

Матрица перемещения.
Для распространения лучей, проходящих слева направо путь t между двумя опорными плоскостями, можно записать:
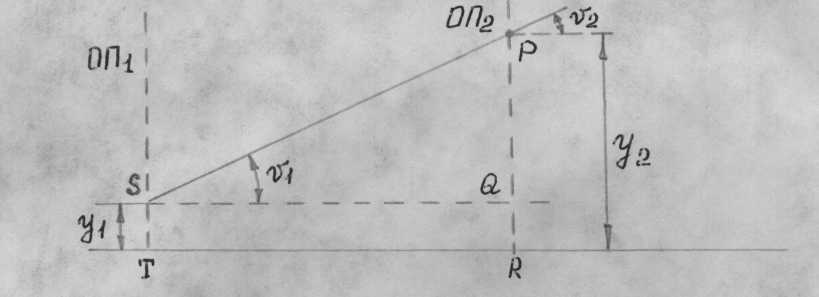

Матрица перемещения предназначена для операций с такими параметрами луча, как высота луча и оптический направляющий косинус, а не просто его угол. Таким образом, если n - показатель преломления среды между ОП1 и OП2, то приведенное выше уравнение нужно переписать в виде
![]()
где Т = t/n - приведенная толщина оптического промежутка. Нетрудно заметить, что “V1” и “V2” равны друг другу. Следовательно, для нового оптического направляющего косинуса можно написать уравнение
![]()
Полученные два уравнения теперь можно записать в матричной форме:

Таким образом, перемещение луча вправо описывается матрицей
Матрица преломления.
Рассмотрим, как действует на распространение лучей кривая поверхность, разделяющая две области с показателями преломления n1 и n2. Радиус кривизны поверхности считается положительным, когда центр кривизны расположен справа от поверхности.
На рисунке приведена поверхность положительной кривизны:
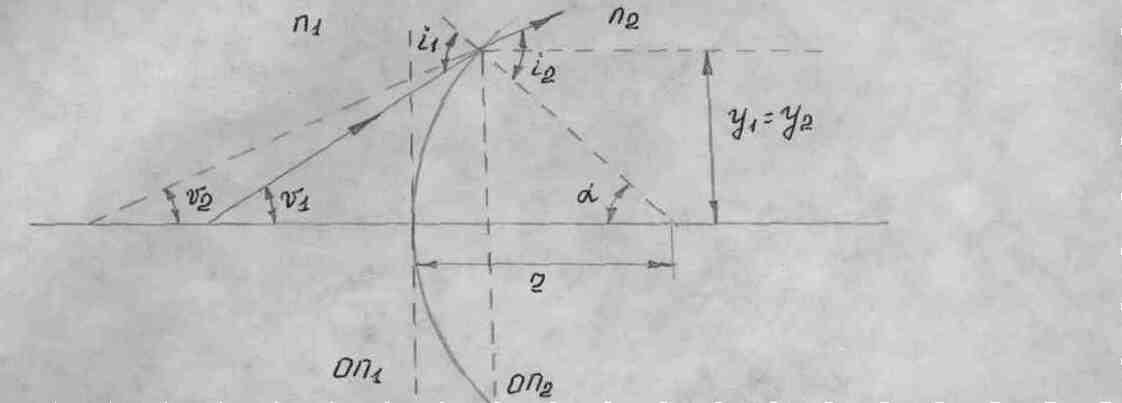
В случае параксиальных лучей расстояние между плоскостями ОП1, ОП2 пренебрежимо мало. Отсюда имеем y2 = y1. Применяя закон Снеллиуса можно написать
n1 Sin i1 = n2 Sin i2
или в параксиальном приближении
n1 i1 = n2 i2
По теореме о внешнем угле треугольника
i1 = V1 + = V1 + y1/r
i2 = V2 + = V2 + y1/r
Следовательно
n1(V1 + y1/r) = n2(V2 + y1/r)
или
V1 + n1.y1/r = V2 + n2 .y1/r
Таким образом, переписывая эти уравнения в матричной форме, окончательно получаем

Величину (n2 – n1)/r обычно называют оптической силой поверхности Ф.
Получили матрицу преломления:
![]()
РАСЧЕТ ПАРАМЕТРОВ ВЫХОДНОГО ЛУЧА ПО ЗАДАННЫМ ПАРАМЕТРАМ ВХОДНОГО ЛУЧА
Если
обозначить вектор луча
![]() ,
проходящего через r-ую
опорную плоскость, как Кr,
то для преобразования параметров луча
из ОПr
в ОП(r+1)
можно
написать следующее рекуррентное
соотношение:
,
проходящего через r-ую
опорную плоскость, как Кr,
то для преобразования параметров луча
из ОПr
в ОП(r+1)
можно
написать следующее рекуррентное
соотношение:
К(r+1) = Mr Кr;
аналогично
Кr = M(r-1).К(r-1)
и так далее.
Используя повторно это рекуррентное соотношение, а также ассоциативное свойство умножения матриц, находим
K(2n+2) = M(2n+1) K(2n+1) = M(2n+1) (M2n K2n) = (M(2n+1) M2n)( M(2n-1) K(2n-1)) =
= (M(2n+1) M2n M(2n-1) M(2n-2)…M3M2M1)K1.
Следовательно, K(2n+2) = MK1, где М представляет собой произведение всех матриц, взятых в нисходящем порядке номеров.
Используем теперь R-матрицу для описания действия отражающих поверхностей.
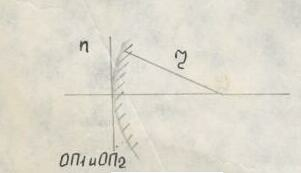
Чтобы вычислить оптическую силу Ф отражающей кривой поверхности, преобразуем формулу P = (n2 – n1)/2, заменив в ней показатель преломления n2 второй среды на отрицательное значение показателя преломления n той же среды, в которую погружен отражатель и в которой распространяется луч после своего отражения. Таким образом получим Р = - 2n/r и R - матрица запишется в виде

В результате всех вычислений должны получить результирующую матрицу, вида

Элементы Аp, Вp, Сp, Dp матрицы имеют вполне определенный смысл. Их значения характеризуют свойства системы. Для уяснения смысла коэффициентов матрицы преобразования лучей оптической системой можно поступить следующим образом: предположить, что коэффициенты равны нулю и выяснить, к чему это приведет.

Это значит, что все лучи идущие из одной и той же входной опорной плоскости ОП1, выходят из выходной опорной плоскости под одним и тем же углом V2 = Cp y1 к оси системы (т.е. в виде параллельного пучка) независимо от того, под каким углом V1 эти лучи входили в систему. Отсюда следует, что входная плоскость ОП1 должна быть передней фокальной плоскостью системы.
2. Вp = 0, тогда y2 = Ap y1 + 0V1 = Ap y1. Это означает, что все лучи проходящие через точку О1(с координатой y1) плоскости ОП1 пройдут через одну и ту же точку О2 (с координатой y2) плоскости ОП2. Следовательно, точки О1 и О2 являются соответственно точкой-предметом и точкой- изображением плоскостей ОП1 и ОП2.
3. Сp = 0, тогда V2 = Dp V1. Это означает, что параллельный пучок лучей, вошедших в оптическую систему, выйдет из нее также в вице параллельного пучка, т.е. данная оптическая система является афокальной.
4. Аp = 0, тогда y2 = Bp V1. Это значит, что лучи, входящие в систему в виде параллельного пучка лучей, в выходной плоскости ОП2 пройдут через одну и ту же точку. Следовательно, в этом случае плоскость ОП2 является задней фокальной плоскостью оптической системы.
При расчетах чаще всего используют "приведенные значения" (в отношении к показателю преломляющей среды). Использование приведенных значений дает следующее преимущество: при пересечении плоской границы раздела двух сред приведенные значения не изменяются.