

Теорема про три сили
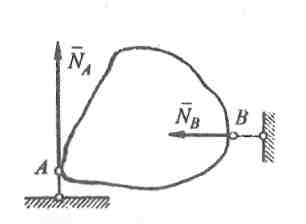
Якщо тіло знаходиться у рівновазі під дією трьох непаралельних сил, що лежать в одній площині, то лінії дії цих сил перетинаються в одній точці
Ц
Рис.
1.5.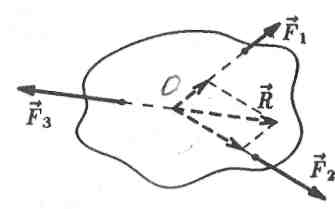
![]() і
і
![]() вздовж
їх ліній дії в точку перетину 0
(рис. 1.5)
і складімо їх, згідно о другою аксіомою,
а потім врівноважимо, згідно о першою
аксіомою, одержану рівнодійну третьою
силою
вздовж
їх ліній дії в точку перетину 0
(рис. 1.5)
і складімо їх, згідно о другою аксіомою,
а потім врівноважимо, згідно о першою
аксіомою, одержану рівнодійну третьою
силою
![]() .
.
Типи в'язей та їх реакції
При розв'язуванні задач про рівновагу невільних тіл широко застосовується аксіома про звільнення від в'язей. Відкидаючи в'язь, її дію заміняють силою, яка називається реакцією в'язі. Реакція в'язі - це сила, що діє на дане тіло з боку в'язі (тобто протидія в'язі на дію даного тіла). Таким чином необхідно знати характер дії тієї чи іншої в'язі та напрям її реакції
Роль в'язей (опор) на практиці виконують різні тіла і конструкції, основними з яких є:
нитка (шнур, трос, ланцюг, ремінь) - утримує тіло лише в напрямі свого натягу
 (рис. 1.6);
(рис. 1.6);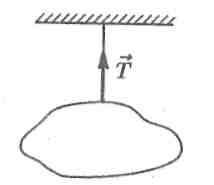 р
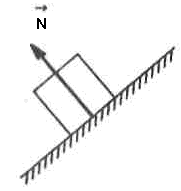
р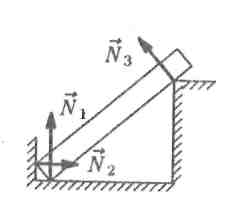 ебро
(кут, вістря) — реакція перпендикулярна
до тіла або до дотичної до нього в точці
контакту (рис. 1.7);
ебро
(кут, вістря) — реакція перпендикулярна
до тіла або до дотичної до нього в точці
контакту (рис. 1.7);
Рис. 1.6. Рис. 1.7.
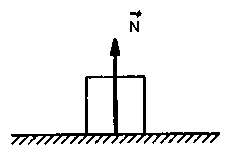
ідеально гладенька поверхня (або каток) обмежує рух тіла лише у напрямі, перпендикулярному до поверхні і дозволяє рухатись у всіх інших напрямах. Реакцією гладенької поверхні є одна сила
 ,
направлена перпендикулярно до цієї
поверхні або до дотичної у точці контакту
тіла з поверхнею
(рис.1.8)
У техніці до опори на ідеально гладеньку
поверхню прирівнюється опора на катках
(рис. 1.9).
Реакція
катка направлена перпендикулярно до
поверхні, по якій котиться каток;
,
направлена перпендикулярно до цієї
поверхні або до дотичної у точці контакту
тіла з поверхнею
(рис.1.8)
У техніці до опори на ідеально гладеньку
поверхню прирівнюється опора на катках
(рис. 1.9).
Реакція
катка направлена перпендикулярно до
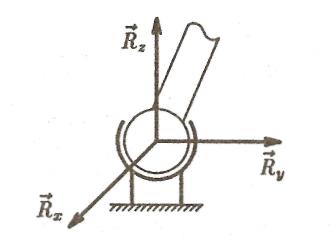
поверхні, по якій котиться каток;циліндричний шарнір (підшипник) — конструкція яка складається з нерухомого стержня (осі шарніра) і обойми (втулки), що може обертатись навколо стержня. Тіло з'єднане о рухомою втулкою, може вільно рухатись вздовж осі шарніра Оz, але зустрічає протидію у напрямі осей Ох і Оу (рис. 1.10а).
б
а
Рис. 1.8.
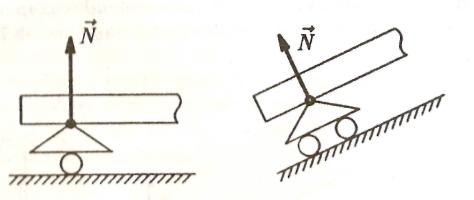
Рис. 1.9.

а б
Рис. 1.10.
Таким
чином, реакція
циліндричного шарніра має дві складові
![]() x
і
y,
які лежать у площині, перпендикулярній
до осі шарніра. Модуль
реакції виражається через теорему
Піфагора
x
і
y,
які лежать у площині, перпендикулярній
до осі шарніра. Модуль
реакції виражається через теорему
Піфагора
![]() .
Схематично
циліндричний шарнір найчастіше зображують
у вигляді, показаному на рис. 1.10б;
.
Схематично
циліндричний шарнір найчастіше зображують
у вигляді, показаному на рис. 1.10б;
с
 феричний
шарнір
-
дозволяє
тілу, зв'язаному з обоймою, вільно
обертатись навколо шарніра, але
перешкоджає рухатись поступально
у всіх трьох напрямах простору (обмежує
три степені вільності тіла) і має
три складові реакції
феричний
шарнір
-
дозволяє
тілу, зв'язаному з обоймою, вільно
обертатись навколо шарніра, але
перешкоджає рухатись поступально
у всіх трьох напрямах простору (обмежує
три степені вільності тіла) і має
три складові реакції
 (рис.
1.11);
(рис.
1.11);
Рис. 1.11. Рис. 1.12.
ідеальний стержень (невагомий стержень з шарнірами на кінцях) - протидіє лише у напрямі своєї осі або у напрямі, що з'єднує шарніри на кінцях стержня у випадку криволінійного стержня (рис. 1.12), тобто має одну реакцію
 .
. нерухоме
защемлення балки
(консоль)
-
виключає
будь-яке переміщення
балки у площині - і поступальне,
і обертальне. Реакція
нерухомого защемлення має дві взаємно
перпендикулярні складові
нерухоме
защемлення балки
(консоль)
-
виключає
будь-яке переміщення
балки у площині - і поступальне,
і обертальне. Реакція
нерухомого защемлення має дві взаємно
перпендикулярні складові
 і
і
 та момент защемлення
та момент защемлення
 ,
який
протидіє повороту балки в даній площині
(рис. 1.13).
,
який
протидіє повороту балки в даній площині
(рис. 1.13).
Рис. 1.13.