

Контрольные вопросы
1. Что понимается под определениями желаемая передаточ-
ная функция, желаемая ЛАЧХ?
2.Каким основным требованиям должна удовлетворять же-
лаемая ЛАЧХ? Перечислите динамические показатели ка-
чества.
3. Поясните содержание основных этапов формирования же
лаемой ЛАЧХ.
В отсутствие заданного гармонического закона входного
воздействия, как рассчитать эквивалентный ему закон и
какие данные для этого требуются?
Какими координатами определяется местонахождение ра-
бочей точки?
6. С каким наклоном проводится низкочастотная асимптота
в системе 1-го порядка астатизма?
7. Как строится запретная область?
8. Как определяется коэффициент усиления желаемой систе-
мы в децибелах и безразмерных единицах?
9. Какому из показателей качества должно удовлетворять ра-
сположение низкочастотной асимптоты желаемой ЛАЧХ?
10. С каким наклоном проводится среднечастотная асимпто-
та желаемой ЛАЧХ?
11.За какие показатели качества «отвечает» среднечастотная
асимптота?
Какой параметр среднечастотной асимптоты влияет на
перерегулирование?
На какой показатель качества и как влияет частота среза желаемой ЛАЧХ?
Чем руководствуются при формировании желаемой ЛАЧХ в области высоких частот?
В чем заключается пошаговый метод построения желаемой ЛАЧХ?
7.2 Синтез последовательного корректирующего
Устройства
Последовательные корректирующие устройства получили большое распространение вследствие легкости и относительной простоты их реализации как на пассивных 4-х полюсниках, так и с помощью операционных усилителей интегрального исполнения.
Структурная схема системы с последовательным корректирующим устройством представлена на рис.7.8. В схеме приняты обоз-

Рис.7.8
начения: Кдоп – дополнительный коэффициент усиления;
П(s) – передаточная функция последовательного корректирующего устройства; Wи(s) – общая передаточная функция исходной системы. Задачей синтеза последовательного корректирующего устройства является определение его передаточной функции П(s) и
Кдоп . Решение этой задачи выполняется в следующем порядке:
а) по требованиям, предъявляемым к проектируемой системе строится желаемая ЛАЧХ – LЖ (рис.7.9) ;
б) по параметрам элементов, входящих в исходную систему, строится её ЛАЧХ – LИ;
в) так как коэффициент усиления исходной системы, как правило, не обеспечивает требуемой точности, то по разности коэффициентов передачи (в децибелах) желаемой и исходной ЛАЧХ на рабочей частоте определяют величину Кдоп в дБ (рис.7.9);
г) по передаточной функции нескорректированной системы
Wн(s) = Кдоп ∙Wи(s) строится её ЛАЧХ – LН;
д) уточняется вид желаемой ЛАЧХ в области высоких частот. Это уточнение заключается в постепенном приближении к ЛАЧХ нескорректированной системы вплоть до пересечения и дальнейшего совпадения с ней (см.точечный пунктир желаемой ЛАЧХ между частотами ω4 и ω6 на рис.7.9). Еще лучше, когда высокочастотная часть желаемой ЛАЧХ с некоторой частоты (например, с частоты сопряжения ω5 нескорректированной системы) повторяет наклоны нескорректированной ЛАЧХ, располагаясь под ней (см. жирную пунктирную асимптоту желаемой ЛАЧХ на рис.7.9). В этом случае высокочастотные помехи ослабляются, так как коэффициент передачи корректирующего устройства становится меньше единицы;
е) исходя из равенства передаточных функций
![]() ,
,
определяется
![]() ;
(7.20)
;
(7.20)
ж)
по условиям коррекции требуется равенство
коэффициентов передачи желаемой и
скорректированной систем в определенном
частотном диапазоне. Поэтому на основании
(7.20)
![]() строится ЛАЧХ последовательного
корректирующего устройства – LП.
Построение ведется путем вычитания LН
из LЖ
по отдельным частотным диапазонам,
определяемым двумя соседними частотами
сопряжения на любой из двух ЛАЧХ (LH
и
LЖ).
Для наглядности процедуры представим
её в форме таблицы 7.1
строится ЛАЧХ последовательного
корректирующего устройства – LП.
Построение ведется путем вычитания LН
из LЖ
по отдельным частотным диапазонам,
определяемым двумя соседними частотами
сопряжения на любой из двух ЛАЧХ (LH
и
LЖ).
Для наглядности процедуры представим
её в форме таблицы 7.1
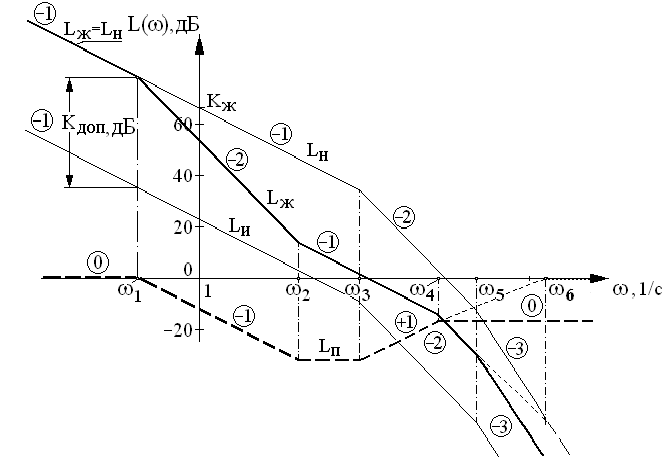
Рис.7.9
Таблица 7.1
Диапазон частот |
Наклон LЖ |
Наклон LН |
Наклон LП (Разность наклонов LЖ– LН) |
0 ≤ ω ≤ ω1 |
–1 |
–1 |
0 |
ω1 ≤ ω ≤ ω2 |
–2 |
–1 |
–1 |
ω 2 ≤ ω ≤ ω3 |
–1 |
–1 |
0 |
ω3 ≤ ω ≤ ω4 |
–1 |
–2 |
+1 |
ω4 ≤ ω ≤ ω5 |
–2 |
–2 |
0 |
ω5 ≤ ω ≤ ω6 |
–3 |
–3 |
0 |
Отметим, что вся ЛАЧХ последовательного корректирующего устройства (см. жирный пунктир) лежит в области отрицательных значений амплитуд, то есть коэффициент передачи корректирующего устройства меньше единицы.
Далее по виду ЛАЧХ записывается передаточная функция WП(s) последовательного корректирующего устройства.
![]()
где Т1= 1/ω1; Т2= 1/ω2; Т3= 1/ω3; Т1= 1/ω1; Т4= 1/ω4.
(Для случая, когда ЛАЧХ последовательного корректирующего устройства в высокочастотной области продлевается до совпадения с ЛАЧХ нескорректированной системы – точечный пунктир, передаточная функция равна:
![]() где
Т6=
1/ω6).
где
Т6=
1/ω6). ![]()
Электрическую схему пассивного корректирующего устройства можно узнать из справочных таблиц (4,5), фрагмент которых приведен в Приложении 4 по виду ЛАЧХ. Сопоставляя полученную ЛАЧХ корректирующего устройства с приведенной в таблице Приложения 4, выбираем схему под номером 8 или 7.
Пример 1. Для системы, функциональная схема которой дана на рис.7.10 синтезировать последовательное корректирующее устройство П(s) по следующим данным:
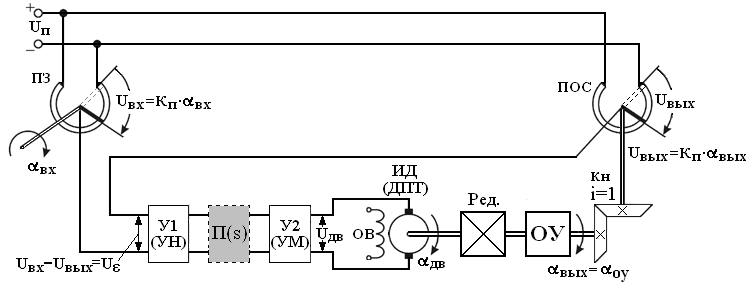
Рис.7.10
Система должна отслеживать задаваемое угловое положение объекта управления;
КП – коэффициент передачи (крутизна) потенциометров задающе-
го и обратной связи – 3 В/рад;
КУ – общий коэффициент усиления усилителя напряжения (УН) и усилителя мощности (УМ) – 400;
КДВ – коэффициент передачи двигателя – 4 Рад/ В∙с;
КР – коэффициент передачи редуктора – 0,0015;
ТМ – постоянная времени двигателя механическая – 0,04 с;
ТЭ – постоянная времени двигателя электрическая – 0,004 с;
ТУ – постоянная времени усилителя – 0,002 с;
Максимальная скорость, развиваемая объектом управления (ОУ) – αоу׳ = 1,75 с–1;
Максимальное ускорение, развиваемое ОУ – αоу״ = 0,7 с–2 ;
εm – установившаяся ошибка при гармоническом воздействии
≤ 0,0025 рад;
σ – коэффициент перерегулирования ≤ 20 %;
tp – время регулирования ≤ 0,2 с при допустимом отклонении равном ± 5% h(∞).
Решение. На основании функциональной схемы составим структурную схему (рис.7.11) и запишем передаточную функцию

Рис. 7.11
исходной системы.
 (7.21)
(7.21)
По формулам (7.4) и (7.5) находим рабочую частоту и амплитуду эквивалентного гармонического воздействия:
![]() ;
;

Исходя из требуемой точности воспроизведения гармонического
воздействия, определяется минимальное значение коэффициента
передачи на рабочей частоте в децибелах:
![]()
Делаем поправку на 4-ре децибела и принимаем окончательно координаты рабочей точки равными:
![]() (7.22)
(7.22)
Через точку с координатами (7.22) проводим низкочастотную аси-
мптоту с наклоном –1, поскольку исходная передаточная функция содержит одно интегрирующее звено. На частоте ω = 1 с–1 по уравнению (7.16) низкочастотной асимптоты определяем КЖ в децибелах:
![]()
Из рабочей точки проводится асимптота с –2 наклоном до уровня амплитуды равного 12 дБ и далее – среднечастотная асимптота с наклоном –1 до уровня амплитуды равного –12 дБ. Из конца среднечастотной асимптоты в область высоких частот проводится асимптота с наклоном –2, которая после построения ЛАЧХ неско-
рректированной системы будет уточняться.
По передаточной функции исходной системы (7.21) строится ЛАЧХ – LИ (рис.7.12). Так как коэффициент усиления (КИ = 17 дБ) исходной системы не обеспечивает требуемой точности, то его необходимо увеличить до значения, равного КЖ = 61 дБ. С этой целью применяется дополнительное усиление КДОП = КЖ – КИ = = 44 дБ. Путем перемещения ЛАЧХ исходной системы параллельно самой себе по вертикали до совпадения низкочастотных асимптот LИ и LЖ добиваемся выполнения условия по точности. Полученная ЛАЧХ обозначается LН и принадлежит нескорректированной системе. Эта ЛАЧХ очевидно отличается от желаемой и поэтому требуется её коррекция.
Перед тем как воспользоваться вышеизложенной методикой
следует уточнить вид желаемой ЛАЧХ в высокочастотной части.
Чтобы упростить электрическую схему корректирующего устройства и минимизировать коэффициент передачи высокочастотных помех, асимптоту с наклоном –2 на частоте сопряжения ωЭ изменяют на –3 наклон. И далее наклоны желаемой ЛАЧХ проводятся параллельно наклонам нескорректированной системы.

Рис.7.12
Так
как последняя частота сопряжения ωУ
существенно превышает частоту среза
ωСР (![]() ),
то влиянием соответствующего
апериодического звена можно пренебречь.
Уточненная передаточная функция
желаемой ЛАЧХ будет равна:
),
то влиянием соответствующего
апериодического звена можно пренебречь.
Уточненная передаточная функция
желаемой ЛАЧХ будет равна:
![]() ,
,
где
![]() Перед тем как получить ЛАЧХ корректирующего
устройства следует убедиться, что
желаемая система отвечает требуемым
динамическим показателям. С этой целью
проводится математическое моделирование.
Проверка показателей качества желаемой
системы нашего примера проводилась с
использованием программного комплекса
МВТУ и дала следующие результаты
(рис.7.13). Коэффициент перерегулирования
σ = 23,3%, а время регулирования tp
= 0,172 c.
Перед тем как получить ЛАЧХ корректирующего
устройства следует убедиться, что
желаемая система отвечает требуемым
динамическим показателям. С этой целью
проводится математическое моделирование.
Проверка показателей качества желаемой
системы нашего примера проводилась с
использованием программного комплекса
МВТУ и дала следующие результаты
(рис.7.13). Коэффициент перерегулирования
σ = 23,3%, а время регулирования tp
= 0,172 c.

Рис. 7.13
Cформированная ЛАЧХ желаемой системы не удовлетворяет показателю перерегулирования. Так как за этот показатель отвечает протяженность среднечастотной асимптоты, то её продлим до частоты сопряжения ωЭ (рис.7.14) и считаем, что ω3 = ωЭ.

Рис.7.14
Запишем передаточную функцию уточненной желаемой ЛАЧХ, по которой проверим показатели качества:
![]() (7.23)
(7.23)
Математическое моделирование без учета апериодического звена с частотой сопряжения ωУ дало (рис.7.15) следующие результаты: σ = 18,4% < 20 % и tp = 0,182 c < 0,2 c.
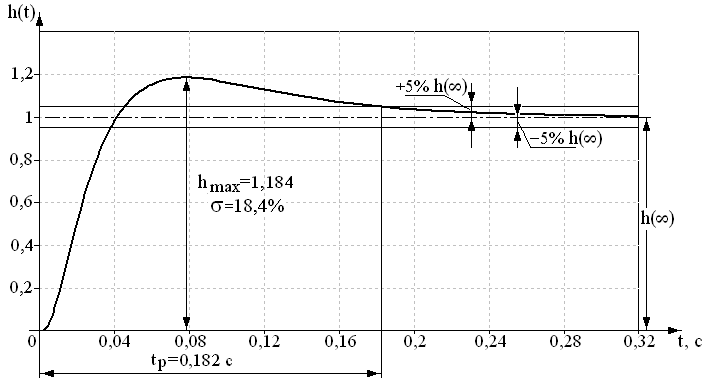
Рис.7.15
Полученные удовлетворительные результаты позволяют построить ЛАЧХ последовательного корректирующего устройства
путем вычитания LH из LЖ в отдельных частотных диапазонах
(см. таблицу 7.2)
Таблица 7.2
-
Диапазон
частот
Наклон LЖ
Наклон LН
Наклон LП
(Разность
наклонов LЖ– LН)
0 ≤ ω ≤ ω1
–1
–1
0
ω1 ≤ ω ≤ ω2
–2
–1
–1
ω 2 ≤ ω ≤ ωм
–1
–1
0
ωм ≤ ω ≤ ω3
–1
–2
+1
ω3 ≤ ω ≤ ω4
–2
–2
+1
ω4 ≤ ω ≤ ωу
–3
–3
0
ωу ≤ ω ≤ ∞
–3
–3
0
Полученная ЛАЧХ последовательного корректирующего устройства (жирная ломаная кривая – LП на рис.7.14) позволяет записать передаточную функцию корректирующего устройства в числовом выражении:
![]() ,
(7.24)
,
(7.24)
где
![]() ,
а значения частот соответствуют точкам
излома ЛАЧХ корректирующего устройства.
Вид ЛАЧХ (рис.7.16,а) позволяет выбрать
принципиальную электрическую схему
реализации (рис.7.16,б) и рассчитать
параметры её резисторов и конденсаторов
(см. Приложение
3 пункт 8).
,
а значения частот соответствуют точкам
излома ЛАЧХ корректирующего устройства.
Вид ЛАЧХ (рис.7.16,а) позволяет выбрать
принципиальную электрическую схему
реализации (рис.7.16,б) и рассчитать
параметры её резисторов и конденсаторов
(см. Приложение
3 пункт 8).

а) б)
Рис7.16
Передаточная функция пассивного корректирующего устройства имеет общий вид:
![]() ,
(7.25) где
,
(7.25) где

Приравнивая правые части (7.24) и (7.25), можно рассчитать параметры резисторов и конденсаторов, входящих в пассивный 4-х полюсник (рис.7.16,б)