

2. Описание лабораторных устройств
На лабораторном полигоне представлены плакаты с изображением специальных частей контактных сетей и их натуральные образцы. Управляемая стрелка установлена на специальном стенде. Схема питания электромагнитного привода стрелки приведена на рис. 5.
3. Программа работ
3.1. Изучение и изображение схемы управляемой стрелки УСУ-74.
3.2. Исследование электромагнитного привода на стенде.
Кинематическая схема привода представлена на рис. 6. Здесь пружина 3 имеет предварительную закрутку, вследствие чего перо 1 четко возвращается в исходное положение "направо". При протекании тока по обмотке электромагнита на рычаг 7 действует сила Р, преодолевающая момент пружины и силы трения в опорных точках и создающая ускорение перу. Величина тока должна быть такой, чтобы обеспечивался четкий перевод пера. Величина момента, создаваемого закручиванием пружины:
![]() ,
(1)
,
(1)
где - угол закрутки в радианах; Е=(1,82,2)*105 - модуль упругости стальной проволоки, Н/мм2 ; IX- момент инерции сечения витка, мм4; N- число витков пружины.
Для проволоки диаметром d:
![]() ,
(2)
,
(2)
тогда формула (1) с учетом формулы (2) преобразуется:
![]() .
(3)
.
(3)
Выражение в скобках (3) есть характеристика пружины на кручение. Обозначив его через С, можно записать:
![]() (4)
(4)
Величина нагружающего усилия Р, преодолевающего момент пружины, зависит от тока I. Зависимость Р(І) определить экспериментальным путем в следующей последовательности:
-измерить параметры пружины d, D, N и по (3) найти С;
-задать различные значения и по (4) вычислить момент М, построить график М(); .
- установить пружину в приводе, задавая различные значения угла закрутки пружины;
- измерить на стенде величину тока, при которой перо четко переходит налево, построить график зависимости (I), M(I);
- измерить плечо а приложения силы Р (см. рис. 5) и, используя графики (I), M(I), разделив М на а, получить зависимость Р(І), построить ее график.
Операция однократного срабатывания привода должна быть проведена за время не более ЗО с. В противном случае схема принудительно примет исходное положение. Для каждого угла закрутки опыт с оценкой тока І повторяется два - три раза, в расчет принимают среднее его значение .В опытах ток через обмотку электромагнита не должен превышать 100 А.

Рис. 5 - Схема установки для испытаний электромагнитного привода:
SF1, SF2 – выключатель автоматический; КМ – пускатель магнитный; ТРН - тиристорный регулятор напряжения; Т - трансформатор; UZ –мост выпрямительный; УА1, УА2 - стрелочный электромагнит; РА - амперметр с шунтом RS; SB1, SB2 – выключатель кнопочный (включения и отключения); КМ:1, КМ:2 – контакт вспомогательный магнитного пускателя; КТ - реле времени; КL - реле промежуточное; SQ1, SQ2 –выключатель конечный, управляемый электромагнитом; НL - лампы сигнальные.
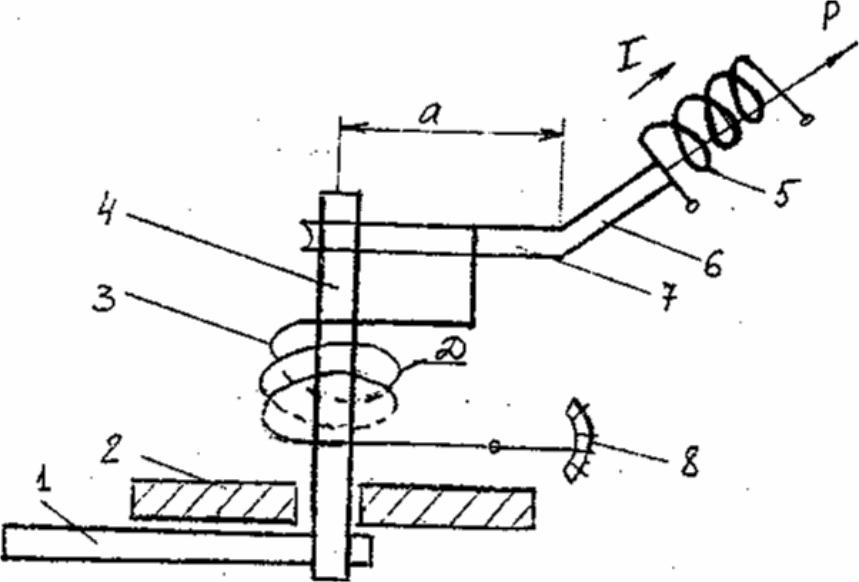
Рис. 6 - Кинематическая схема привода стрелки: 1 - перо; 2 - корпус; 3 - пружина; 4- ось; 5- электромагнит; 6- поводок; 7- рычаг; 8- регулировочный сектор
Привод стрелки УСУ-74 должен четко срабатывать при токе электромагнита 40 А. При наличии зависимости Р(І) для I=40 А можно выбрать характеристику пружины и угол ее закрутки. Решение по оценке М,Р и для двух пружин при I = 40 А показать на графиках.