

В’язь – шорстка поверхня
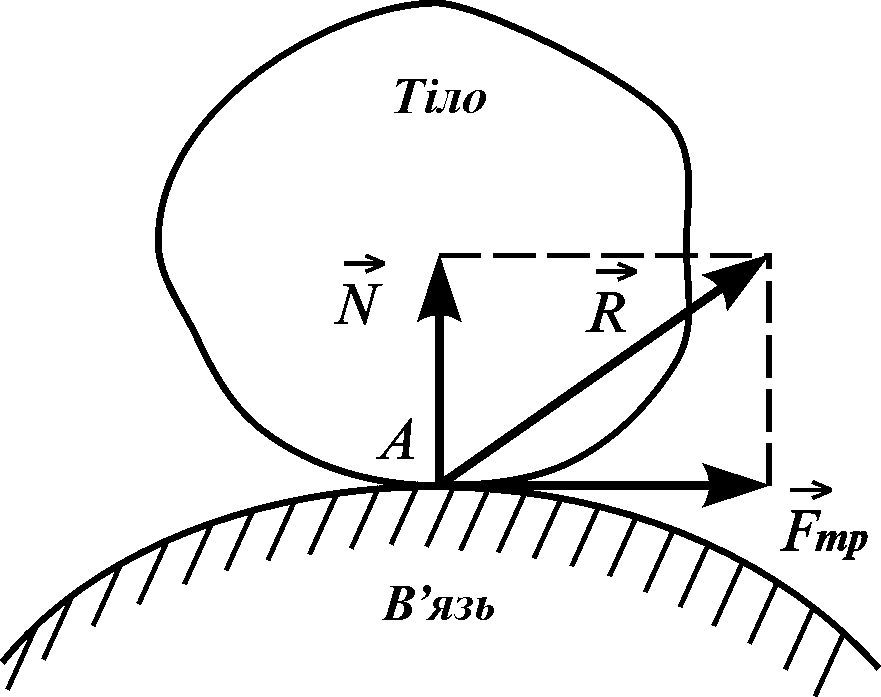
Напрям
реакції
наперед невідомий, тому її розкладають
на дві складові: нормальну реакцію опори
![]() і дотичну – силу тертя
.
і дотичну – силу тертя
.
В’язь – невагома, нерозтяжна ідеальна нитка
В’язь
перешкоджає точці А(С)
об’єкта віддалятися від точки підвішування
В(D)
у напрямі нитки АВ(CD).
Тому реакція
![]() натягнутої нитки спрямована вздовж
нитки від об’єкта до точки її підвісу.
натягнутої нитки спрямована вздовж
нитки від об’єкта до точки її підвісу.
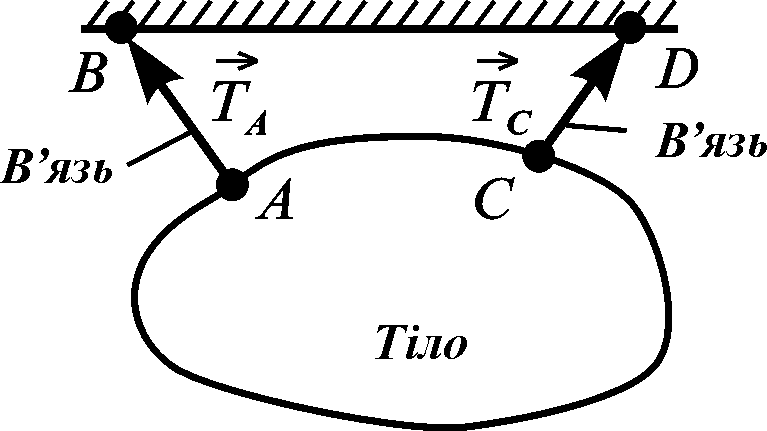
Якщо нитка має вагу, а пряма, що проходить через її кінці, утворює з вертикаллю деякий кут, то характер обмеження, що накладається такою в’яззю на рух точки об’єкта, складніший, і для визначення напряму реакції нитку доцільно розглянути як самостійний об’єкт.
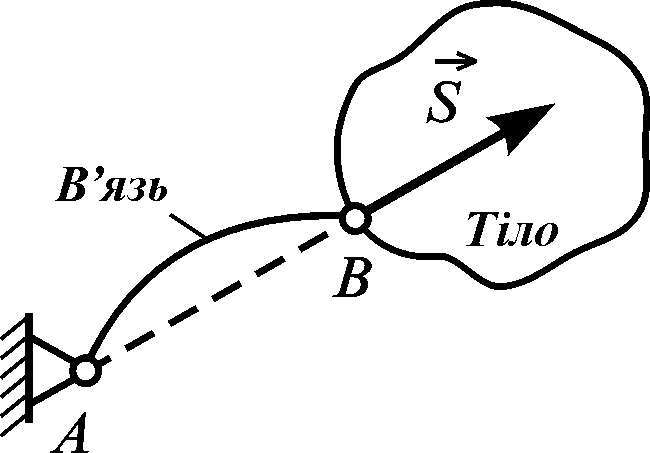
В’язь – стержень
Вважають,
що стержень тонкий невагомий із точковими
шарнірами на кінцях. Такий стержень
перешкоджає переміщенню точки В
об’єкта у напрямі прямої, що проходить
через точкові шарніри А
і В.
Значить і реакція
![]() (зусилля) стержня прикладена в точці В
і спрямована вздовж прямої АВ
до точки А
або від неї.
(зусилля) стержня прикладена в точці В
і спрямована вздовж прямої АВ
до точки А
або від неї.

На відміну від нитки, яка повинна бути завжди натягнута, стержень може бути як розтягнутим, так і стиснутим. Це означає, що заздалегідь можна вказати лише лінію дії реакції стержня (АВ); дійсний напрям реакції визначається з умови рівноваги об’єкта. Зазвичай, задають напрям реакції стержня – від об’єкта до другого точкового шарніра, вважаючи, що стержень розтягнутий. Якщо в результаті розв’язання з урахуванням умов рівноваги об’єкта величина реакції стержня вийде від’ємною, то це означає, що зусилля стержня спрямоване в протилежну сторону, а сам стержень стиснутий.
Якщо стержень має вагу, то характер обмежень, що він накладає на рух точки В об’єкта, буде складнішим. Такий стержень варто розглядати як самостійний об’єкт, для якого точкові шарніри є в’язями.
Б

В’язь – рухома шарнірна опора (коток)
|
|


На відміну від нерухомої шарнірної опори рухлива шарнірна опора не перешкоджає переміщенню точки А об’єкта вздовж опорної гладенької поверхні. Така в’язь перешкоджає переміщенню точки А об’єкта тільки по нормалі до опорної поверхні, тому реакція рухомої шарнірної опори спрямована по нормалі від опорної поверхні.

В’язь – нерухома шарнірна опора
Цю в’язь розглянемо без урахування тертя.
Нерухомий
циліндричний
шарнір
(підшипник, петля, завіса) складається
з нерухомого болта з віссю
![]() (на розрахункових схемах не показують)
і втулки (порожнистий циліндр), яка
насаджена на болт і до якої жорстко
прикріплено тіло.
(на розрахункових схемах не показують)
і втулки (порожнистий циліндр), яка
насаджена на болт і до якої жорстко
прикріплено тіло.
|
|
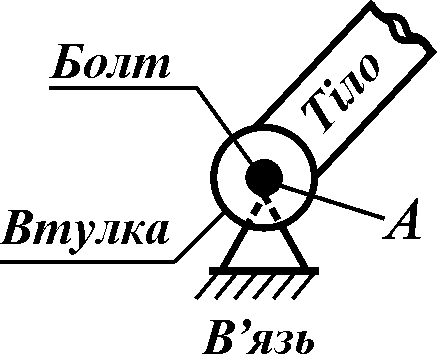

Ця
в’язь не перешкоджає переміщенню точки
А
тіла вздовж осі болта, але не дозволяє
їй переміщатись у площині
![]() ,
перпендикулярній осі шарніра (болта).
Отже, реакція
,
перпендикулярній осі шарніра (болта).
Отже, реакція
![]() шарніра може мати будь-який напрям у
площині
.
Невідому за величиною і напрямом реакцію
подають у вигляді двох складових
шарніра може мати будь-який напрям у
площині
.
Невідому за величиною і напрямом реакцію
подають у вигляді двох складових
![]() і
і
![]() ,
що збігаються з додатними напрямами
осей
,
що збігаються з додатними напрямами
осей
![]() і
і
![]() .
Їх визначають з умов рівноваги об’єкта.
Після цього знаходять реакцію шарніра
А:
.
Їх визначають з умов рівноваги об’єкта.
Після цього знаходять реакцію шарніра
А:
![]() .
.


С

![]() і
і
![]() ,
спрямованими за напрямами взаємно
перпендикулярних осей. Складові реакції
визначають з умов рівноваги об’єкта,
після чого знаходять також повну реакцію
за формулою
,
спрямованими за напрямами взаємно
перпендикулярних осей. Складові реакції
визначають з умов рівноваги об’єкта,
після чого знаходять також повну реакцію
за формулою
![]() .
.

Сферичний шарнір

Підп’ятник
В’язь – площина без тертя, коли контакт з об’єктом
відбувається на деякій площадці CD
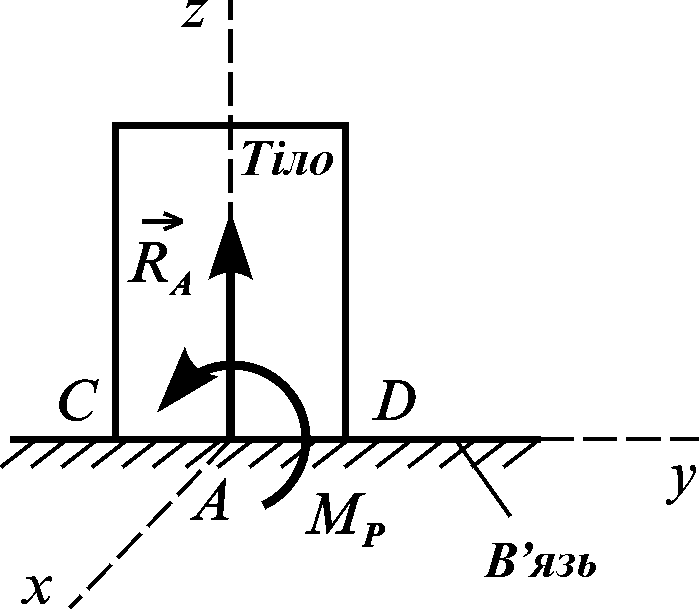
Якщо
вважати, що активні сили, що діють на
об’єкт, розташовані в площині
![]() ,
тому і в’язь обмежує переміщення об’єкта
в площині
.
Площина без тертя з контактом по площадці
CD
не дозволяє об’єкту переміщатися по
нормалі
до площини
,
а також і повертатися навколо осі
,
тому і в’язь обмежує переміщення об’єкта
в площині
.
Площина без тертя з контактом по площадці
CD
не дозволяє об’єкту переміщатися по
нормалі
до площини
,
а також і повертатися навколо осі
![]() .
Тому дія цієї в’язі характеризується
реакцією
,
спрямованою по нормалі до площини
і реактивним моментом
.
Тому дія цієї в’язі характеризується
реакцією
,
спрямованою по нормалі до площини
і реактивним моментом
![]() .
Оскільки реакція розподілена по всій
поверхні площадки CD,
то точка А
прикладання сумарної реакції
може бути обрана в будь-якому місці
площадки CD.
Реактивний
момент
перешкоджає повороту тіла навколо осі
.
.
Оскільки реакція розподілена по всій
поверхні площадки CD,
то точка А
прикладання сумарної реакції
може бути обрана в будь-якому місці
площадки CD.
Реактивний
момент
перешкоджає повороту тіла навколо осі
.