

Складний рух точки
У розділі "кінематика точки" ми вивчали рух точки відносно декартової системи координат, яка безумовно вважалась нерухомою. Однак у дійсності не існує абсолютно нерухомих систем відліку, а є лише умовно нерухомі, адже в природі все рухається, бо рух - це спосіб існування матерії.
У більшості технічних задач системи координат, зв'язані з Землею (так звані геоцентричні системи), вважаються нерухомими. Але ці ж системи в розрахунках, пов'язаних із космічними польотами, розглядаються як рухомі, а за нерухому приймається система, зв'язана з Сонцем (так звана геліоцентрична система).
У машинах і апаратах харчових виробництв, особливо в складних автоматах, у роботах-маніпуляторах досить часто доводиться одночасно розглядати рух якогось фізичного об'єкта (матеріальної точки) відносно двох і більше систем координат, одна із яких рухається відносно іншої.
Простим і дуже наочним прикладом, що ілюструє необхідність двох систем координат, є рух пасажира по палубі рухомого корабля, за яким спостерігають з берега. Рух пасажира (точки) відносно спостерігача на березі буде складним, тобто складатиметься з руху корабля і власного руху пасажира відносно корабля.
Якщо з берегом зв'язати нерухому систему координат, а з кораблем - рухому систему, то рух точки (пасажира) відносно нерухомої системи координат називатимемо абсолютним рухом, а рух відносно рухомої системи - відносним рухом. Рух рухомої системи координат відносно нерухомої (корабля відносно берега) називається переносним рухом. Точніше кажучи, переносним рухом для даного пасажира буде рух того місця (точки) корабля, у якому пасажир перебуває в даний момент.
Швидкість і прискорення точки у складному русі також відповідно називаються абсолютною, відносною і переносною швидкістю та абсолютним, відносним і переносним прискоренням.
Оскільки основними задачами кінематики є визначення закону руху і встановлення залежностей між кінематичними характеристиками рухомого об'єкта, то спробуємо записати рівняння складного руху точки.
Нехай
точка М
рухається
по поверхні рухомого тіла (або середовища)
описуючи деяку криволінійну траєкторію
(рис. 2.23).
Виберемо
нерухому декартову систему координат
![]() і
рухому
систему координат
і
рухому
систему координат
![]() ,
незмінно
зв'язану
з
тілом
(або середовищем).
,
незмінно
зв'язану
з
тілом
(або середовищем).
З
точки
![]() до
точки М
проведемо
радіус-вектор
до
точки М
проведемо
радіус-вектор
![]() ,
а
з точки
,
а
з точки
![]() рухомої
системи координат - радіус-вектор
.
Рух
точки О
відносно
нерухомої точки
будемо
фіксувати
радіусом-вектором
рухомої
системи координат - радіус-вектор
.
Рух
точки О
відносно
нерухомої точки
будемо
фіксувати
радіусом-вектором
![]() .
Очевидно,
що в кожну мить справедлива
рівність
.
Очевидно,
що в кожну мить справедлива
рівність
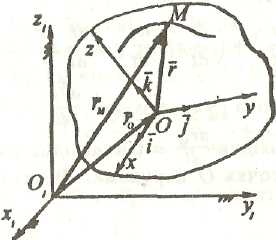
Рис. 2.23.
![]() (2.94)
(2.94)
або
![]() , (2.95)
, (2.95)
яка
є
законом
руху точки. Тут
![]() - одиничні вектори
рухомої
системи координат,
- одиничні вектори
рухомої
системи координат,
![]() - проекції
радіуса-вектора
на
рухомі
осі.
- проекції
радіуса-вектора
на
рухомі
осі.
Абсолютна швидкість точки у складному русі
Для
встановлення залежностей між абсолютною,
відносною і переносною швидкостями
точки в її складному русі розглянемо
окремий
випадок, коли рухома система
(тобто тіло чи середовище)
лише обертається з кутовою швидкістю
![]() і
кутовим прискоренням
і
кутовим прискоренням
![]() навколо
деякої осі ОN,
тобто
коли переносний рух
є обертальним. Тут і надалі для позначення
переносного руху
застосовуємо індекс е,
відносного руху - індекс r,
абсолютного
руху -
а.
навколо
деякої осі ОN,
тобто
коли переносний рух
є обертальним. Тут і надалі для позначення
переносного руху
застосовуємо індекс е,
відносного руху - індекс r,
абсолютного
руху -
а.
Швидкість точки М визначимо як першу похідну від радіуса-вектора
![]() , (2.96)
, (2.96)
або
![]() . (2.97)
. (2.97)
Згідно
з визначенням абсолютного руху, похідна
![]() є абсолютною швидкістю точки, а похідна
є абсолютною швидкістю точки, а похідна
![]() внаслідок того, що в нашому окремому
випадку точка О
нерухома. Векторна сума
внаслідок того, що в нашому окремому
випадку точка О
нерухома. Векторна сума
![]() (2.98)
(2.98)
є
вектором відносної швидкості точки
![]() .
.
Похідні по часу від одиничних векторів являють собою швидкості кінців цих ортів при обертанні тіла навколо осі ОN і можуть бути виражені через кутову швидкість обертання згідно з формулою Ейлера
![]() , (2.99)
, (2.99)
де - кутова швидкість переносного обертального руху тіла навколо осі ОN.
Таким чином, третю векторну суму в формулі (2.97) з урахуванням виразів (2.99) можемо привести до вигляду
![]() , (2.100)
, (2.100)
який
визначає переносну швидкість
![]() у складному русі точки.
у складному русі точки.
Остаточний вигляд формули (2.97) буде таким
![]() (2.101)
(2.101)
тобто абсолютна швидкість точки в складному русі дорівнює векторній сумі швидкостей відносного і переносного рухів.
Тепер покажемо, що цей висновок справедливий і для випадку поступального переносного руху тіла. Дійсно, при поступальному переносному русі всі точки рухомої системи координат, в тому числі і її початок (точка О), мають однакові швидкості, а напрями одиничних ортів залишаються незмінними і їх похідні по часу дорівнюють нулю.
Таким чином, вираз (2.97) можемо написати у вигляді
![]() . (2.102)
. (2.102)
Тут
![]() - абсолютна
швидкість точки,
- абсолютна
швидкість точки,
![]() - швидкість
переносного поступального руху тіла,
- швидкість
переносного поступального руху тіла,
![]() - відносна
швидкість точки.
- відносна
швидкість точки.
Отже формулу (2.102) можемо переписати у такому ж вигляді, який ми отримали у випадку переносного обертального руху
, (2.103)
що підтверджує справедливість даної формули як для поступального, так і для обертального переносного руху тіла.