

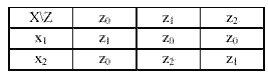
Зведена таблиця для f- автомата Мура.

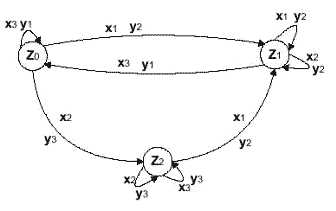
При іншому способі задання скінченого автомата використовується поняття направленого графа. Граф автомата представляє собою набір вершин, які відповідають різним станам автомата і з’єднуючих вершини дуг графа, які відповідають тим чи іншим переходам автомата. Якщо вхідний сигнал хк викликає перехід із стану zi в стан zj, то на графі автомата дуга, яка з’єднує вершину zi позначається xk. Для того, щоби задати функцію виходів дуги графа необхідно відмітити відповідними вихідними сигналами. Для автоматів Мілі ця розмітка відбувається наступним чином. Якщо вхідний сигнал хк діє на стан zi, то, згідно сказаному вище, отримується дуга, яка виходить з zi і помічається хк. Цю дугу додатково відмічають вихідним сигналом y= ψ(zi,xk). Для автомата Мура ця розмітка така. Якщо вхідний сигнал хк, який діє на деякий стан автомата, викликає перехід в стан zj, то дугу, яка направлена в zj і помічену хк додатково відмічають вихідним сигналом y= ψ(zj,xk).
Розглянемо приклади представлення графом.
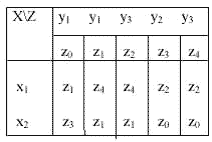
F-автомат Мілі.
Таблиця переходів
Таблиця виходів
![]()

F-автомат Мура

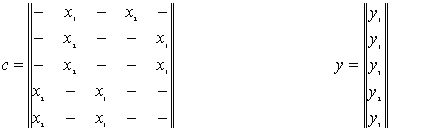
При рішенні задач моделювання систем часто зручнішою формою є матричне задання. При цьому матриця C=||Cij||, стрічки якої відповідають біжучим станам, а стовбці - станам переходу, містить елементи ci,j =xk/ys, де xk - вхідний сигнал, ys - вихідний сигнал. Для F-автомата Мілі відповідна матриця буде виглядати наступним чином:

Якщо перехід із стану zi в стан zj відбувається під впливом декількох сигналів, елемент матриці ci,j представляє собою множину пар вхід-вихід для цього переходу, які з’єднані знаком диз’юнкції “V”. Для F- автомата Мура елемент ci,j дорівнює множині вхідних сигналів на переході zi - zj, а вихід описується вектором виходів:

i-та компонента якого - вихідний сигнал, який відповідає стану zi.
Для розглянутого F- автомата Мура матриця з’єднань і вектор виходів має вигляд:
Для детермінованих автоматів виконується умова однозначності переходів, тобто автомат, який знаходиться в деякому стані, під дією будь-якого вхідного сигналу не може перейти в більш ніж в один стан. Стосовно до графічного опису F- автомата, це означає, що на графі автомата з будь-якої вершини не можуть виходити два і більше ребра, помічених одним і тим самим вхідним сигналом. Розглянемо вид таблиці переходів і граф асинхронного скінченого автомата. Для F- автомата стан zk називається стійким, якщо для будь-якого вхідного сигналу xi, для якого виконується умова φ(zk,xi)=zk, існує ψ(zk,xi)=yk. Таким чином F- автомат називається асинхронним, якщо кожен його стан zk, який належить множині z, є стійким.
Асинхронний F- автомат Мура.
В якості об’єктів, які описуються F-автоматами можна назвати елементи і вузли ЕОМ, пристрої контролю, регулювання і управління. Для всіх цих об’єктів характерними є дискретний характер роботи у часі.
Лекція 5. Дискретно-стохастичні моделі (р-схеми).
Розглянемо даний підхід на прикладі ймовірнісних автоматів. Ймовірнісний автомат можна визначити як дискретний потактовий перетворювач інформації з пам’ятю, функціонування якого в кожному такті залежить тільки від стану пам’яті і може бути описане статистично. Введемо визначення Р-автомата, використовуючи поняття F-автомата.
Розглянемо множину G, яка представляє собою елементи (zk,zi), де zk – стан, zk Є Z; xi – вхідний сигнал, xi Є X.
Якщо існують функції φ(zk,xi) і ψ(zk,xi), які відображають множину G відповідно на множини Z і Y (G→Z і G→Y), то говорять, що заданий F-автомат F<Z, X, Y, φ, ψ >.
В більш загальному виді математичну схему Р-автомата можна представити наступним чином.
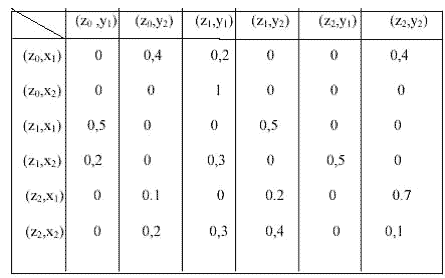
Нехай крім множини G задана множина Ф(zk,yj). Тоді якщо існує відображення множини G на множину F у вигляді закону розподілу для кожного елемента (zk,xi), то говорять, що заданий ймовірнісний Р-автомат.
Цей закон розподілу можна представити у вигляді таблиці:

j - кількість вихідних сигналів.
![]()
Приклад.
Х={x1, x2}
Z={z0, z1, z2}
Y={y1, y2}
Кількість таких розподілів дорівнює кількості елементів множини G. Тому ймовірнісний автомат P можна представити як P<Z, X, Y, B>. В- сукупність розподілів.
Нехай елементи множини G визначають деякі закони розподілу на підмножини Y, Z.

![]() -
умови нормування.
-
умови нормування.
Якщо для всіх значень l і q виконується умова lkqj=bkj, то такий ймовірнісний автомат називається ймовірнісним автоматом Мілі. Ця вимога означає виконання умови незалежності розподілів для нового стану Р-автомата і його вихідного сигналу.
Нехай тепер значення вихідного сигналу Р-автомата залежить тільки від стану, в якому знаходиться автомат в даний момент часу.

Якщо для будь-якого к і j виконується lksj=bkj, то такий ймовірнісний автомат називається автоматом Мура.
Якщо вихідний сигнал P-автомата визначається детерміновано, то такий автомат називається Y- детермінованим P- автоматом.
Z- детермінованим ймовірнісним автоматом називається Р- автомат, у якого вибір нового стану є детермінованим.
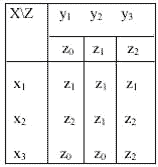
Розглянемо Y-детермінований Р-автомат, який задається таблицею переходів Р і таблицею виходів.

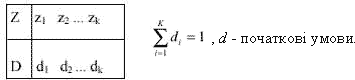
Будемо вважати, що до початку роботи Р-автомат завжди знаходиться в стані z0 і в нульовий такт часу міняє стан у відповідності з розподілом D. Інформацію про початковий стан зручно внести в матрицю Р змінивши її розмірність до (к+1) (к+1). Перша стрічка, яка буде співставлятися з z0 буде мати вигляд: 0, d1, d2, ... , dk, а перший стовбець буде нульовим. Описаний Y-детермінований Р-автомат можна задавати у вигляді орієнтованого графа, вершини якого співставляються станам автомата, а дуги - можливим переходам з одного стану в другий. Дуги мають вагу, яка відповідає ймовірності переходу pij. Біля вершин графа записуються значення вихідних сигналів, які викликаються цими станами. Задання Y-детермінованого Р-автомата еквівалентне заданню деякого дискретного марківського ланцюга із скінченою множиною станів. Тому апарат марківських ланцюгів є основним для використання Р-схем для аналітичних розрахунків.
Розглянемо приклад Y- детермінованого P - автомата.
Вимагається оцінити суму фінальних ймовірностей перебування автомата в станах z2 і z3, в яких на виході автомата видається одиничний вихідний сигнал.

Оскільки фінальні ймовірності не залежать від стану z0, то ймовірність знаходження в станах z1, z2, z3, z4 можна знайти з матричного рівняння:
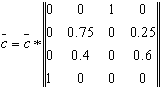
де c=(c1, c2, c3, c4)
c1=c4 c2=0.75c2 + 0.4c3 c3=c1 c4=0.25c2 + 0.6c3 c1+c2+c3+c4=1 - умова нормування. c2=8/23, c3=5/23, c2+c3=13/23.
Для оцінки різних характеристик досліджуваних систем, які представляються у вигляді Р - схем, крім аналітичних моделей можна застосувати і імітаційні моделі.