

1
Для сокращения сроков сертификации и летных испытанный в последнее время все больший объем работы переводится на наземные стенды в качестве одного из таких стендов используется реальный самолет, на котором идет подготовка к первому полету.

2
Системы координат
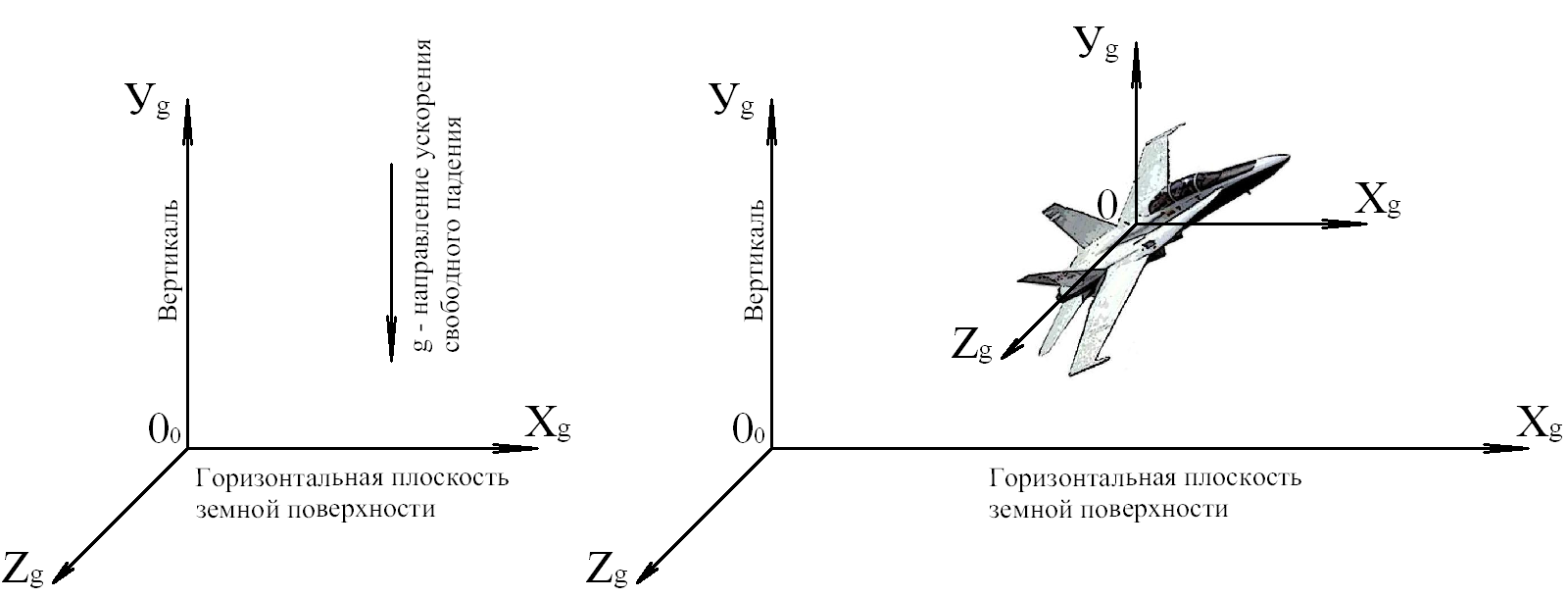
Нормальная земная система координат
Система
координат (рис. ), начало которой
![]() фиксировано по отношению к Земле, ось
фиксировано по отношению к Земле, ось
![]() направлена по местной вертикали вверх,
а направления осей
направлена по местной вертикали вверх,
а направления осей
![]() и
и
![]() выбираются в соответствии с задачей.
выбираются в соответствии с задачей.
3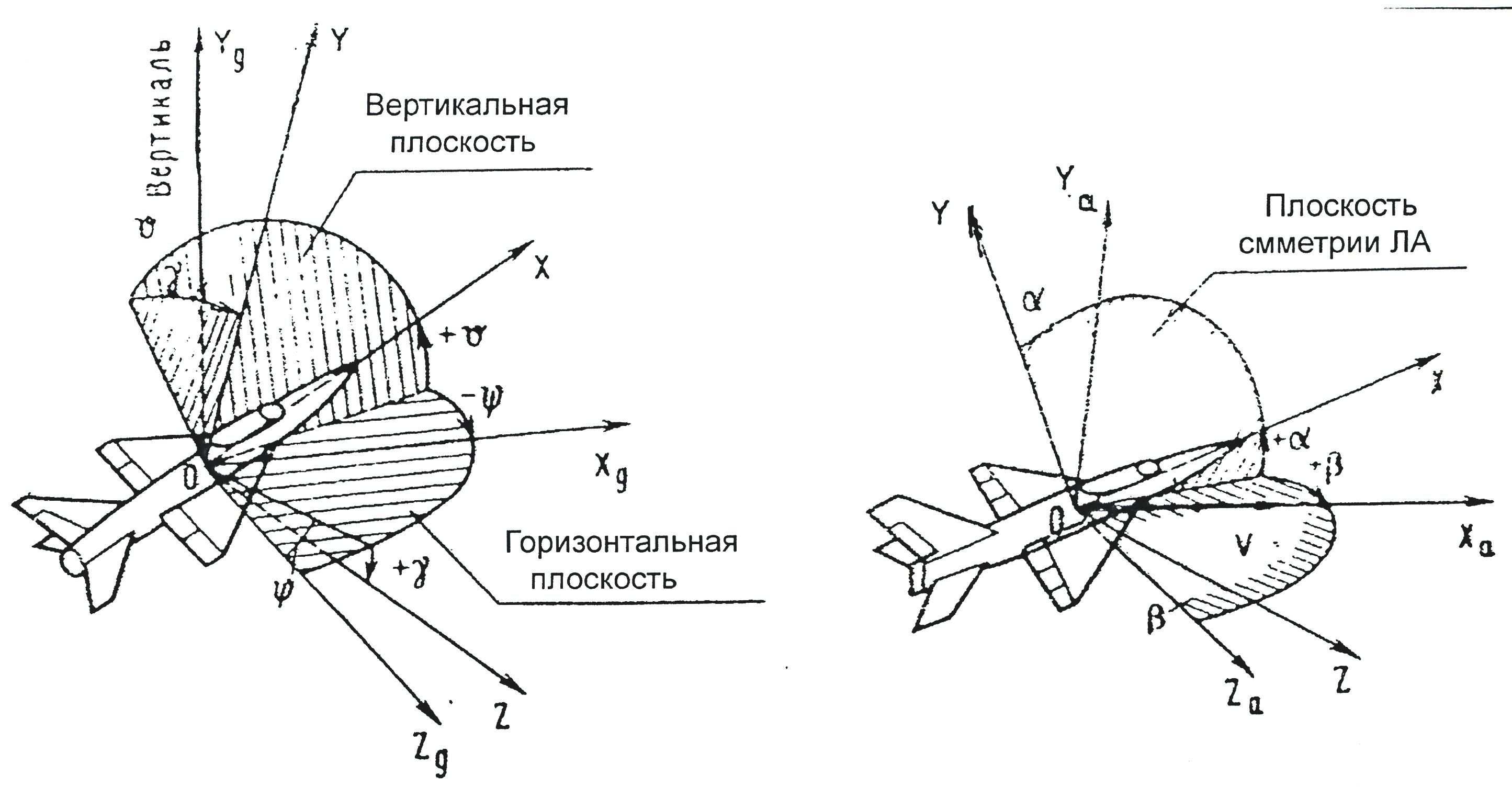
Рис.
Связанная система координат
|
Рис.1.4.
Скоростная система координат
|
1 4 .2 Скоростная система координат
Система
координат (рис. 4), начало которой О
помещено в центре масс ЛА, ось
![]() совпадает по направлению с вектором
скорости, ось
совпадает по направлению с вектором
скорости, ось
![]() расположена в плоскости симметрии ЛА
и направлена к верхней его части. Ось
расположена в плоскости симметрии ЛА
и направлена к верхней его части. Ось
![]() перпендикулярна плоскости
перпендикулярна плоскости
![]() .
.
Углы, определяющие положение летательного аппарата относительно вектора скорости
Угол
атаки α
-
угол между связанной осью
![]() и проекцией вектора скорости на плоскость
симметрии ЛА.
и проекцией вектора скорости на плоскость
симметрии ЛА.
Угол скольжения β - угол между вектором скорости и плоскостью симметрии ЛА. Знаки углов атаки и скольжения определены на рис. 4.
Углы, определяющие положение летательного аппарата относительно Земли
По определению нормальной и связанной систем координат положение ЛА относительно Земли определяется углами между осями связанной и нормальной системы координат.
Угол
тангажа υ
–
угол
между связанной осью
и горизонтальной плоскостью
![]() ;
;
Угол
рыскания
ψ
–
угол
между осью
![]() и проекцией связанной оси
на горизонтальную плоскость
;
и проекцией связанной оси
на горизонтальную плоскость
;
У
5![]() и осью
и осью
![]() смещенной
в положение, соответствующее нулевому
углу рыскания.
смещенной
в положение, соответствующее нулевому
углу рыскания.
Знаки углов определены на рис. 3.
Воздушная
скорость
![]() летательного
аппарата – скорость центра масс (начала
О
связанной системы координат) относительно
воздушной среды, не возмущенной
летательным аппаратом.
летательного
аппарата – скорость центра масс (начала
О
связанной системы координат) относительно
воздушной среды, не возмущенной
летательным аппаратом.
Земная
скорость летательного аппарата
![]() –
скорость центра масс (начала О
связанной системы координат) относительно
выбранной земной системы координат.
–
скорость центра масс (начала О
связанной системы координат) относительно
выбранной земной системы координат.
Путевая
скорость летательного аппарата
![]() –
проекция земной скорости летательного
аппарата на горизонтальную плоскость.
–
проекция земной скорости летательного
аппарата на горизонтальную плоскость.
Траекторные углы
Угол пути ψ – угол между осью и путевой скоростью летательного аппарата (рис.5)
В продольном движении центра масс на самолет как на любое тело, действуют четыре силы, условно приложенные в центре масс. Эти силы фактически являются суммой сил, действующих на различные элементы самолета.
1
6![]() (земная система координат)
(земная система координат)
2.
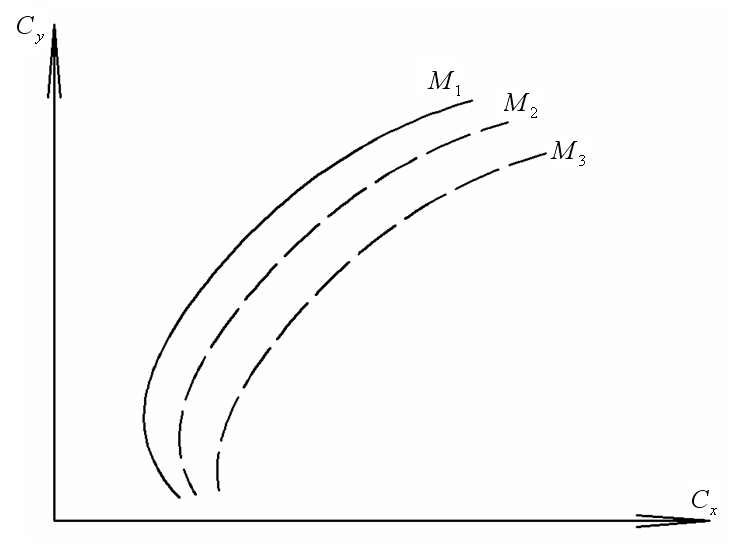
Подъемная сила
![]() (скоростная с-ма координат)
(скоростная с-ма координат)
3.
Сила сопротивления
![]() (скорост.
с-ма координат)
(скорост.
с-ма координат)
4.
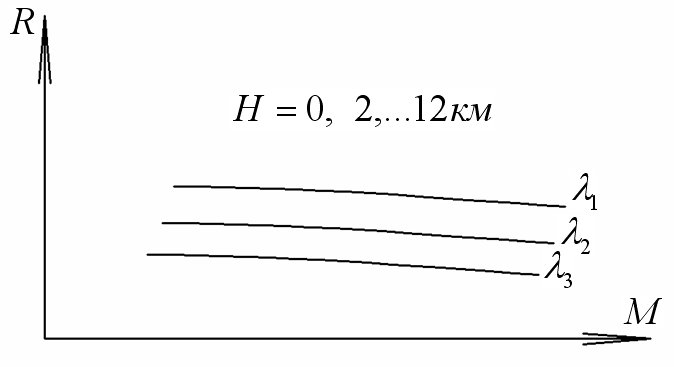
Сила тяги двигателей
![]() (связанная система)
(связанная система)
![]() -
режим работы двигателей.
-
режим работы двигателей.
2. Система уравнений движения
Уравнения движения записываются в проекциях на скоростную систему координат
|
|
|
|
Поскольку
![]() ,
,
![]() равно центростремительному ускорению
равно центростремительному ускорению
![]() -
мал,
-
мал,
![]() -
мал, то уравнения (1), (2) можно переписать
в виде:
-
мал, то уравнения (1), (2) можно переписать
в виде:
|
|
|
|
Для определения ЛТХ нужно добавить переход от скоростной системы к земной, а также отдельное уравнение для расхода топлива.
7
Получим
систему из дифференциальных уравнений
(опуская индекс «а», т.е.
![]() ,
,
![]() ):
):
|
|
|
|
|
|
|
|
|
|
![]() -
секундный расход топлива двигателя,
задается в виде:
-
секундный расход топлива двигателя,
задается в виде:
![]() ,
,
![]()
![]() -
данные моторного завода.
-
данные моторного завода.
Из
решения уравнений (1)-(6) можно найти
показатели ЛТХ:
![]() .
.
Эти уравнения решаются, как правило, методами численного интегрирования, для чего необходимо записать еще ряд аналитических и графических зависимостей:
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
8А
Система уравнений (1) – (13) содержит 15 неизвестных, т.е. две неизвестных должны быть заданы и называются управлениями. Для типового профиля полета задаются:
В
9
злет: ,
,
 .
.
Набор высоты:
 ,
,
 .
.
Крейсерский полет: а.)
 ,
,
 ,
,
б.)
,
![]() .
.
Снижение (планирование):
 ,
,
 .
.
Заход на посадку:
 ,
,
 .
.
На
предварительных этапах проектирования
система уравнений (1) – (13) обычно решается
приближенными методами. Для этого
вводятся допущения для режимов 2, 3, 4:
![]() ,
,
![]() .
Параметры скорость
и угол наклона траектории
.
Параметры скорость
и угол наклона траектории
![]() меняются медленно для транспортных
магистральных самолетов. Кроме того, в
ряде случаев можно считать, что угол
мал, т.е.
меняются медленно для транспортных
магистральных самолетов. Кроме того, в
ряде случаев можно считать, что угол
мал, т.е.
![]() ,
,
![]() .
.