

Приклади
Приклад 2.1. Рівнозмінний рух точки.
Рух
точки називають рівнозмінним, якщо її
дотичне прискорення стале (![]() ).
).
Знайдемо швидкість точки і закон її руху по траєкторії.
На підставі (2.34)
![]() ,
,
звідки
![]() .
.
За формулою (2.21)
![]() ,
,
звідки після інтегрування маємо
![]() ,
,
де
![]() і
і
![]() – сталі інтегрування, що знаходяться
з початкових умов.
– сталі інтегрування, що знаходяться
з початкових умов.
У даному випадку початковими умовами є початкова швидкість і початкова дугова координата. Нехай
![]() .
.
Дістанемо:
![]() ;
(2.36)
;
(2.36)
![]() .
(2.37)
.
(2.37)
Приклад 2.2. Рух точки відбувається згідно з рівняннями
![]()
( – в метрах, – в секундах).
Визначити:
— швидкість точки;
— закон руху точки по траєкторії;
— годограф швидкості;
— прискорення точки;
— радіус кривини траєкторії точки.
Розв’язання.
Виберемо
систему координат, як показано на рис.
2.11.
![]() – початкове положення точки на траєкторії.
– початкове положення точки на траєкторії.
Складові швидкості точки дорівнюють:
![]() .
.
Модуль швидкості
![]() .
.
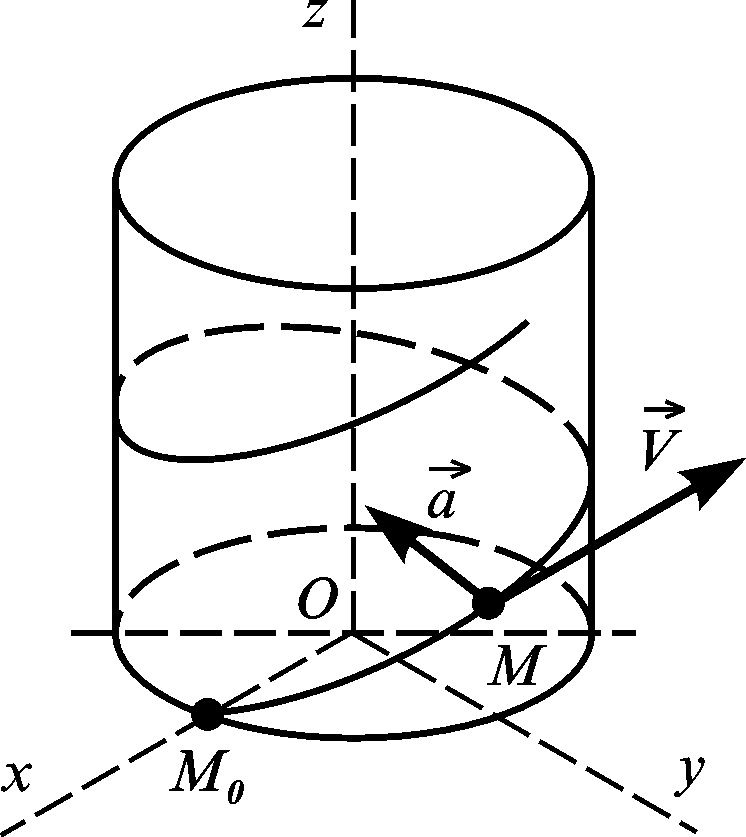
Рисунок 2.11
Траєкторією точки є гвинтова лінія. Напрям швидкості, тобто напрям дотичної до гвинтової лінії (рис. 2.11), визначаємо за формулами
![]()
![]()
![]() .
.
Годограф швидкості знаходимо на підставі формул
![]() .
.
Звідси
![]() –
рівняння годографа швидкості (рис.
2.12).
–
рівняння годографа швидкості (рис.
2.12).
Отже,
годографом швидкості є коло радіуса
![]() з центром в точці
з центром в точці
![]() на осі
.
на осі
.
Знайдемо
закон руху точки по траєкторії
![]() :
:
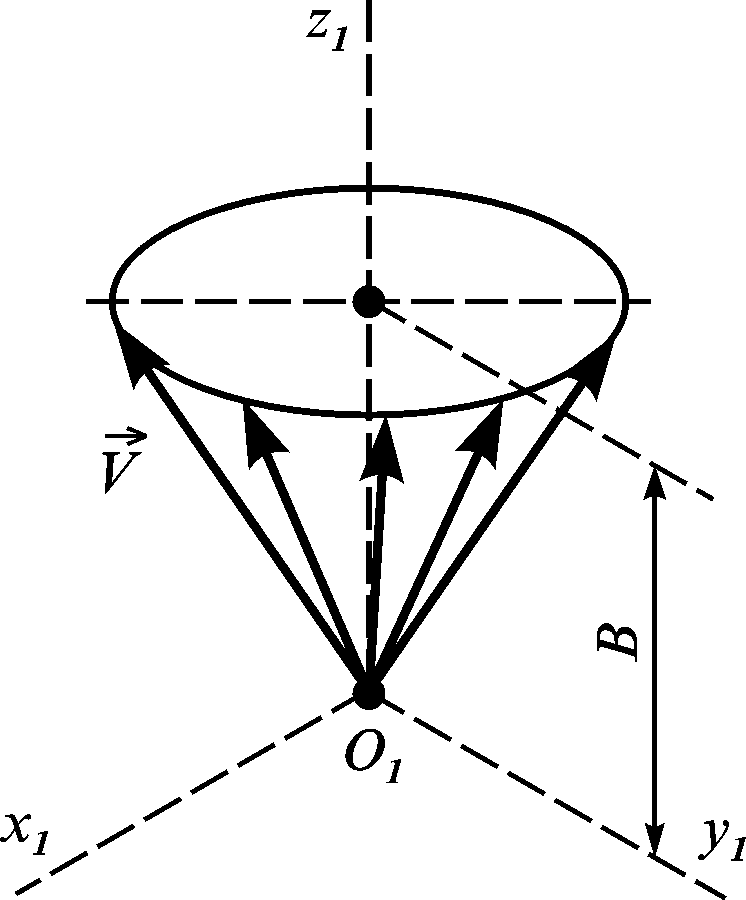
Рисунок 2.12
![]() .
.
При
![]() ,
тобто
,
тобто
![]() .
.
![]() .
.
Для визначення проекцій, модуля та напряму прискорення скористаємося формулами (2.25)-(2.27). Маємо:
![]() ;
;
![]() .
.
Вектор прискорення лежить в горизонтальній площині і спрямований від точки М до осі (рис. 2.11).
Радіус кривини точки знаходимо на підставі (2.34). Нормальне прискорення визначаємо через повне і тангенціальне за формулами (2.34) і (2.35):
![]() .
.
Оскільки
![]() а
а
![]() ,
то
,
то
![]() .
Знаходимо
.
Знаходимо
![]() .
.
Задачі для самостійного розв’язування
Задача
2.1.
Рух точки відбувається за законом
![]() ;
;
![]() .
Визначити швидкість
,
прискорення
точки а,
радіус кривини траєкторії
і закон руху точки по траєкторії
.
Визначити швидкість
,
прискорення
точки а,
радіус кривини траєкторії
і закон руху точки по траєкторії
![]() .
.
Відповідь:
![]() .
.
Задача 2.2. У певний момент часу повне прискорення точки дорівнює 2,6 м/с2. Точка рухається по кривій з дотичним прискоренням 1,4 м/с2. Знайти для даного моменту часу нормальне прискорення точки.
Відповідь:
![]() м/с2.
м/с2.
Запитання для самоконтролю
Що називають траєкторією точки?
Як можна визначити положення точки в просторі?
У чому полягає зміст натурального способу визначення руху точки?
Що називають дуговою координатою?
Як знайти шлях, що його проходить точка?
Що таке швидкість точки?
Як знайти швидкість точки координатним способом?
Рух визначається натуральним способом. Чому дорівнює швидкість точки?
Що називають годографом векторної функції?
Що називають прискоренням? Як напрямлений вектор прискорення?
Як визначають прискорення координатним способом?
Рух точки визначається натуральним способом. Як знайти прискорення точки?
У чому полягає фізичний зміст складових прискорення: тангенціального і нормального?