

Абсолютне прискорення точки у складному русі
Для визначення абсолютного прискорення точки у складному русі запишемо формулу (2.103) о урахуванням у (2.98) і (2.100) такому вигляді
![]() (2.104)
(2.104)
і візьмемо від нього похідну по часу:
 (2.105)
(2.105)
Тут
![]() -
вектор
абсолютного прискорення точки;
-
вектор
абсолютного прискорення точки;
![]() - вектор
кутового прискорення рухомої системи
(тіла
або середовища).
- вектор
кутового прискорення рухомої системи
(тіла
або середовища).
Введемо такі значення для виразів у дужках формули (2.105):
![]() -
радіус-вектор точки в рухомій системі
координат;
-
радіус-вектор точки в рухомій системі
координат;
![]() - відносна
швидкість точки;
- відносна
швидкість точки;
![]() ;
;
![]() - відносне
прискорення точки;
- відносне
прискорення точки;
![]() .
.
Як бачимо, весь великий вираз у правій частині формули (2.105) зводиться до п'яти доданків, два з яких однакові
![]() ,
,
або
![]() . (2.106)
. (2.106)
Перші два доданки правої частини цієї формули являють прискорення переносного руху, тобто прискорення тієї точки чи середовища, в якій в даний момент знаходиться рухома точка М:
![]() .
(2.107)
.
(2.107)
Останній доданок виразу (2.106) являє собою так зване поворотне або королісове прискорення
![]() , (2.108)
, (2.108)
а відтак і теорема про визначення абсолютного прискорення точки в складному русі називається теоремою Коріоліса на честь французького механіка, який вперше довів цю теорему:
![]() . (2.109)
. (2.109)
Теорема Коріоліса формулюється так; абсолютне прискорення точки в складному русі знаходиться як векторна сума переносного, відносного і коріолгсового прискорень.
Розглянемо
більш детально переносне прискорення.
Із формули
(2.107)
бачимо, що переносне прискорення
![]() складається із
суми двох доданків
складається із
суми двох доданків
![]() та
та
![]() .
Перший
вектор являє
собою переносне дотичне (або тангенціальне)
прискорення,
а другий - переносне нормальне прискорення:
.
Перший
вектор являє
собою переносне дотичне (або тангенціальне)
прискорення,
а другий - переносне нормальне прискорення:
![]() , (2.110)
, (2.110)
або по модулю
![]()
![]() . (2.111)
. (2.111)
Напрями
прискорень
![]() і
і
![]() аналогічні розглянутим у розділі про
обертання
тіла навколо осі: вектор
збігається з напрямом переносної
швидкості
при прискореному переносному обертання
тіла і протилежний йому при сповільненому.
Вектор
направлений
до центру обертання тіла.
аналогічні розглянутим у розділі про
обертання
тіла навколо осі: вектор
збігається з напрямом переносної
швидкості
при прискореному переносному обертання
тіла і протилежний йому при сповільненому.
Вектор
направлений
до центру обертання тіла.
Прискорення корюліса
Модуль прискорення Коріоліса знаходиться як модуль подвоєного векторного добутку двох векторів (див. формулу (2.108)):
![]() . (2.112)
. (2.112)
Як можна судити з формули (2.112), модуль коріолісового прискорення дорівнює нулю в трьох випадках:
(переносний рух тіла поступальний);
 (точка
в дану мить зупинилась);
(точка
в дану мить зупинилась); (вектор
паралельний
вектору
).
(вектор
паралельний
вектору
).
Напрям
вектора коріолісового прискорення
![]() визначається
або
згідно з правилом векторного добутку
двох векторів, або за допомогою
правила Жуковського.
визначається
або
згідно з правилом векторного добутку
двох векторів, або за допомогою
правила Жуковського.
Згідно з правилом векторного добутку з формули
(2.113)
бачимо, що вектор перпендикулярний до площини, яку створюють вектори і , і направлений у той бік, звідки поворот від першого вектора до другого вектора відбувається проти годинникової стрілки найкоротшим шляхом.
 Згідно
з правилом
Жуковського,
для
визначення напряму прискорення
Коріоліса потрібно повернути
вектор
на
90°
у бік обертання тіла
у
випадку, коли вектор відносної
швидкості
точки
перпендикулярний
вектору кутової швидкості
)
переносного
руху тіла (див. рис. 2.24б
і рис. 2.25а).
Згідно
з правилом
Жуковського,
для
визначення напряму прискорення
Коріоліса потрібно повернути
вектор
на
90°
у бік обертання тіла
у
випадку, коли вектор відносної
швидкості
точки
перпендикулярний
вектору кутової швидкості
)
переносного
руху тіла (див. рис. 2.24б
і рис. 2.25а).
Рис. 2.24.
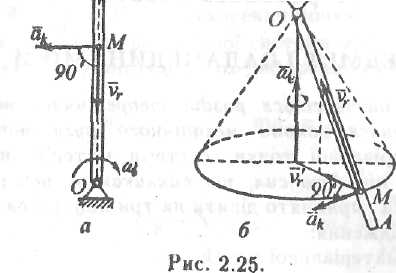
Якщо
вектори
і
не
перпендикулярні між собою, то потрібно
спочатку
спроектувати вектор
на площину, перпендикулярну
до
вектора
,
а потім одержану проекцію
![]() повернути на
повернути на
![]() у
напрямі обертання тіла
(див.
рис. 2.24а
і рис. 2.25б).
у
напрямі обертання тіла
(див.
рис. 2.24а
і рис. 2.25б).