

7.6. Аналіз статичної характеристики об'єкту.
7.7. Типовая схема автоматизації кожухотрубного теплообмінника.
7.8. Типове вирішення автоматизації.
7.9. Схема парорідинного теплообмінника(з|із| агрегатним станом|станом| теплоносія, що змінюється).
7.10. Математичний опис на основі фізики процесу.
7.11.Тепловий баланс парорідинного теплообмінника.
7.12. Матеріальний баланс по рідкій фазі для міжтрубного простору|простір-час|.
7.13. Матеріальний баланс по паровій фазі для міжтрубного простору|простір-час|.
7.14. Інформаційна схема об'єкту.
53
7.15. Аналіз динамічних характеристик парорідинного теплообмінника як об'єкту управління температурою.
7.16. Аналіз статичної характеристики об'єкту.
7.1. Схема кожухотрубного теплообмінника з|із| агрегатним станом|станом| речовин, що не змінюється.
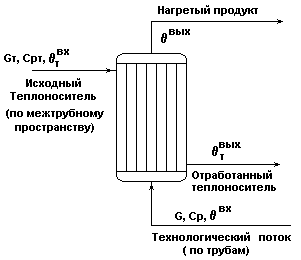
Рис.1.
Технологічний процес: нагрівання технологічного потоку G до температури θвых за допомогою теплоносія Gт з агрегатним станом, що не змінюється.
Показник ефективності: θвых.
Мета управління: : поддержание θвых= θзд.
54
7.2. Математичний опис на основі фізики процесу.
Рух теплоносіїв здійснюється протитечією при заданих θтвх, θтвых, θвых, θвх.
Рушійна сила процесу:
 (1)
(1)
де
![]() .
.
Теплове навантаження апарату:
 (2)
(2)
Q(дж/с) дозволяє визначити Gтэфф і Gэфф на основі теплових балансів:
![]() (3а)
(3а)
![]() (3б)
(3б)
![]()
![]() (4а)
(4а)
![]() (4б)
(4б)
Ефективний час перебування:
![]() .
(5)
.
(5)
7.3. Математичний опис на основі теплового балансу.
Рівняння динаміки:
![]() (6)
(6)
Рівняння
статики при
![]() :
:
![]() (7)
(7)
На
підставі (6) і (7)
можна
прийняти:![]() .
(8)
.
(8)
7.4. Інформаційна схема об'єкту.
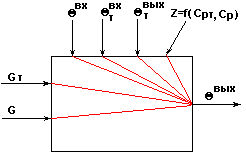
Рис.2.
55
Можливі дії, що управляють:
 .
.
Можливі контрольовані обурення|збурення|:
 .
.
Можливі неконтрольовані обурення|збурення|:
 .
.Можлива керована змінна:
 .
.
7.5. Анализ динамічних характеристик об'єкту.
Рівняння динаміки в нормалізованому вигляді|виді|.
 (9)
(9)
На
основі цього рівняння динаміки об'єкт
по каналу
![]() описується математичною моделлю
аперіодичної ланки 1-го порядку:
описується математичною моделлю
аперіодичної ланки 1-го порядку:
![]() (10)
(10)
де:
![]() ;
;
 .
.
Об'єкт має транспортне запізнювання:
![]() (11)
(11)
де Vтруб - об'єм трубопроводу від Р.О. до входу в апарат.
Таким чином, в цілому|загалом| динаміка об'єкту по каналу управління описується математичною моделлю аперіодичної ланки 1-го порядку|ладу| із|із| запізнюванням:
(12)