

3.2. Выбор внешнего диаметра сердечника статора
Внешний диаметр сердечника статора выбирают, исходя из зависимости (3.1). Она показывает, что при одной и той же длине lδ мощность P’ изменяется пропорционально D2. Поэтому машину при выбранной высоте оси вращения выгодно выполнять с возможно большим диаметром. Максимально возможный диаметр Dа должен быть
Dа ≤2(h–h1min),
где h1min — минимальное расстояние от стали сердечника статора до опорной плоскости машины (рис. 3.2), включающее толщину корпуса bкорп и расстояние h2 от корпуса до опорной плоскости. Если машина выполняется со сварной станиной, то допустимое расстояние h1min уменьшается. В том случае, когда h1 >> h1min , в нижней части корпуса оребренных двигателей исполнения со степенью защиты IP44 размещают несколько охлаждающих ребер, высота которых может быть меньше, чем у расположенных на верхней и боковых частях корпуса.
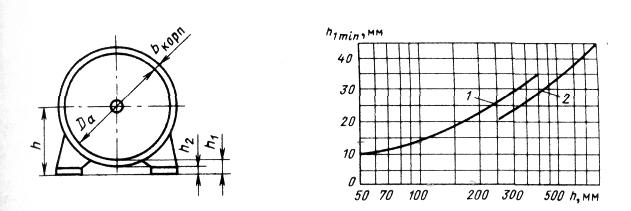
Рис.3.2. К выбору наружного диаметра Da статора
Обычно расстояние h1 выбирают равным или несколько большим h1min, значения которого для двигателей с различной высотой оси вращения h приведены на рис. 3.3. При выборе Da должно быть учтено также требование использования для штамповки рулонной или листовой электротехнической стали стандартных размеров с наименьшими отходами.
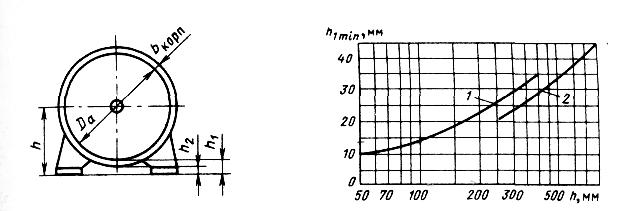
Рис. 3.3. Минимально допустимое расстояние h1min от сердечника статора до опорной поверхности двигателя в зависимости от высоты оси вращения
двигателей со станиной: 1 – литой; 2 – сварной
Внешние диаметры сердечников статоров двигателей серий в зависимости от высоты оси вращения при учебном проектировании могут быть приняты по данным табл. 3.1.
Внутренний диаметр статора D в общем случае может быть определен по внешнему диаметру, высотам ярма ha и зубцов статора h2:
D =Da– 2(ha + h2).
Таблица 3.1
Внешние диаметры статоров асинхронных двигателей различных высот оси вращения
h, мм |
56 |
63 |
71 |
80 |
90 |
Da, мм |
0,08–0,096 |
0,1–1,08 |
0,116–0,122 |
0,131–0,139 |
0,149–0,157 |
h, мм |
100 |
112 |
132 |
160 |
180 |
Da , мм |
0,168–0,175 |
0,191–0,197 |
0,225–0,233 |
0,272–0,285 |
0,313–0,322 |
h, мм |
200 |
225 |
250 |
280 |
315 355 |
Da, мм |
0,349–0,359 |
0,392–0,406 |
0,437–0,452 |
0,52–0,53 |
0,59 0,66 |
На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости, основанные на следующем.
При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение
D=KDDa. (3.2)
Значения коэффициентов KD, приведенные в табл. 3.2, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Таблица 3.2
Отношение Kd = D/Da в асинхронных двигателях в
зависимости от числа полюсов
2р |
2 |
4 |
6 |
8 |
10–12 |
KD |
0,52–0,6 |
0,62–0,68 |
0,7–0,72 |
0,72–0,75 |
0,75–0,77 |
Далее находят полюсное деление τ, м,
τ = πD/2p, (3.3)
и расчетную мощность Р', ВА,
(3.4)![]()
г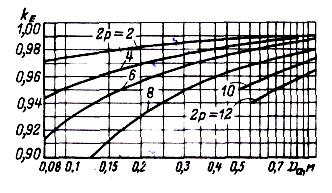 де
P2
— мощность на валу двигателя, Вт; kE
— отношение
ЭДС обмотки статора к номинальному
напряжению, которое может быть приближенно
определено по кривым рис. 3.4.
де
P2
— мощность на валу двигателя, Вт; kE
— отношение
ЭДС обмотки статора к номинальному
напряжению, которое может быть приближенно
определено по кривым рис. 3.4.
Рис.3.4. Значения коэффициента kE
П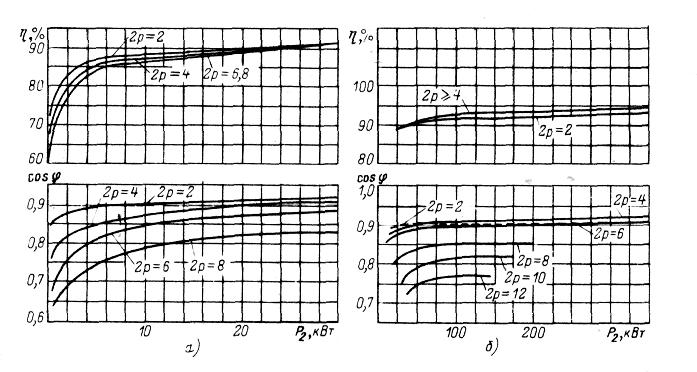 редварительные
значения η
и cosφ,
если
они не указаны в задании на проектирование,
находятся по ГОСТу. Приближенные значения
η
и
cosφ
могут быть приняты по кривым рис. 3.5.
редварительные
значения η
и cosφ,
если
они не указаны в задании на проектирование,
находятся по ГОСТу. Приближенные значения
η
и
cosφ
могут быть приняты по кривым рис. 3.5.
Рис. 3.5. Примерные значения КПД и cosφ асинхронных двигателей:
а – со степенью защиты IP44 и мощностью до 30 кВт; б – со степенью защиты IP44 и мощностью до 400 кВт