Обчислення вагових коефіцієнтів високочастотного, смугового і режекторного фільтрів
Вагові коефіцієнти високочастотного (ФВЧ), смугового (СФ) та режекторного (РФ) фільтрів можна обчислити на основі підсумування спектральних перетворень [1, 26].
В ведемо
поняття всечастотного (ВФ) фільтра, який
пропускає, не послаблюючи, усі частоти.
Рівняння такого фільтра має вигляд
ведемо
поняття всечастотного (ВФ) фільтра, який
пропускає, не послаблюючи, усі частоти.
Рівняння такого фільтра має вигляд
а його ваговий коефіцієнт
Отже, ВФ фільтр має лише один коефіцієнт а0=1. На основі цього можна стверджувати: якщо від спектра ВФ фільтра відняти спектр ФНЧ, то отримаємо спектр ФВЧ із тією самою граничною частотою (рис. 1.4). Це означає, що вагові коефіцієнти ФВЧ можуть бути обчислені як
![]() (1.11)
(1.11)

Рис. 6.4. Формування передаточної функції ФВЧ фільтра з
передаточних функцій ВФ та ФНЧ фільтрів
Вагові коефіцієнти смугового фільтра визначають так. За основу беремо ФНЧ2 з граничною частотою щ, яка відповідатиме верхній частоті смугового фільтра. Від спектра ФНЧ2 віднімаємо спектр іншого ФНЧХ, гранична частота ω1 якого є меншою. В результаті отримаємо спектр смугового фільтра із зоною попускання між ω1 і ω2 (Рис. 1.5).
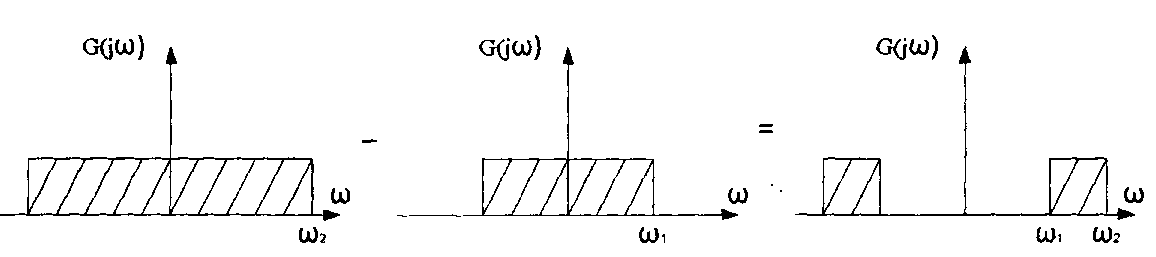
Рис. 6.5. Формування передаточної функції СФ фільтра з
передаточних функцій ФНЧ2 та ФНЧ± фільтрів
Вагові коефіцієнти смугового СФ фільтра знаходять так
![]() (1.12)
(1.12)
Обчислюють вагові коефіцієнти режекторного РФ фільтра, віднімаючи від спектра ВФ фільтра спектр СФ фільтра (рис. 1.6).

Рис. 6.6. Формування передаточної функції РФ фільтра
з передаточних функцій ВФ та СФ фільтрів
Вагові
коефіцієнти режекторного
РФ фільтра
визначають за формулою![]() (1.13)
(1.13)
Рекурсивні цифрові фільтри
У загальному випадку вихідний сигнал ЦФ у момент часу t = nT визначають значенням вхідного сигналу х у цей самий момент часу, а також значеннями вхідних і вихідних сигналів у попередні моменти часу, тобто [26]
![]()
Якщо ця залежність є лінійною, то цифровий фільтр називається лінійним, а вихідна величина уп визначається:
![]() (1.14)
(1.14)
або в загальному випадку
 (1.15)
(1.15)
Більше з двох чисел М і L вказує на порядок фільтра.
Очевидно, єдиним обмеженням фізичної реалізації різницевого рівняння є неможливість одержання якого-небудь з доданків правої частини, оскільки відповідний доданок ще не з’явився і не може бути отриманий його запам’ятовуванням з метою затримки на задану кількість періодів квантування. Отже, ЦФ може бути фізично реалізованим, якщо в праву частину рівняння входять поточні і минулі значення вхідної величини, але не входять майбутні значення.
Лінійний дискретний фільтр звичайно описують за допомогою передаточної функції, під якою розуміють відношення Z -перетворення вихідної величини до Z -перетворення вхідної величини. Таке перетворення ставить у відповідність дискретному залежному від часу сигналу х(пTа) функцію X(z) комплексної змінної z. У цьому випадку подання передаточної функції розглядатися не буде, однак використається одна з важливих властивостей Z - перетворення, яка пов’язана з тим, що при Z -перетворенні множення на Z-1 спричиняє затримку сигналу на величину періоду дискретизації Та. Ця властивість буде використана під час побудови блок-схеми ЦФ. Вхідні величини, починаючи з xn+N, затримуються кожна на величину періоду дискретизації Та до початкового значення xn-N. Кожна величина перемножується на відповідний коефіцієнт фільтра аk. Добутки підсумовують для утворення вихідної величини уп.
Отже, з рівняння (1.14) видно, що для одержання уп необхідно виконати такі операції:
Отримати сигнали хп-х,...,хп-т,уп-х,...уп-l. їх можна одержати з хп і уn за допомогою реалізації затримок на один період дискретизації Та. У разі апаратної, мікропроцесорної реалізації цифрового фільтра для отримання затриманих сигналів використовують стек.
Перемноження одержаних на елементах затримки сигналів на постійні коефіцієнти ат і bl.
Підсумування отриманих сигналів, яке може бути реалізовано програмно або на суматорах.
Згідно з (1.4) побудована блок-схема симетричного нерекурсивного ЦФ (рис. 1.7).

Рис.
1.7.
Блок-схема
нерекурсивного фільтра
У рекурсивних фільтрах існує зворотний зв’язок за вихідним сигналом, який може спричиняти нестабільність. У випадку збудження такого фільтра вхідним сигналом його вплив теоретично ніколи не зникає. На рис. 1.8 наведена блок-схема рекурсивного фільтра, яка побудована згідно з (1.15). Схема такого фільтра вимагає М + L аперіодичних ланок і М + L +1 перемножувачів.
Імпульсний відгук рекурсивного цифрового фільтра розглянемо на прикладі. Нехай ЦФ рекурсивного типу описують таким диференціальним рівнянням
![]()
Н а
його вхід подається одиничний імпульс
а
його вхід подається одиничний імпульс
Рис.
1.8. Блок-схема рекурсивного фільтра