

§ 6. Скорость движения точки
Важной характеристикой движения точки является ее скорость. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий.
Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным.
Для равномерно-прямолинейного движения
Δ r = υΔ t,
где v – постоянный вектор.
Вектор v называется скоростью прямолинейного и равномерного движения полностью его определяет.
Из соотношения (11.10) видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени. Из (11.10) имеем
υ=
![]()
Направление вектора V указано на рис. 37. Перейдем к рассмотрению неравномерного криволинейного движения точки.
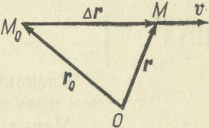
Пусть точка М произвольно движется по некоторой кривой. Пусть в момент t точка занимает положение М, а через весьма малый промежуток времени Δt она занимает положение М1. Положение точки М определяется радиусом-вектором г, а положение точки М1 — радиусом-вектором г+Δг, равномерное прямолинейное движение точки из М в М^ можно охарактеризовать скоростью, равной отношению Δг к Δt, называемой средней скоростью:
υCP= .
Вектор υCP совпадает с направлением вектора Δг.
Переходя к пределу в (11.12), получим скорость в данной точке или в данный момент времени
υ=![]() ,
,
или
υ=r
Здесь и далее производные по времени обозначаются по Ньютону, например, г и т. д.
Следовательно, скорость в данной точке равна первой производной по времени от радиуса-вектора точки.
Так как секущая в пределе переходит в касательную, то скорость в данной точке направлена по касательной к траектории в сторону возрастания дуг.
§ 7. Скорость точки в прямоугольной декартовой системе координат
Если движение точки задано координатным способом: х = х (t), у = у (t), z=z (t), то скорость точки определяется по ее проекциям на оси координат. Действительно, разложим вектор скорости и радиус-вектор г по ортам координатных осей (рис. 38). Получим
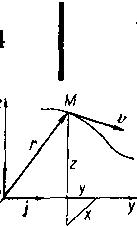
г = iх + jу + kz,
υ=iυX+jυY+kυZ ,
где х, y, z — координаты движущейся точки, υ х, υ y, υz — проекции скорости на оси координат. По определению скорости имеем
υ=r
Подставляя в эту формулу значения υ и г из (11.14), получим
iυX+jυY+kυZ= iх + jу + kz,
откуда
υX=x, υY=y, υZ=z
Следовательно, проекции скорости на оси координат равны первым производным по времени от соответствующих координат точки. Модуль скорости определяется по формуле
υ=![]() ,
,
или
υ=![]() .
.
Направление скорости определяется по направляющим косинусам:
cos(υ^i)=![]() ,
cos(υ^j)=
,
cos(υ^j)=![]() ,
cos(υ^k)=
,
cos(υ^k)=![]()
§ 9. Скорость точки в полярных координатах
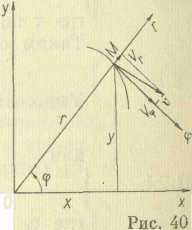
Если движение точки в плоскости Оху задано в полярных координатах: г = г (t); φ = φ (t), то, выражая декартовы координаты через полярные (рис. 40), получим х = r cos φ, y= r sinφ. Проекции скорости υ на оси декартовых координат будут
υ![]() =
x
= r
cos
φ
– r
sin
φ = υ
=
x
= r
cos
φ
– r
sin
φ = υ![]() cos
φ-
υ
φ
sin
φ,
cos
φ-
υ
φ
sin
φ,
υ![]() =
y=
r
sin
φ
+ rφ
cos
φ=
υ
sinφ
+ υ
=
y=
r
sin
φ
+ rφ
cos
φ=
υ
sinφ
+ υ![]() cos
φ,
cos
φ,
где υ = г — проекция скорости на радиальное направление r, υ = rφ — проекция скорости на трансверсальное направление φ. Модуль скорости
υ=
![]() r2+
r2φ2
r2+
r2φ2