

4.1.3 Устройство управления
Служит для управления отдельными блоками МП, а также формирования сигналов для управления периферийным оборудованием, обеспечивая обмен данными с использованием механизмов стробирования, прерывания и ПДП. В зависимости от значения сигналов на управляющей шине min/max МП может работать в 2-х режимах: min и max конфигурация. В зависимости от значения сигналов на этой линии меняется интерпретация 8 сигналов МП. В min конфигурации, которая рассчитана на простые системы, МП сам вырабатывает все управляющие системы для всей системы. В max конфигурация, которая рассчитана на сложные системы, МП вырабатывает сигналы только для специальных дополнительных микросхем, т.е. специализированные контроллеры с шиной, который в свою очередь управляют всей системой.
На структурной схеме сигналы отмечены для min конфигурации. ША и ШД Ад0-15 используется для передачи 16-разрядного адреса в начале машинного цикла, а затем для приема/приема 16-разрядного слова (команда или данные). При этом шина может быть переведена в 3С.
Линия адреса состояния A16-19/S3-6 выполняет следующие функции: в первом такте машинного цикла здесь представлены значения 4-х старших разрядов кода адреса; в последующих тактах по этой линии передаются управляющие сигналы 3-6. Где сигналы S3-S4 индентифицируют сегмент памяти, участвующей в формировании исполнительного адреса. S5 – аппаратное разрешение прерывания. S6 в min конфигурации не используется.
УУ делится на 4 части:
1) управление шиной
2) МП
3) прерыванием
4) ПДП
1) сигналы на этом блоке определяют операцию, выполняемую в МП, а также задает режим работы ША и ШД. Сигналы чт/зап управляют режимом работы блоков памяти и УВВ. П/ВВ определяет тип устройства, в котором будет происходить обмен. РАА разрешение работы регистра адреса, является строб сигналом, по которому в первом такте машинного цикла индетифицируется значение на ША как адрес и используется для загрузки этого значения во внешний регистр AD. Сигнал передачи/приема определяет направление передачи данных с УВВ, является управляющим сигналом внешнего устройства. Работает совместно с сигналом СД (стробируемые данные), который используется для управления режимом работы шины прерывания.
2) Сигналы на этих линиях определяют состояние и режим работы МП. Готов/ож обеспечивает возможность работы МП с любым типом внешних устройств. Позволяет переводить МП в режим ожидания. Сигнал готовность еще использоваться в процессе отладки для пошагового исполнения программы. Сброс – перевод МП в исходное состояние, осуществляется сброс СК и сегментного регистра.
3) Содержит 3 сигнала: запрос на прерывание, подтверждение прерывания. Кроме этого МП содержит специальный код, называемый немаскированное прерывание, представляющий сигнал запроса от внешнего устройства, которое воспринимает МП независимо от своего текущего состояния. К данной линии подключаются системы, которые фиксируют аварийное состояние МПС или объекта управления.
По сигналам запроса прерывания МП помещает в стек содержимое регистра признаков, сегментного регистра кода, регистра команд и передает управление подпрограмме с фиксированным начальным адресом. Начальный адрес задается байтом, который передается МП из интерфейса прерывающего устройства по сигналу подтверждения прерывания.
4) Содержит 2 линии запроса на ПДП и подтверждения ПДП. На входе запроса от контроллера внешнего устройства поступает сигнал запроса. По окончании текущего цикла передачи по шине МП сам МП переводит буферные схемы шин, а также некоторые управляющие сигналы в 3С и формирует сигнал подтверждения, который подтверждает соответствующий режим, по которому управление шиной передается контроллеру внешнего устройства. Из состояния при остановки выполнения программы МП выходит по окончанию сигнала запроса ПДП.
Работа устройства управление. Диаграмма работы
Учитывая, что в данном МП диаграммы работы представляет собой цикл обращения к памяти, а это происходит независимо от выполняемой функции в операционном устройстве имеет практически такой же вид, за исключением наличия/отсутствия сигналов чт/зап.
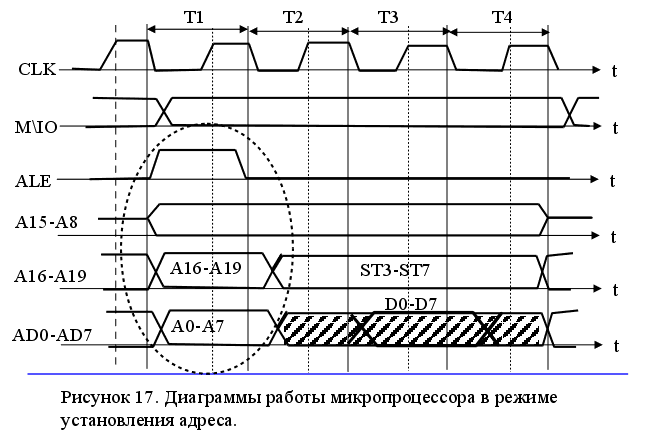
Дискретность машинного времени МП задают на линии сигнала синхронизации (СС), который задается с внешнего генератора с f=5МГц. Каждый машинный цикл МП состоит из 4-х тактов, которые соответствуют состоянию Т1, Т2, Т3, Т4 автомата управления МП. Между Т3 и Т4 с помощью сигнала готовности можно ввести произвольное число тактов ожидания Тож, что позволяет работать МП с любым типом медленных внешних устройств.
Каждый машинный цикл Мп представляет собой цикл шины. Т.к. МП в такте Т1 каждого машинного цикла выдает на линиях А0-19 (из 2-х частей) код адреса памяти и формирует сигнал сопровождения и индентификации РРА, по которым эта информация загружается во внешний регистр. В последующих тактах по этим линиям осуществляется передача данных.
В тактах Т2, Т3, Т4 по линии А16-19 передается словосостояние, которое индентифицирует тип машинного цикла (актуально для min конфигурации МПС). Одновременно с передачей алреса по шине МП может формироваться сигнал передачи байта ПБ, который сопровождает передачу данных по линии АД0-15. В результате этих действий в такте Т1 по шинам АД передается адрес, Т2-Т4 передается или принимается 2-х байтное слово. Строб сигнал чтения используется для управления режимом работы регистра памяти, данных или УВВ. В режиме ПДП линия чтения переводится в 3С и за организацию направления отвечает сигнал подтверждения прерывания, который является стробирующим и используется для ввода в МП вектора прерывания из УВВ. Соответственно в режиме ПДП линия чтения и подтверждения прерывания находятся в 3С. Сигнал Гт используется МП в качестве сигнала подтверждения окончания передачи данных. Устройство управления МП опрашивает значение сигналов МП в начале такта Т3 и в зависимости от его значения переводит МП в состояние ожидание/Т4.
Сигнал передачи/прием управляет работой шины драйверов и определяет направление передачи: МП-ЯП или ЯП-МП. Управляющие сигналы стробирования данных формируется в МП при обращении к памяти или УВВ непосредственно в такте передачи данных по шине (в том числе в машинном цикле подтверждения прерывания).
Сигнал записи является истиной в циклах записи памяти и вывода информации в адресуемый код УВВ.