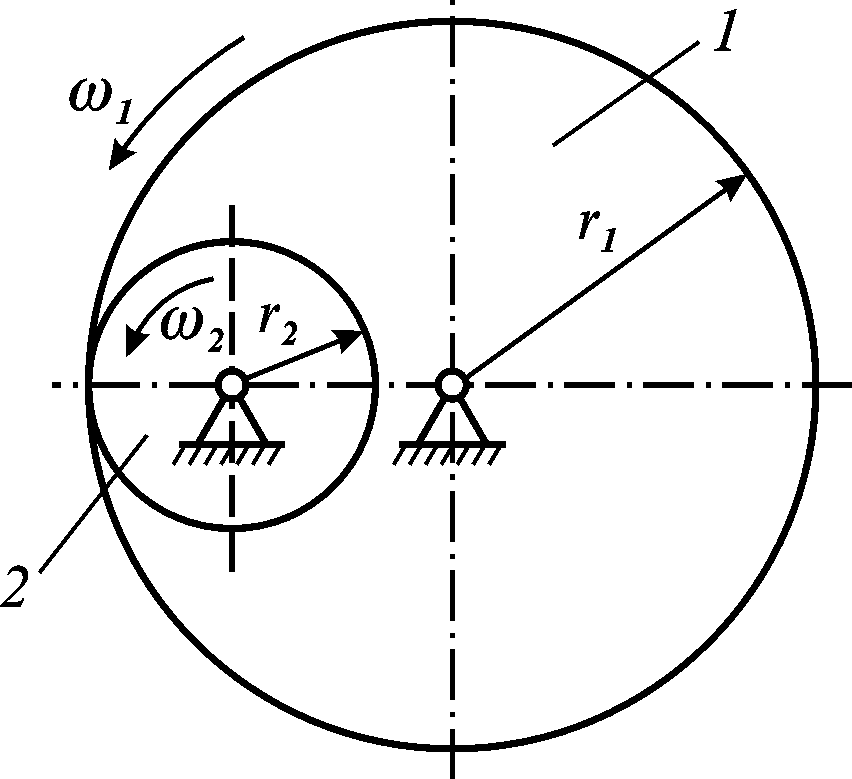
Рисунок 2.56
Розглянемо тепер епіциклічні або планетарні передачі теж з внутрішнім (рис. 2.57) і зовнішнім (рис. 2.58) зачепленням коліс.
Ці
передачі складаються з нерухомого
колеса, кривошипа
![]() (водила)
і рухомого колеса (сателіта),
яке є тілом, що виконує
складний рух: обертається навколо двох
паралельних осей: нерухомої О і рухомої
А.
(водила)
і рухомого колеса (сателіта),
яке є тілом, що виконує
складний рух: обертається навколо двох
паралельних осей: нерухомої О і рухомої
А.
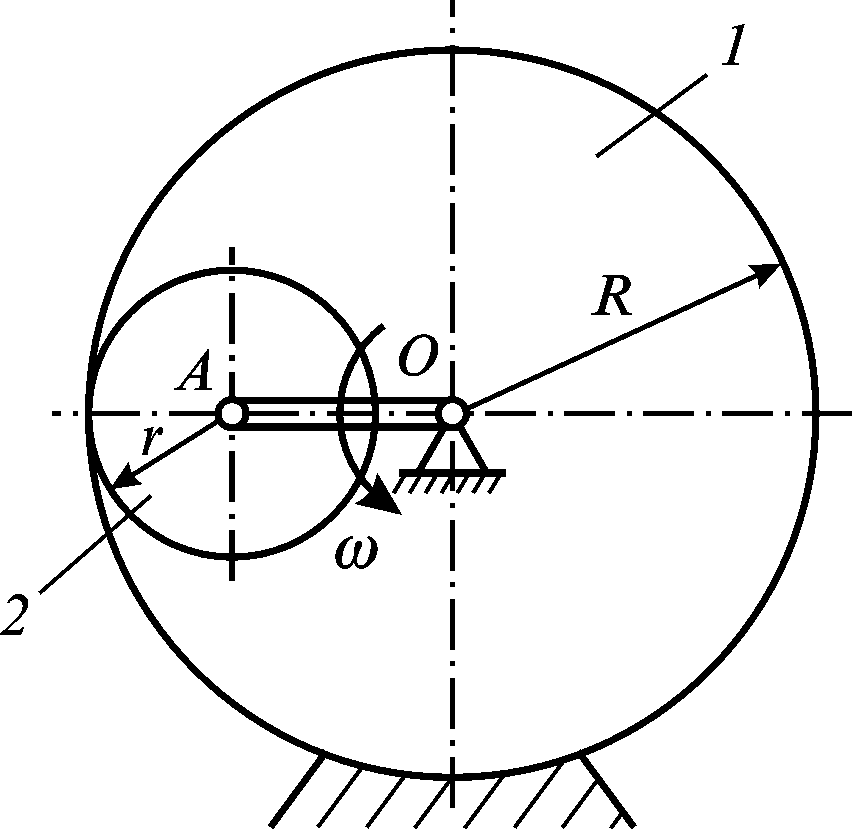
Рисунок 2.57
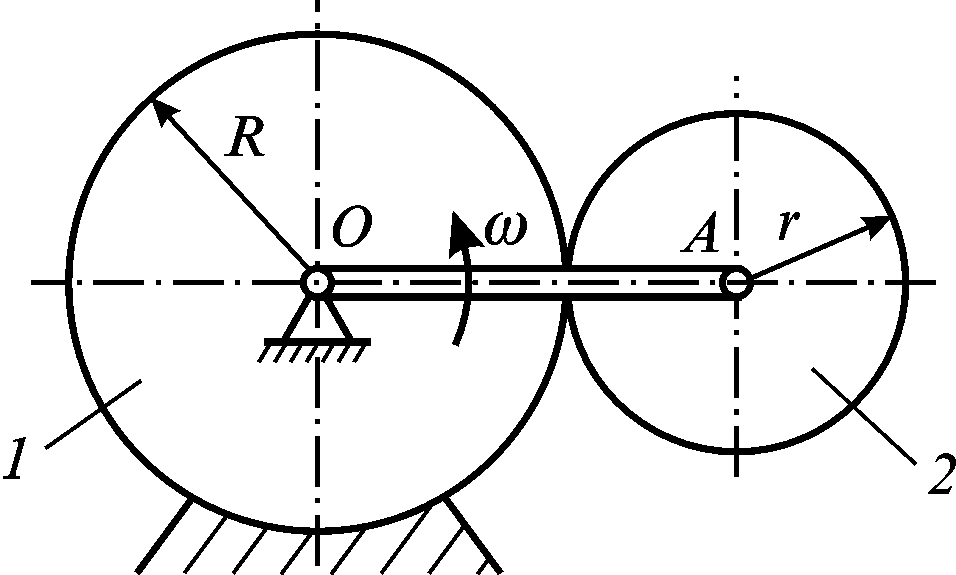
Рисунок 2.58
Щоб
дослідження епіциклічних передач звести
до дослідження простих, подумки зупинимо
водило (кривошип), тобто надамо всім
ланкам механізму загального переносного
обертального руху навколо осі
з кутовою швидкістю
![]() .
Тоді передача перетвориться на просту,
осі
і
стануть нерухомими, а кутові швидкості
коліс 1 і 2 будуть рівні відповідно
і
.
Тоді передача перетвориться на просту,
осі
і
стануть нерухомими, а кутові швидкості
коліс 1 і 2 будуть рівні відповідно
і
![]() .
.
На підставі (2.122) і (2.123) отримаємо для зовнішнього зачеплення (рис. 2.58)
![]() ,
,
для внутрішнього зачеплення (рис. 2.57)
![]() .
.
Невідому
кутову швидкість
![]() знаходимо з цих виразів.
знаходимо з цих виразів.
Для розв’язування задач зручно, користуючись методом “зупинки”, складати таблицю кутових швидкостей ланок механізму до і після зупинки. Далі розглянемо цей метод на конкретних прикладах.
Приклади
Приклад
2.9. На рис. 2.59 зображено механізм
точильного станка, який використовують
для отримання великих кутових швидкостей
при малих обертах водила 4, що обертається
навколо нерухомої осі
з кутовою швидкістю
![]() 2
рад/с. Колесо 2, яке вільно насаджено на
кінець
водила, котиться без ковзання по нерухомій
обоймі 3 і передає обертання колесу 1,
вільно насадженому на вісь
.
Знайти кутову швидкість колеса 1, якщо
радіуси коліс 1, 2 відповідно дорівнюють
2
рад/с. Колесо 2, яке вільно насаджено на
кінець
водила, котиться без ковзання по нерухомій
обоймі 3 і передає обертання колесу 1,
вільно насадженому на вісь
.
Знайти кутову швидкість колеса 1, якщо
радіуси коліс 1, 2 відповідно дорівнюють
![]() см,
см,
![]() см.
см.
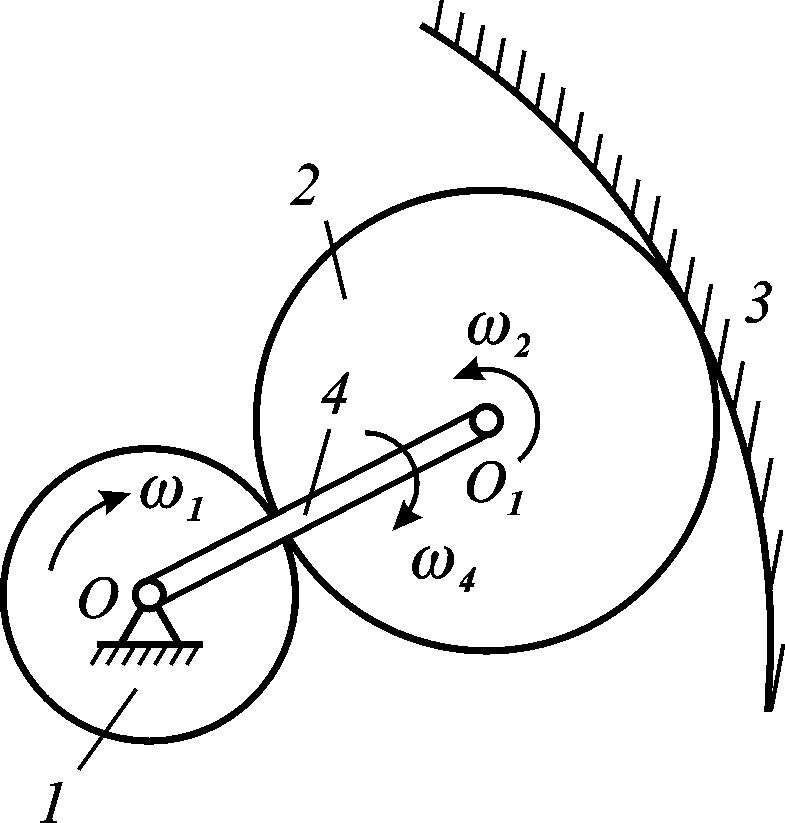
Рисунок 2.59
Розв’язання
Надамо
всім ланкам механізму кутової швидкості
![]() ,
тобто “зупинимо” водило.
,
тобто “зупинимо” водило.
Складемо таблицю кутових швидкостей ланок механізму до і після “зупинки”
|
1 |
2 |
3 |
4 |
До зупинки |
|
|
0 |
|
Після зупинки |
|
|
|
0 |
Колесо 2 і обойма 3 мають внутрішнє зачеплення, тому
![]()
де
![]() .
.
Колеса 1 і 2 знаходяться у зовнішньому зачепленні, отже,
![]() .
.
Розв’язуючи сумісно рівняння, знаходимо
![]() ;
; ![]() рад/с.
рад/с.
Отже, колесо 1 отримало кутову швидкість в 10 разів більшу за кутову швидкість водила. Напрям цього обертання збігається з напрямом обертання водила.
Приклад 2.10. У зображеному на рис. 2.60 планетарному механізмі радіуси нерухомого зубчатого колеса 1 і рухомого колеса 3 однакові, радіус колеса 2 довільний. Довести, що колесо 3 здійснює поступальний рух.

Рисунок 2.60
Розв’язання
Розв’яжемо цю задачу двома способами.
Спосіб 1. Скористаємося теорією плоскопаралельного руху твердого тіла.
Колеса 2 і 3 виконують плоскопаралельний рух. Побудуємо їх миттєві центри швидкостей і знайдемо кутові швидкості.
Колесо 2 має миттєвий центр швидкостей в точці дотику з нерухомим колесом 1. Швидкість точки , як такої, що належить кривошипу ОВ,
![]()
і як такої, що належить колесу 2,
![]() .
.
Порівнюючи ці два вирази, отримаємо:
![]() .
.
Щоб
знайти
![]() побудуємо миттєвий центр швидкостей
колеса 3. Для цього треба знайти швидкості
двох його точок:
побудуємо миттєвий центр швидкостей
колеса 3. Для цього треба знайти швидкості
двох його точок:
![]() ;
;
![]() .
.
Оскільки
швидкості точок
і
обчислені в довільний момент часу, і
вони рівні, то колесо 3 виконує поступальний
рух, і
![]() .
.
Спосіб 2. Скористаємося методом “зупинки”.
Надамо всій системі переносного обертального руху з кутовою швидкістю (- ), тобто “зупинимо” кривошип . Занесемо до таблиці значення кутових швидкостей до і після зупинки і, беручи до уваги, що всі колеса знаходяться у зовнішньому зачепленні, запишемо співвідношення між кутовими швидкостями:
|
|
1 |
2 |
3 |
До зупинки |
|
0 |
|
|
Після зупинки |
0 |
|
|
|
![]() ; 2-3:
; 2-3:
![]() .
.
Перемноживши рівності, маємо
![]() .
.
З отриманого результату можна зробити висновок: колесо 3 виконує поступальний рух, отже має місце пара обертань. Осі обертання паралельні і проходять через точки і . Кутові швидкості обертання рівні за модулем і протилежні за напрямом.