

6.4. Субблок контура регулирования сб2
Субблок автоматически контролирует величину параметра. Собран из элементов системы КЭМП.
Границы отклонений параметров устанавливаются повторителями со сдвигом по давлению. Диапазоны настройки уровней обнаружения отклонений параметров относительно номинала + 2% до + 15% унифицированного диапазона.
Величину номинала, верхнее и нижнее отклонения можно контролировать на клеммах вызова.
Компаратор (сумматор) сравнивают величину параметра и установленные границы. Если параметр находиться внутри границ, установленных относительно номинала, то выходы СО на индикаторы и звуковую сигнализацию равны 0. Если параметр выходит за пределы границ, то эти выходы становятся раны 1. Выходной сигнал формируется на пневмореле, включенном по схеме ИЛИ.
Появление отклонения отмечается мерцающим светом по сигналу «Пульс» от СБЗО и сигналом ОЗС на звуковой сигнализатор. Таким образом, СО будет пульсирующим.
Субблок состоит из двух узлов:
-анализатора;
-сигнализации.![]()
Анализатор вырабатывает
сигналы при П >Н +
![]() -когда
параметр выходит за верхнюю границу;
-когда
параметр выходит за верхнюю границу;
при Н >П +
![]() -когда
параметр выходит за нижнюю границу.
-когда
параметр выходит за нижнюю границу.
Анализатор реализуется на пневмореле и повторителях со сдвигом и и элементах ИЛИ. Появляющиеся отклонения используются для показания отклонений на пневмоиндикаторах на мнемосхеме. Кроме того, они поступают на узел сигнализации, где вырабатываются электрические сигналы отклонения.
При возникновении отклонения лампа будет сигнализировать пульсирующим светом (сигнал СО), привлекая внимание оператора, пока он не нажмет на пульте кнопку квитирования, от которой поступает сигнал Квит. При этом произойдет замена пульсирующего света на ровный.
Узел сигнализации реализуется с помощью триггера, взводящегося по сигналу Квит при наличии отклонения, пневмореле, включенного по схеме ИЛИ и пневмоэлектропреобразователей
При наличии отклонения и нажатии кнопки квитирования выходной сигнал триггера равен 1. При этом начинает работать генератор импульсов, выход которого идет на пневмоэлектропреобразователь для формирования пульсирующего электрического сигнала. Сигналы подаются на соответствующие электрические лампочки.
Когда значение параметра входит в установленные границы, триггер выключается, выход равен 0.
Пневмоэлектропреобразователи устанавливаются в исходное положение.
Такая форма представления отклонений позволяет оператору отличать вновь появившиеся отклонения от предыдущих, переведенных кнопкой квитирования на равное свечение.
Звуковой сигнал ОЗС действует с момента возникновения отклонения до квитирования сигнала.
6.5 Субблок управления программным задатчиком -СБ27
Субблок предназначен для управления двумя программными задатчиками.
Переключателем устанавливается режим, по которому выдерживается время изотермы
-по времени;
-по сигнализатору прочности.
Программный задатчик отключается от:
-сигнала цикл окончен ЦО;
-при нижнем отклонении параметра СП;
-при отсутствии сигнала включения контура ВКЛ;
-от сигнализатора прочности бетона.
В субблоке СБ 27 формируется дополнительный сигнал ОТКЛ на отключение регулятора подачи пара в период охлаждения и отключения контура.
Предусмотрена возможность ручного опробования работы ИМ при выключенном контуре.
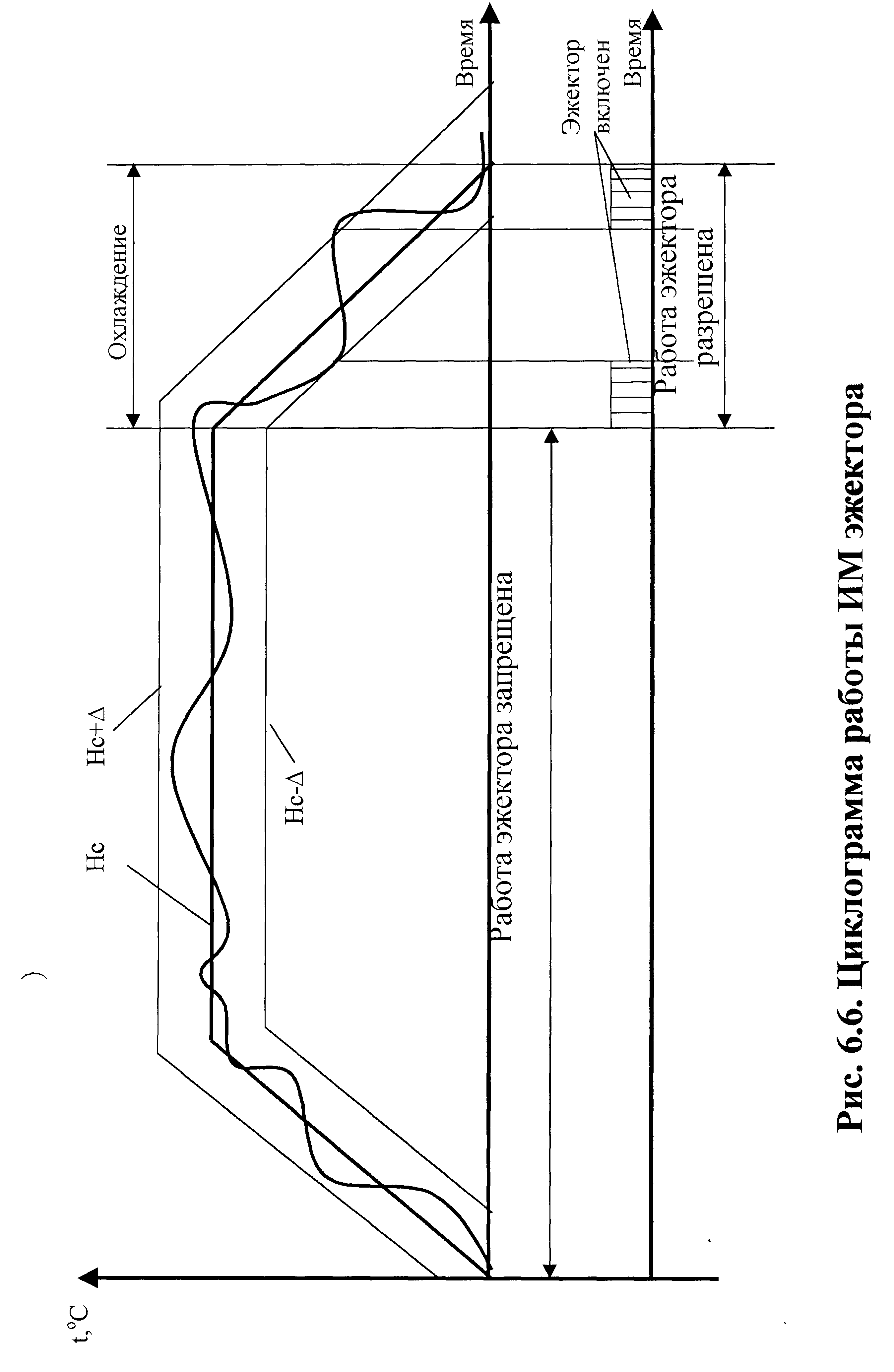
6.6 Субблок управления эжектором - СБ 28
До начала охлаждения работа эжектора запрещена.
Начало охлаждения формируется кулачком программного задатчика либо сигнализатором прочности. В этот момент включается эжектор и начинается охлаждение. Если температура станет меньше нижнего уровня сигнализации, то эжектор отключается. Если температура станет больше, чем верхний уровень сигнализации, эжектор включается.
Субблок СБ 28 предназначен для управления двумя эжекторами.
Субблок принимает исходное положение от сигнала Вкл (включено) при появлении Кл1 от программного задатчика. Формируется сигнал ОХЛ 1, который сохраняется до конца цикла и исчезает после отключения оператором тумблера ВКЛ.
Сигнал ОХЛ может в элементах
прерываться сигналами СН и ЦО, (наличие
нижнего отклонения параметра П<Н-![]() или цикл окончен).
или цикл окончен).
При наличие сигнала «ОХЛ» формируется выходной сигнал Э на включение ИМ эжектора. Регулированием емкости и дросселя в схеме обеспечивается выдержка времени включения вентилятора на время открытия вентиляционных окон. Одновременно формируется электрический сигнал ВВ на включение вентилятора.
Сигнал Э на эжектор исчезает при наличии сигнала СН и не включится при исчезновении нижнего отклонения, а появиться только при наличие верхнего отклонения, П>Н.
Контур собран на триггерах.
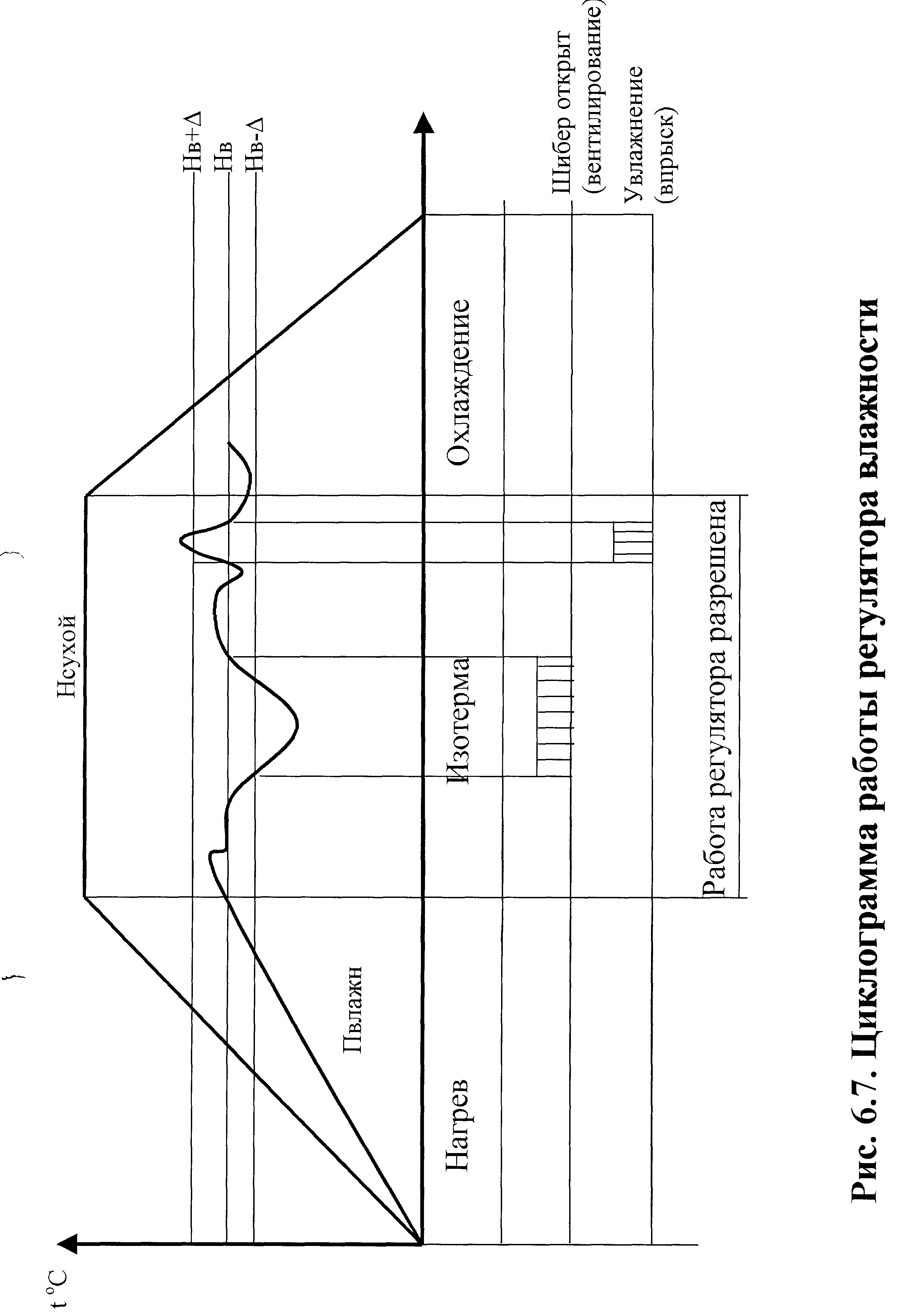
6.7. Субблок позиционного регулятора влажности - СБ 29
Работа разрешена только на изотермическом участке цикла. Во время нагрева и охлаждения работа регулятора влажности запрещена.
Регулятор включается по сигналу мокрого термометра в момент равенства сигнала параметра и установленного значения номинала, т.е.
П вл = Н вл
Параметр Пвл должен находиться внутри зоны, ограниченной отключением
Н вл - 2
Н вл +
Если П вл < Н вл - 2, т.е. увеличилась влажность, то открывается шибер, который будет открыт до тех пор, пока Пвл = Н вл. Если П вл > Н вл + т.е. влажность уменьшилась, то подается сигнал на увлажнение.
Субблок предназначен для регулирования влажности по двум каналам.
Субблок собран из унифицированных элементов - триггеров, повторителей, клапанов.
Сумматор (элемент сравнения) производит сравнение сигналов П, Н.
При П вл = Н вл сигнал равен «1», он взводит триггер, который разрешает работу ИМ на увлажнение или открытие шибера.
Граница параметра (Н вл + а!), (Н вл - Д2) устанавливается повторителем со сдвигом по давлению на величины аь А2.
Элемент сравнения вырабатывает сигнал «1», если
Пвл>Нвл + .
Затем соответствующий триггер выдает сигнал на увлажнение. Аналогично сигнал равен «О», если П вл<Н вл, тогда увлажнение прекращается.
Другой аналогичный элемент сравнения сравнивает П вл с границей (Н вл - 2). Аналогично триггеры дают или снимают сигнал на открытие шибера.
Субблок предусматривает вызов сигналов контура регулирования влажности на показывающие приборы и манометры по сигналам вызова.
6.8. Субблок преобразователей –СБ 30
Субблок содержит элементы:
-преобразующие электрический сигнал от сигнализатора
прочности в пневматический сигнал ДП 1;
-девять элементов для преобразования сигналов:
на включение вентилятора;
на ИМ увлажнения;
на ИМ шибера.
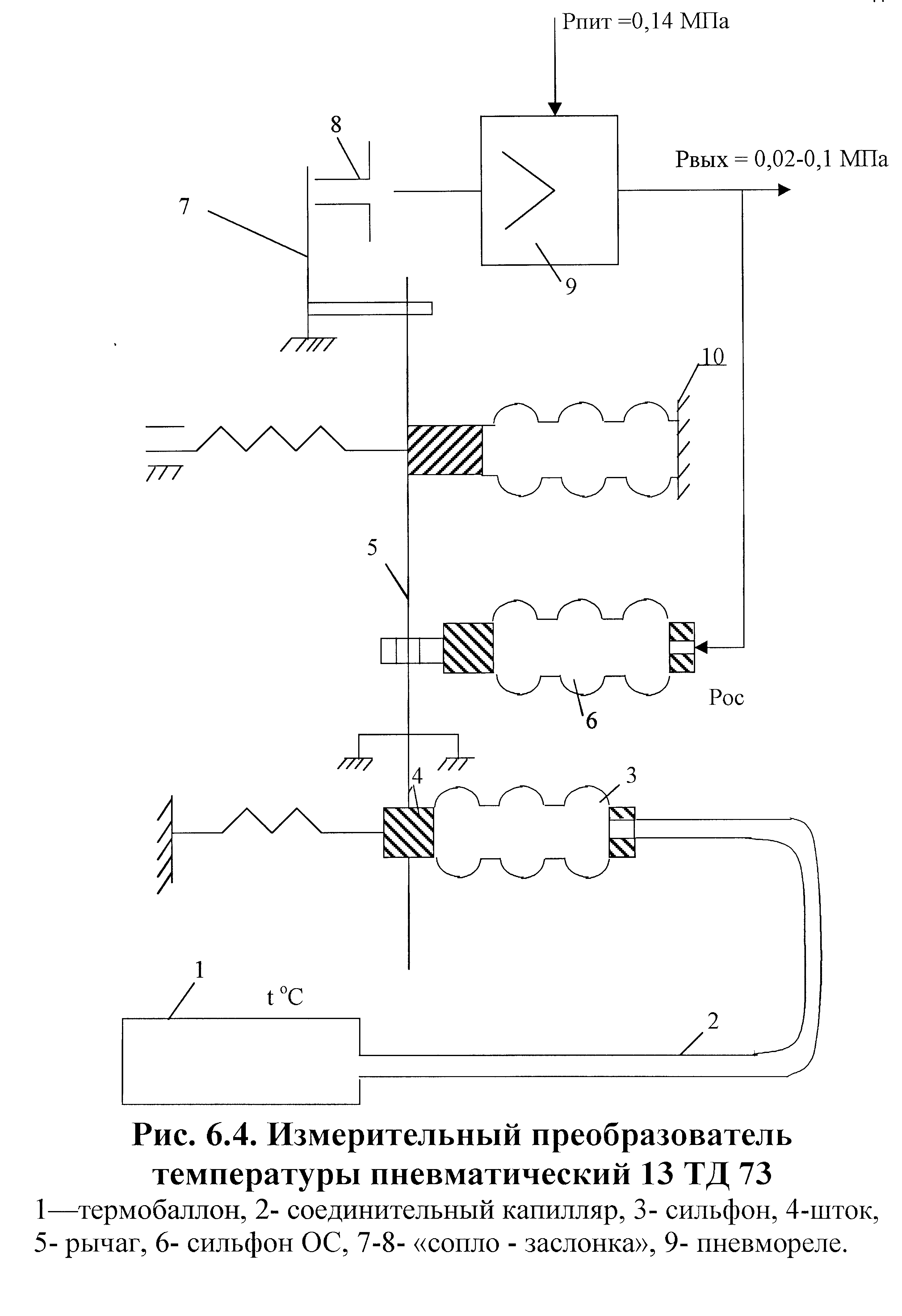
6.9. Измерительный преобразователь температуры 13ТД73(рис. 6.4)
Преобразователь газовый с пневматическим выходным сигналом.
Техническая характеристика
Класс точности 0,6; 1,0; 1,5.
Предел измерения 0-100°С; 0-300°С; 0-150°С.
Длинна измерительного капилляра, м 1,6; 2,5; 4.
Погружение термобаллона, мм 200; 250; 315; 400.
Термобаллон (d, длина) d=20мм L=160; 125.
Газ – гелий, аргон.
Соединительный капилляр — латунная трубка 2,5x0,35 мм, защищенная полиэтиленой оболочкой (L=1,6; 2,5; 4,0 м).
Термобаллон выполнен из стали 12ХЦН10Т.
Чувствительный элемент давления выполнен в виде сильфона, усилие последнего компенсируется пневматическим преобразователем.
Прибор бесшкальный, преобразует измеряемую температуру в унифицированный пневматический сигнал.
6.10. Задатчик пневматический программный П31.2ЭА (рис. 6.5)
Задатчик типа П31.2ЭА предназначен для автоматического изменения по заданной программе номинального значения выходного сигнала в стандартном диапазоне 0,2-1,0 кгс/см 2.
Технические данные
Рабочий диапазон изменения
выходного сигнала 0,2 – 1,0 кгс/см2
Погрешность отработки
выходного сигнала ±1%
Питание системы сжатым
воздухом давления 1,4 ±10%кгс/см2
Потребляемая мощность 4 ва
Частота вращения программного
Диска, об/сутки 1;2;3;4;6;12;24;95.
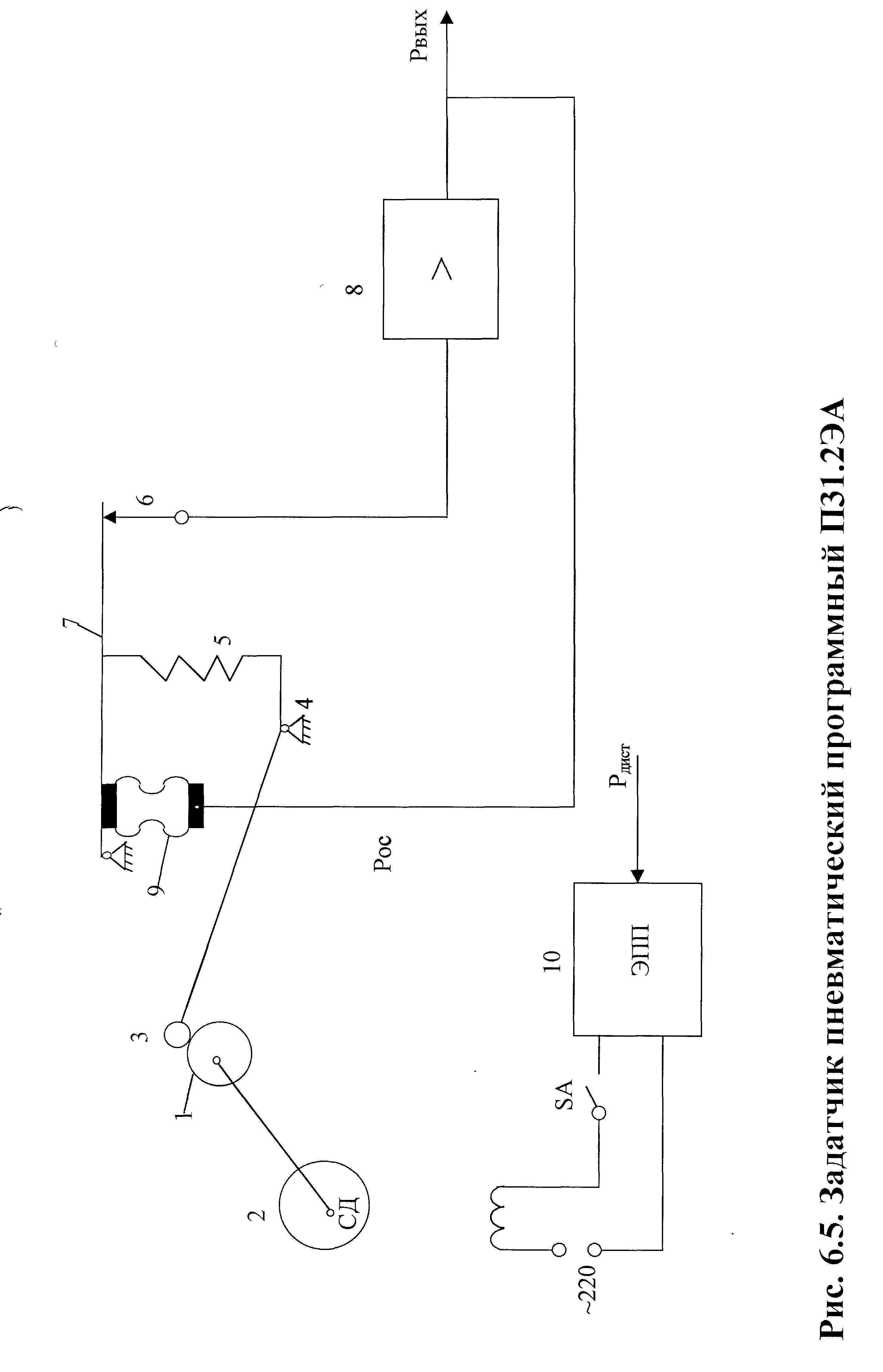
Принцип действия основан на преобразовании линейных перемещений в пропорциональный пневматический сигнал.
Программный диск 1 выполнен определенной формы и вращается от синхронного двигателя 2 через редуктор с нужной скоростью.
По ребру программного диска перемешается ролик 3. Через рычаг 4 перемещение ролика вызывает изменение натяжения пружины 5, что в свою очередь вызывает изменение зазора в системе «сопло-заслонка» 6. Заслонкой является конец рычага 7. К соплу подводиться Р пит.=1,4 кг/см2 . Изменение зазора в «сопле-заслонке» приводит к изменению давления сжатого воздуха в линии сопла. Таким образом, существует прямая зависимость между перемещением ролика по ребру программного диска и величиной пневматического выходного сигнала.
Полученный пропорциональный пневматический сигнал усиливается пневматическим усилителем 8 и поступает на выход задатчика и на сильфон обратной связи 9, который развивает на рычаге 7 уравновешивающий момент.
Включение задатчика производиться электрическим тумблером SА.
Остановка программного диска в любой точке осуществляется либо электрическим тумблером SА вручную, либо подачей дистанционной команды «Стоп», которая поступает в камеру электропневматического преобразователя 10 и разрывает цепь питания СД.
Задатчик обеспечивает пневматическую сигнализацию двух любых точек программы. Для этого применены пневмореле.
6.11. Прибор контроля пневматический самопишущий типа РПВ 4.3 (рис. 6.5)
Прибор типа РПВ 4.3 предназначен для контроля, непрерывной записи на ленточной диаграмме двух параметров и показания одного из них по шкале. Выходной сигнал пневматический в диапазоне от 0,2 до 1,0 кгс/см 2.
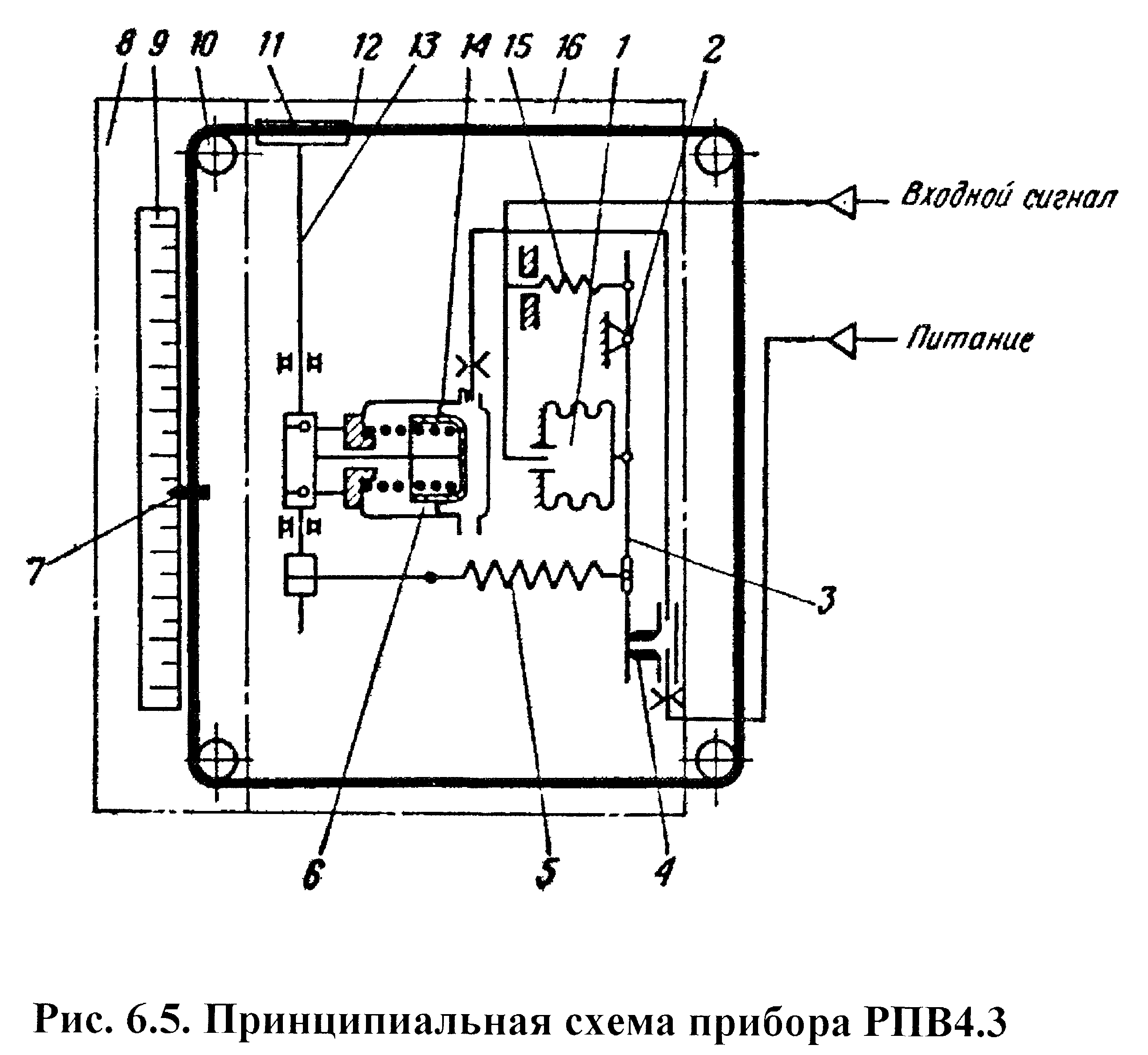
1- Сильфон
2- Опора
3- Рычаг
4- Шариковое сопло
5- Пружина обратной связи
6 – цилиндр
7 – Показывающая стрелка
9 – Шкала
11 – Шкив
13 – Выходной вал
14 – Манжетная мембрана
15 – Удерживающая пружина
Приборы применяются в схемах автоматического контроля технологических параметров, а именно: давления, разрежения, перепада давления, расхода, уровня, температуры, состава и свойств веществ.
Принцип действия измерительного механизма прибора основан на методе силовой компенсации, при которой момент развиваемый чувствительным элементом, уравновешивается моментом пружины обратной связи. Принципиальная схема прибора дана рис.6.5.
Входной сигнал сжатого воздуха поступает в сильфон 1. Усилие, развиваемое сильфоном, передается на рычаг 3, который, поворачиваясь на упругой опоре 2, перекрывает шариковое сопло 4 пропорционально величине входного сигнала.
Изменение входного сигнала вызывает изменение зазора между соплом и рычагом, что приводит к изменению давления в линии сопла, а, следовательно, и в полости цилиндра 6.
Изменение давления в цилиндре вызывает перемещение поршня, уплотненного манжетной мембраной 14. Поступательное движение поршня с помощью ленточной передачи преобразуется во вращательное движение выходного вала 13, на котором жестко закреплен шкив 11, приводящий в движение посредством тросика каретку с пером и стрелкой. Поршень перемешается, поворачивая выходной вал и меняя натяжение пружины обратной связи 5 до тех пор, пока момент , создаваемый натяжением пружины, не уравновесит момент, создаваемый сильфоном. Новому состоянию равновесия соответствует новое положение стрелки прибора.
Прибор состоит из следующих основных узлов:
-измерительного механизма;
-лентопротяжного механизма;
-редуктора с электродвигателем;
-механизма перемещения каретки с пером и стрелкой;
-распределителя;
-шасси;
-корпуса.
Прибор имеет два измерительных механизма.