

М ИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Институт Природных Ресурсов
Кафедра Химической технологии топлива и химической кибернетики
Лабораторная работа №2
Исследование звена второго порядка
Выполнил студент группы 5А91
М. С. Широкова
Проверил доцент кафедры ХТТ
Е. А. Кузьменко
Томск 2013
Цель работы
1.Ознакомиться с методикой исследования звена второго порядка.
2.Получить практические навыки исследования звена второго порядка с помощью ЭВМ.
2.Исходные данные
Коб. = 1,5
Т1 = 100
T2 = 15
Для T1/T2 = 2; Т1 = 30, T2 = 15;
Для T1/T2 < 2; Т1 = 7,5, T2 = 15;
Для T1/T2 = 0; Т1 = 0, T2 = 15.
3.Теоретическая часть
Технологический процесс, при протекании которого производится максимальное или определенное количество продукта с заданными свойствами при минимальных затратах сырья или энергии, является оптимальным. Чтобы обеспечить оптимальные условия процесса, им надо управлять. В общем случае различают управляющие воздействия (Х) – параметры, с помощью которых можно влиять на объект управления, и управляемые величины (У) – параметры, на которые влияют управляющие воздействия (рис. 1).

Рис. 1. Схема объекта управления
Для химических процессов под управлением понимают такое целенаправленное изменение управляющих воздействий, которое обеспечивает оптимальные условия проведения процесса.
Различают 3 вида управления:
Регулирование – разновидность управления, при котором цель достигается за счет стабилизации управляемых параметров.
Автоматическое программное управление – цель управления достигается за счет изменения управляющих параметров по определенной программе.
Следящее управление – цель управления достигается за счет поддержания управляемых параметров в малой окрестности других независимых параметров.
В общем случае различают разомкнутую и замкнутую системы регулирования. В химическом производстве свойства объекта постоянно меняются и заложить их в автоматический регулятор нельзя, поэтому в химической промышленности разомкнутые системы регулирования не применяются.
В замкнутых системах регулирования используются регулирование по отклонению и регулирование по возмущению.
Регулирование по отклонению. Системы регулирования по отклонению (рис 2) имеют обратную связь, с помощью которой передается информация о выходных параметрах на элемент сравнения. Элемент сравнения формирует сигнал рассогласования (=u-y), который поступает в автоматический регулятор. Таким образом, при регулировании по отклонению информация на регулятор поступает в виде отклонения.
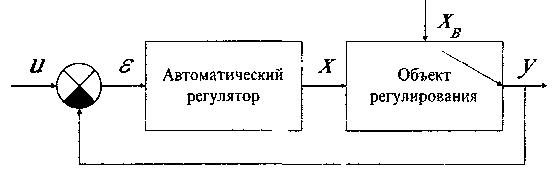
Рис 2 Схема замкнутой системы регулирования по отклонению
Регулирование по возмущению. Регулирование по возмущению используется в случае, когда на ход технологического процесса оказывают влияние внешние воздействия, которые изменяются произвольно и независимо от технологического процесса Для упреждения влияния возмущающего параметра на объект строится система регулирования (рис 3), в которой величина возмущающего сигнала сравнивается с номинальным значением, и ошибка рассогласования подается на регулятор Однако данная система не лишена недостатков:
отсутствует информация о результатах воздействия,
необходимо строить столько систем регулирования, сколько существует возмущений.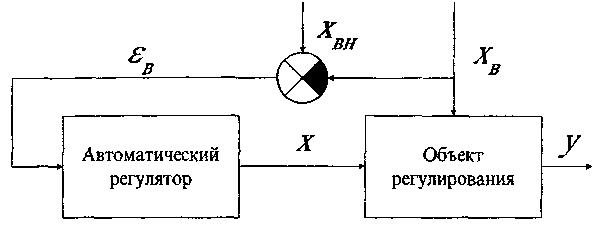
Рис. 3. Схема упреждения влияния возмущающего параметра на объект
Изменение выходного сигнала от момента приложения входного сигнала до установления стационарного состояния называется переходным процессом. Различают два вида переходных процесса: колебательный и апериодический. Для обеспечения работоспособности системы необходимо обеспечить качество переходных процессов.
В общем случае можно сформулировать две задачи управления:
Если на вход системы (рис.4) подан управляющий сигнал (канал управления), то система должна воспроизвести его с максимально возможной точностью, определяемой динамическими свойствами системы.

Рис.4 Схема одноконтурной АСР 6
Абсолютное число систем относится к классу колебательных, поэтому переходные процессы в системе имеют вид, представленный на рис. 5.
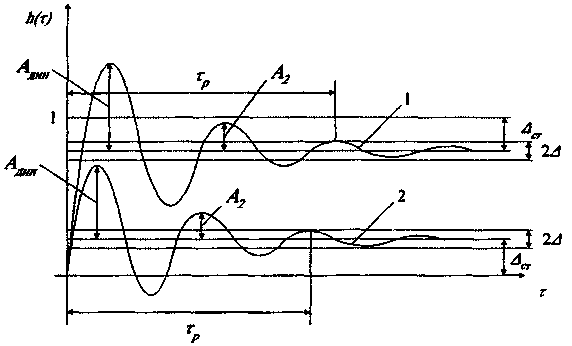
Рис 5 Колебательные переходные процессы в АСР