5.2. Сложение скоростей
Определим скорость абсолютного движения точки, если известны скорости относительного и переносного движений этой точки.
Теорема. Абсолютная скорость материальной точки равна геометрической сумме ее переносной и относительной скоростей
|
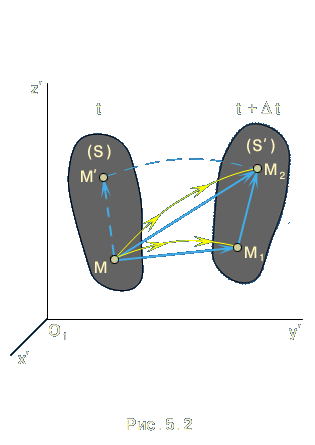
Рассмотрим
два близких положения подвижной системы
в момент времени
![]() и
и
![]() .
.
В
момент времени
точка
занимает положение M
.
В момент времени
![]() вследствие
относительного движения точка окажется
в положении
вследствие
относительного движения точка окажется
в положении
![]() ,
а за счет переносного движения за это
время точка переместится в положение
,
а за счет переносного движения за это
время точка переместится в положение
![]() (рис. 5.2)
. Перемещение точки в абсолютном,
относительном и переносном движениях
представляются соответственно векторами
(рис. 5.2)
. Перемещение точки в абсолютном,
относительном и переносном движениях
представляются соответственно векторами
![]() ,
,
![]() ,
,
![]() .
Вектор
равен
геометрической сумме векторов
и
.
Вектор
равен
геометрической сумме векторов
и
![]() :
:
![]() .
Средняя
абсолютная скорость точки M
за
время
.
Средняя
абсолютная скорость точки M
за
время
![]() ,
по определению, равна отношению вектора
перемещения ко времени
,
т.е.
,
по определению, равна отношению вектора
перемещения ко времени
,
т.е.
![]() .
Вектор
.
Вектор
![]() определяет
среднюю относительную скорость точки
в подвижной системе координат S
,
вектор
определяет
среднюю относительную скорость точки
в подвижной системе координат S
,
вектор
![]() представляет
среднюю скорость переносного движения,
поэтому равенство можно переписать в
виде
представляет
среднюю скорость переносного движения,
поэтому равенство можно переписать в
виде
![]() .
.
В
пределе при
![]() векторы
векторы
![]() ,
,
![]() и
и
![]() дают
значения мгновенных скоростей в
абсолютном, переносном и относительном
движениях, т.е.
.
Полученная
теорема имеет важное значение в механике.
дают
значения мгновенных скоростей в
абсолютном, переносном и относительном
движениях, т.е.
.
Полученная
теорема имеет важное значение в механике.
5.3. Абсолютная и относительная производная от вектора. Формула Бура
Установим зависимость между полной и относительной производными по времени вектора и величинами, характеризующими движение подвижной системы отсчета относительно неподвижной (рис. 5.3) . Для этого разложим вектор на составляющие, параллельные осям подвижной системы координат.
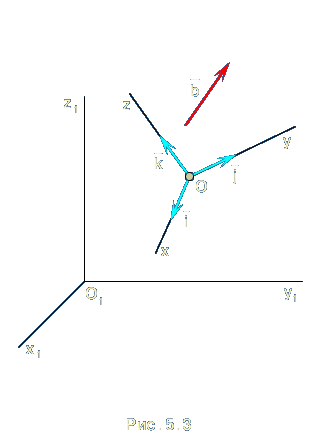
Имеем
|
(5.2) |
Изменение
вектора
относительно
неподвижной системы координат
,
,
,
в
зависимости от времени состоит из
изменения его проекций
![]() ,
,
![]() ,
,
![]() на
подвижные оси координат и изменения
единичных векторов
,
,
подвижных
осей, вследствие движения подвижной
системы координат относительно
неподвижной. Вычислим полную производную
по времени от вектора
,
используя формулу (5.2). Получим:
на
подвижные оси координат и изменения
единичных векторов
,
,
подвижных
осей, вследствие движения подвижной
системы координат относительно
неподвижной. Вычислим полную производную
по времени от вектора
,
используя формулу (5.2). Получим:
![]() .
Первые
три слагаемых учитывают изменение
вектора
при
неизменных
,
,
и
поэтому составляют относительную
производную, которую обозначают
.
Первые
три слагаемых учитывают изменение
вектора
при
неизменных
,
,
и
поэтому составляют относительную
производную, которую обозначают
![]() .
.
![]() .
Производные
по времени единичных векторов определим
по формулам Эйлера (лекция 3, формула
3.11)
.
Производные
по времени единичных векторов определим
по формулам Эйлера (лекция 3, формула
3.11)
![]() ,
тогда,
полная производная
,
тогда,
полная производная
|
(5.3) |

Полученная формула называется формулой Бура.
5.4. Сложение скоростей точки в общем случае переносного движения
Движение
подвижной системы координат относительно
неподвижной можно охарактеризовать
скоростью ее поступательного движения
,
например вместе с точкой O
и
вектором угловой скорости ее вращения
вокруг O
.
Пусть точка M
движется
относительно подвижной системы координат.
Получим теорему сложения скоростей.
Проведем векторы
![]() ,
характеризующие
положение точки M
относительно
неподвижной и подвижной систем осей
координат, и вектор
,
характеризующие
положение точки M
относительно
неподвижной и подвижной систем осей
координат, и вектор
![]() точки
O
(рис. 5.4)
.
точки
O
(рис. 5.4)
.
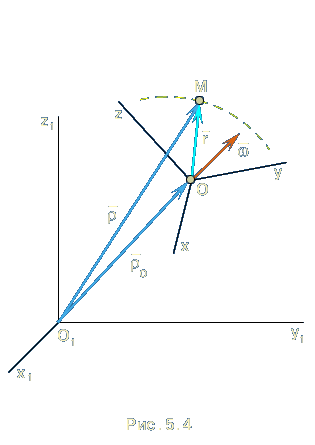
Тогда,
для любого момента
времени
![]() .
Продифференцируем
по времени это векторное тождество
.
Продифференцируем
по времени это векторное тождество
![]() .
По
определению
.
По
определению
![]() -
является абсолютной скоростью точки M
,
-
является абсолютной скоростью точки M
,
![]() -
абсолютная скорость точки O
. Для величины
-
абсолютная скорость точки O
. Для величины
![]() применим
формулу Бура (5.3). Имеем
применим
формулу Бура (5.3). Имеем
 .
Относительная
производная
.
Относительная
производная
![]() является
относительной скоростью точки M
по отношению к подвижной системе отсчета,
-
угловая скорость вращения подвижной
системы отсчета и, следовательно,
радиуса-вектора
,
если бы он в рассматриваемый момент
времени был скреплен с подвижной системой
осей координат. Таким образом, получаем
является
относительной скоростью точки M
по отношению к подвижной системе отсчета,
-
угловая скорость вращения подвижной
системы отсчета и, следовательно,
радиуса-вектора
,
если бы он в рассматриваемый момент
времени был скреплен с подвижной системой
осей координат. Таким образом, получаем
|
(5.4) |
Сравнивая
полученное выражение с (5.1), получаем,
что скорость
![]() является
скоростью точки свободного твердого
тела, скрепленного с подвижной системой
координат, с которой в данный момент
совпадает точка M
в движении тела относительно неподвижной
системы осей координат. Это и есть
переносная скорость точки M
, тогда:
является
скоростью точки свободного твердого
тела, скрепленного с подвижной системой
координат, с которой в данный момент
совпадает точка M
в движении тела относительно неподвижной
системы осей координат. Это и есть
переносная скорость точки M
, тогда:
|
(5.5) |
т.е. скорость абсолютного движения точки равна векторной сумме переносной и относительной скоростей.
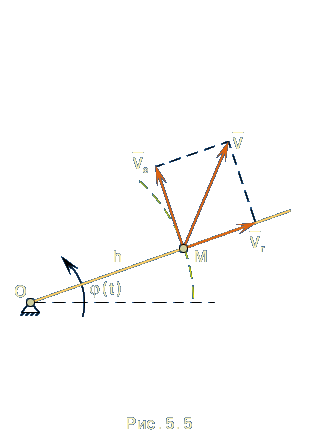
Пример.
Стержень
вращается в плоскости вокруг своего
неподвижного конца О с угловой скоростью
Решение Точка
участвует в двух движениях. Она
перемещается вместе со стержнем, и,
кроме того, движется вдоль стержня.
Относительно стержня точка совершает
прямолинейное движение со скоростью
V
,
поэтому, приняв за подвижную систему
стержень, значение относительной
скорости совпадает со скоростью ,
|